Vismach Origin Coordinates Bug [Solved]
- jstoquica
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 137
- Thank you received: 9
14 Aug 2015 05:06 - 15 Aug 2015 21:39 #61391
by jstoquica
Vismach Origin Coordinates Bug [Solved] was created by jstoquica
Hi,
Recently I modelled my robot in vismach, and generate its kinematics parameters. Now when I try to test de simulation model in vismach I don't know how can I define the origin coordinates for the Degrees Of Freedom. In the documentation of vismach the command HalRotate() is who can do it, but it define what axis (X,Y or Z) but I don't know the position of the rotation axis. In the picture, as can you see the parts of robots turn according of home coordinates (0,0,0), like the all of axis were fixed.
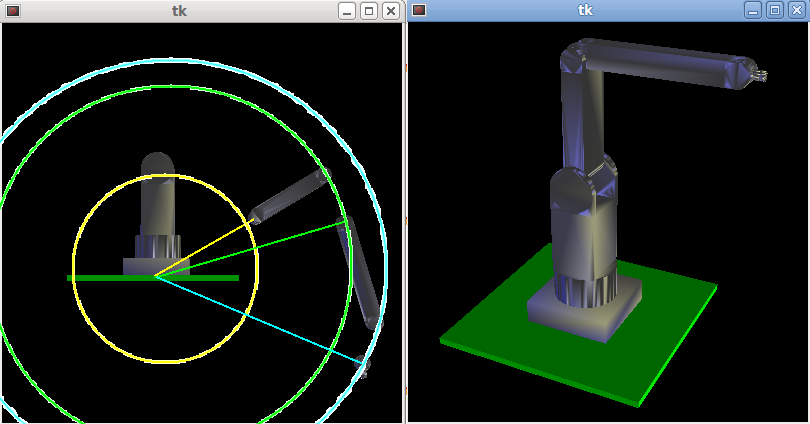
I appreciate you contribution with this development and the vismach information.
Recently I modelled my robot in vismach, and generate its kinematics parameters. Now when I try to test de simulation model in vismach I don't know how can I define the origin coordinates for the Degrees Of Freedom. In the documentation of vismach the command HalRotate() is who can do it, but it define what axis (X,Y or Z) but I don't know the position of the rotation axis. In the picture, as can you see the parts of robots turn according of home coordinates (0,0,0), like the all of axis were fixed.
I appreciate you contribution with this development and the vismach information.
Last edit: 15 Aug 2015 21:39 by jstoquica.
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 137
- Thank you received: 9
15 Aug 2015 21:26 #61414
by jstoquica
Replied by jstoquica on topic Vismach Origin Coordinates Bug [Solved]
Hi everyone,
I got the desired simulation in vismach as can you see in the image attached. The "key" is first positioning the part in the origin (0,0,0,) in its rotation axis, next make assembly with Collection() and then move the all system to desired position.
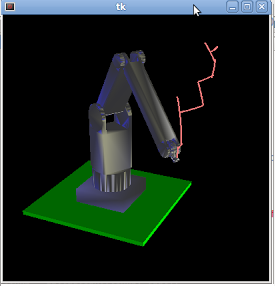
Regards.
I got the desired simulation in vismach as can you see in the image attached. The "key" is first positioning the part in the origin (0,0,0,) in its rotation axis, next make assembly with Collection() and then move the all system to desired position.
Regards.
Please Log in or Create an account to join the conversation.
- cncbasher
- Offline
- Moderator
-

Less
More
- Posts: 1744
- Thank you received: 288
16 Aug 2015 16:36 #61428
by cncbasher
Replied by cncbasher on topic Vismach Origin Coordinates Bug [Solved]
hello and welcome to linuxcnc .
their are not many people using linuxcnc with robotics , perhaps attach your archive of files and kinematics
this will help others .
glad you managed to solve your vismach display
their are not many people using linuxcnc with robotics , perhaps attach your archive of files and kinematics
this will help others .
glad you managed to solve your vismach display
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 137
- Thank you received: 9
24 Aug 2015 19:31 #61742
by jstoquica
Replied by jstoquica on topic Vismach Origin Coordinates Bug [Solved]
Hi,
It's true, are not many people working with robotics and vismach. When I'll finish my project, I am going to publishing the results for others developers.
I have a question, How do I have to do for LinuxCNC admin checks and approves my simulation for publish it into a new linuxcnc version (with default examples like Puma or Puma560)?
Regards.
It's true, are not many people working with robotics and vismach. When I'll finish my project, I am going to publishing the results for others developers.
I have a question, How do I have to do for LinuxCNC admin checks and approves my simulation for publish it into a new linuxcnc version (with default examples like Puma or Puma560)?
Regards.
Please Log in or Create an account to join the conversation.
- BigJohnT
-

- Offline
- Administrator
-

Less
More
- Posts: 7000
- Thank you received: 1176
25 Aug 2015 03:37 #61758
by BigJohnT
Replied by BigJohnT on topic Vismach Origin Coordinates Bug [Solved]
The best place is to add it to the Wiki. Anyone can edit the Wiki.
JT
JT
Please Log in or Create an account to join the conversation.
Time to create page: 0.109 seconds