Servo Tuning Advice

(more D will allow more P up to a point) then back off on both proportionally until its stable again. (do this with no I term)
Then as I said before, add I until its unstable and then use 1/2 to 1/3 of that amount of I
I suspect you need 10 to 1000 times more I
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
 Topic Author
Topic Author
- Away
- Platinum Member
-

- Posts: 4963
- Thank you received: 1369
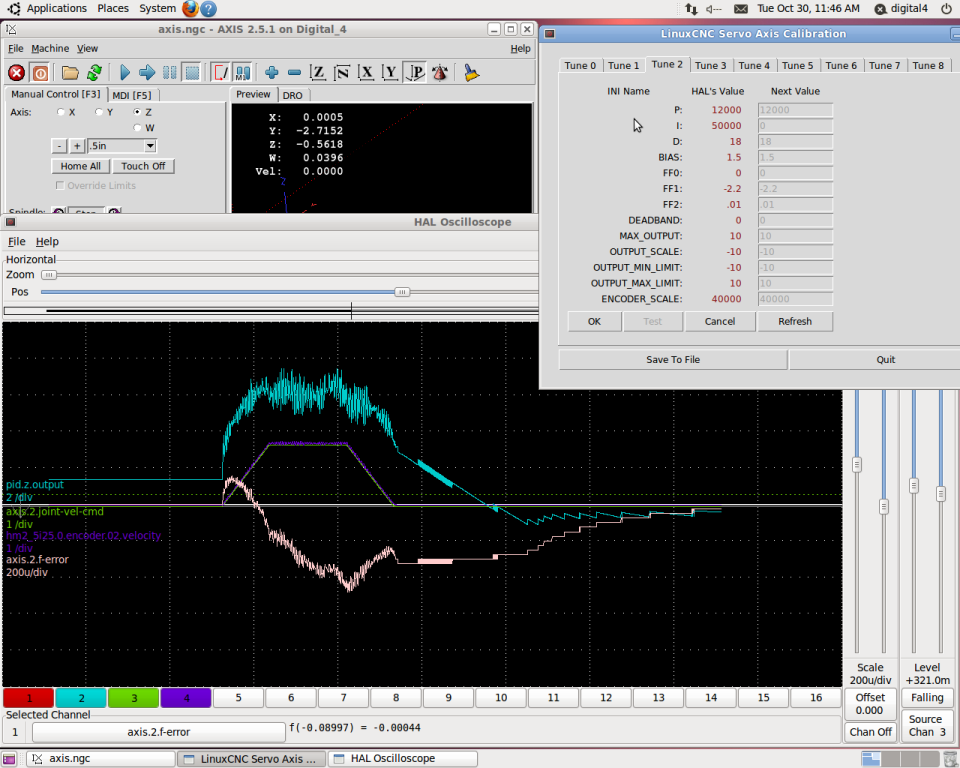
Yes, heres a static error (250 uInch) in the middle that the Integral term should pull in
I would make the integral term larger until it gets unstable and then use about 1/2 to 1/3 of that amount. Seems like the deadband could be smaller as well just so it does not interfere with interpretation of the plots
When I make "I" large the whole thing starts shifting up (like adding more bias). Is it normal for this to happen? Then should I use the bias to pull it back to 0?
Please Log in or Create an account to join the conversation.
A plot would help
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
Topic Author
- Away
- Platinum Member
-
- Posts: 4963
- Thank you received: 1369
After about 5000 or so I stopped moving the error away like the bias, and started to bring the steady state error in line.

Please Log in or Create an account to join the conversation.
beginning and ending of motion by increasing 'I' further
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
Topic Author
- Away
- Platinum Member
-
- Posts: 4963
- Thank you received: 1369

Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
Topic Author
- Away
- Platinum Member
-
- Posts: 4963
- Thank you received: 1369
Please Log in or Create an account to join the conversation.

Some controllers zero out the I term when the error term changes sign. (But sometimes that is very much the wrong thing to do)
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
Topic Author
- Away
- Platinum Member
-
- Posts: 4963
- Thank you received: 1369
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
Topic Author
- Away
- Platinum Member
-
- Posts: 4963
- Thank you received: 1369
Please Log in or Create an account to join the conversation.