[SOLVED]strange soft limit area is possible??
- bkt
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1111
- Thank you received: 114
17 Oct 2016 08:09 - 15 Mar 2017 15:18 #81713
by bkt
[SOLVED]strange soft limit area is possible?? was created by bkt
Is possible in normal mill installation add an area (not single axis) as soft limit (see an example on mi bad picture)??
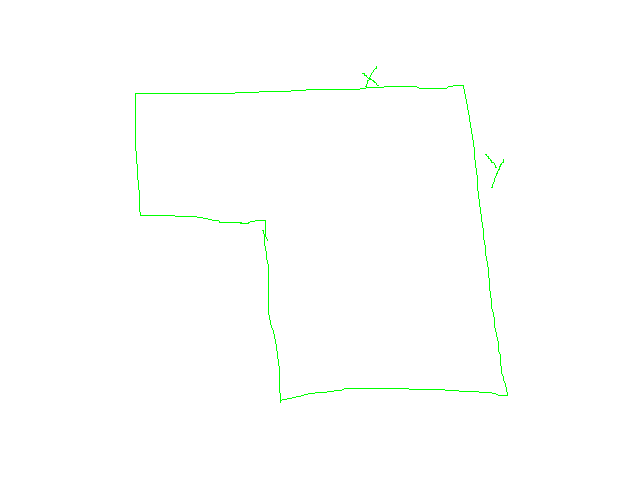
Or these is possible only with adding custom kins on mill kins??
Regards
Giorgio
Or these is possible only with adding custom kins on mill kins??
Regards
Giorgio
Last edit: 15 Mar 2017 15:18 by bkt.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19863
- Thank you received: 4636
17 Oct 2016 22:38 #81748
by andypugh
Replied by andypugh on topic strange soft limit area is possible??
Currently there is no way to have a non-cubic soft limit envelope.
It's a pity, it would be nice to be able to define a soft-limit mesh on quite a range of machines.
It's a pity, it would be nice to be able to define a soft-limit mesh on quite a range of machines.
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
19 Oct 2016 11:44 #81835
by bkt
Replied by bkt on topic strange soft limit area is possible??
ok I put it on my "to-do" bag ....
Regards
giorgio
Regards
giorgio
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
15 Mar 2017 15:18 #89672
by bkt
Replied by bkt on topic strange soft limit area is possible??
Sorry for the very late reply ... but today I had to face the problem again so I wrote this horrible solution ... but it works!
the solution:
I hope these help
Giorgio
the solution:
#ifdef RTAPI
#include "rtapi.h" /* RTAPI realtime OS API */
#include "rtapi_app.h" /* RTAPI realtime module decls */
#include "hal.h"
struct haldata {
hal_float_t *e, *f, *re, *rf, *encval, *encdx, *encdy, *encdz, *xincr, *yincr, *zincr, *aincr, *bincr, *posarea, *secareax, *secareay;
hal_bit_t *resenc, *isteleop, *ismanual, *ishomed, *jx, *jy, *jz, *ja, *jb, *secarea;
} *haldata = 0;
#define delta_e (*(haldata->e))
#define delta_f (*(haldata->f))
#define delta_re (*(haldata->re))
#define delta_rf (*(haldata->rf))
#define delta_encval (*(haldata->encval))
#define delta_encdx (*(haldata->encdx))
#define delta_encdy (*(haldata->encdy))
#define delta_encdz (*(haldata->encdz))
#define delta_xincr (*(haldata->xincr))
#define delta_yincr (*(haldata->yincr))
#define delta_zincr (*(haldata->zincr))
#define delta_aincr (*(haldata->aincr))
#define delta_bincr (*(haldata->bincr))
#define delta_resenc (*(haldata->resenc))
#define delta_isteleop (*(haldata->isteleop))
#define delta_ismanual (*(haldata->ismanual))
#define delta_ishomed (*(haldata->ishomed))
#define delta_jx (*(haldata->jx))
#define delta_jy (*(haldata->jy))
#define delta_jz (*(haldata->jz))
#define delta_ja (*(haldata->ja))
#define delta_jb (*(haldata->jb))
#define delta_secarea (*(haldata->secarea))
#define delta_posarea (*(haldata->posarea))
#define delta_secareax (*(haldata->secareax))
#define delta_secareay (*(haldata->secareay))
#else
double delta_e, delta_f, delta_re, delta_rf, delta_encval, delta_encdx, delta_encdy, delta_encdz, delta_secareax, delta_secareay, delta_posarea;
#endif
/********* other kins part ************/
int kinematicsInverse(const EmcPose *world,
double *joints,
const KINEMATICS_INVERSE_FLAGS *iflags,
KINEMATICS_FORWARD_FLAGS *fflags)
{
double x0, y0, z0, theta1, theta2, theta3;
int status;
x0 = world->tran.x;
y0 = world->tran.y;
z0 = world->tran.z;
if((x0 > delta_secareax) && (y0 > delta_secareay) && (delta_posarea == 1))
{
delta_secarea = 1;
}
else if ((x0 > delta_secareax) && (y0 < delta_secareay) && (delta_posarea == 2))
{
delta_secarea = 1;
}
else if((x0 < delta_secareax) && (y0 < delta_secareay) && (delta_posarea == 3))
{
delta_secarea = 1;
}
else if((x0 < delta_secareax) && (y0 > delta_secareay) && (delta_posarea == 4))
{
delta_secarea = 1;
}
else
{
delta_secarea = 0;
}
joints[3] = world->a;
joints[4] = world->b;
joints[5] = world->c;
joints[6] = world->u;
joints[7] = world->v;
joints[8] = world->w;
theta1 = theta2 = theta3 = 0;
status = delta_calcAngleYZ(x0, y0, z0, &theta1);
if (status == 0) joints[0] = theta1;
if (status == 0) status = delta_calcAngleYZ(x0*cos120 + y0*sin120,y0*cos120-x0*sin120, z0, &theta2); /*rotate coords to +120 deg*/
if (status == 0) joints[1] = theta2;
if (status == 0) status = delta_calcAngleYZ(x0*cos120 - y0*sin120,y0*cos120+x0*sin120, z0, &theta3); /*rotate coords to -120 deg*/
if (status == 0) joints[2] = theta3;
return status;
}
/* implemented for these kinematics as giving joints preference */
int kinematicsHome(EmcPose * world,
double * joint,
KINEMATICS_FORWARD_FLAGS * fflags,
KINEMATICS_INVERSE_FLAGS * iflags)
{
*fflags = 0;
*iflags = 0;
return kinematicsForward(joint, world, fflags, iflags);
}
KINEMATICS_TYPE kinematicsType()
{
return KINEMATICS_BOTH;
/* return KINEMATICS_INVERSE_ONLY;*/
}
#ifdef RTAPI
#include "rtapi.h" /* RTAPI realtime OS API */
#include "rtapi_app.h" /* RTAPI realtime module decls */
#include "hal.h"
EXPORT_SYMBOL(kinematicsType);
EXPORT_SYMBOL(kinematicsForward);
EXPORT_SYMBOL(kinematicsInverse);
MODULE_LICENSE("GPL");
int comp_id;
int rtapi_app_main(void) {
int res = 0;
comp_id = hal_init("delta_AAB_inv");
if(comp_id < 0) return comp_id;
haldata = hal_malloc(sizeof(struct haldata));
if(!haldata) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.e", HAL_IO, &(haldata->e),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.f", HAL_IO, &(haldata->f),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.re", HAL_IO, &(haldata->re),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.rf", HAL_IO, &(haldata->rf),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.encval", HAL_IN, &(haldata->encval),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.encdx", HAL_OUT, &(haldata->encdx),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.encdy", HAL_OUT, &(haldata->encdy),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.encdz", HAL_OUT, &(haldata->encdz),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.xincr", HAL_OUT, &(haldata->xincr),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.yincr", HAL_OUT, &(haldata->yincr),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.zincr", HAL_OUT, &(haldata->zincr),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.aincr", HAL_OUT, &(haldata->aincr),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.bincr", HAL_OUT, &(haldata->bincr),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.secarea", HAL_OUT, &(haldata->secarea),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.posarea", HAL_IN, &(haldata->posarea),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.secareax", HAL_IN, &(haldata->secareax),comp_id)) != 0) goto error;
if((res = hal_pin_float_new("delta_AAB_inv.secareay", HAL_IN, &(haldata->secareay),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.isteleop", HAL_IN, &(haldata->isteleop),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.ismanual", HAL_IN, &(haldata->ismanual),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.ishomed", HAL_IN, &(haldata->ishomed),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.jx", HAL_IN, &(haldata->jx),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.jy", HAL_IN, &(haldata->jy),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.jz", HAL_IN, &(haldata->jz),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.ja", HAL_IN, &(haldata->ja),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.jb", HAL_IN, &(haldata->jb),comp_id)) != 0) goto error;
if((res = hal_pin_bit_new("delta_AAB_inv.resenc", HAL_OUT, &(haldata->resenc),comp_id)) != 0) goto error;
delta_e = delta_f = delta_re = delta_rf = 1.0;
hal_ready(comp_id);
return 0;
error:
hal_exit(comp_id);
return res;
}
void rtapi_app_exit(void) { hal_exit(comp_id); }
#endifI hope these help
Giorgio
Please Log in or Create an account to join the conversation.
Time to create page: 0.289 seconds