External homing (in drives)?
- spumco
- Offline
- Platinum Member
-

Less
More
- Posts: 2126
- Thank you received: 882
09 Jan 2023 01:08 #261315
by spumco
External homing (in drives)? was created by spumco
I'm changing my 4th axis from steppers to a servo and would like to implement index homing rather than just homing to a proxy (current arrangement). The proxy accuracy is decent, but I'd really like the repeatability of the encoder index (i.e. no fiddling with a DTI every time I want to use the 4th axis).
I don't have any encoder/index pins available on my 7i76ED, and from what I understand index pulses are usually too short for GPIO pins to catch.
My drive (Allen Bradley Ultra3000) has an internal move to sensor, home to index function. Encoders are incremental, not absolute.
Browsing the forum I see the Ethercat folks have been working through handing off all homing to the drives and LCNC 'plays dumb'. However, this is not an Ethercat drive - everything I'm doing is bog-standard I/O.
I can see couple possibilities:
Anyone have some thoughts on this, or a better way to let the drive take care of homing?
Thx,
R
I don't have any encoder/index pins available on my 7i76ED, and from what I understand index pulses are usually too short for GPIO pins to catch.
My drive (Allen Bradley Ultra3000) has an internal move to sensor, home to index function. Encoders are incremental, not absolute.
Browsing the forum I see the Ethercat folks have been working through handing off all homing to the drives and LCNC 'plays dumb'. However, this is not an Ethercat drive - everything I'm doing is bog-standard I/O.
I can see couple possibilities:
- Buy a 7i85 and run the drive's encoder passthrough to it. LCNC controls homing exclusively. Simple, but then I'd need a 7i85...
- Connect the homing proxy to LCNC
- Connect LCNC output to drive input (programmed as "start homing")
- Connect LCNC output to drive input (programmed as "home switch")
- This would simply be a pass-through of the signal LCNC receives
- Connect drive output ("axis homed") to LCNC input
- LCNC is configured to use 'home to sensor" strategy
- Home axis is commanded in LCNC
- LCNC drives the servo to the sensor and backs off like usual
- Once LCNC is satisfied it's homed, the "is-homed" signal is transferred via a one-shot to the drive as a "start homing" signal.
- Drive goes through it's internal homing routine
- LCNC has no idea the axis is moving as there's no position feedback.
- Home sensor (proxy) signal is passed through to the drive
- If the drive faults during homing LCNC sees the fault just like any other drive fault and disables everything.
- Drive "axis homed" signal is connected to some sort of LCNC axis-enable signal (grey area, TBD)
Anyone have some thoughts on this, or a better way to let the drive take care of homing?
Thx,
R
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17988
- Thank you received: 5280
09 Jan 2023 01:15 - 09 Jan 2023 01:16 #261317
by PCW
Replied by PCW on topic External homing (in drives)?
If this is just for one channel you only need 1 high speed input to implement
stepgen homing to index. A parallel expansion I/O pin can be use for this with appropriate
firmware (and interface protection) If you have a differential index output and you are not
using the serial expansion port, that's another way to input the index signal (on the RX lines).
stepgen homing to index. A parallel expansion I/O pin can be use for this with appropriate
firmware (and interface protection) If you have a differential index output and you are not
using the serial expansion port, that's another way to input the index signal (on the RX lines).
Last edit: 09 Jan 2023 01:16 by PCW.
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2126
- Thank you received: 882
09 Jan 2023 02:51 #261323
by spumco
Replied by spumco on topic External homing (in drives)?
I really like the idea of using LCNC's onboard homing. Yes, this is for one channel only. Just need LCNC to catch a single index pulse.
I'm assuming by 'parallel expansion IO pin' you mean the 25p headers on my 7i76ED? I'm using the serial interface for my 7i73, so that's not available.
What input/interface protection would be required?
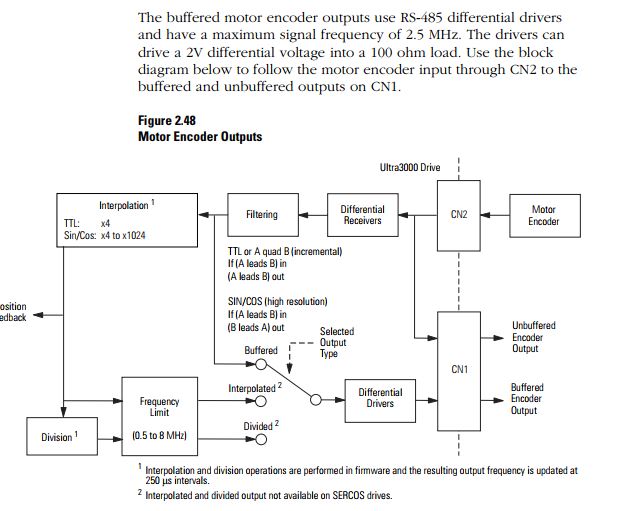
Drive encoder outputs can be buffered or unbuffered. Unbuffered are not conditioned or filtered. Here's a snip from the manual regarding encoder outputs:
I'm assuming by 'parallel expansion IO pin' you mean the 25p headers on my 7i76ED? I'm using the serial interface for my 7i73, so that's not available.
What input/interface protection would be required?
Drive encoder outputs can be buffered or unbuffered. Unbuffered are not conditioned or filtered. Here's a snip from the manual regarding encoder outputs:
Attachments:
Please Log in or Create an account to join the conversation.
- JPL
- Offline
- Platinum Member
-
Less
More
- Posts: 337
- Thank you received: 118
09 Jan 2023 05:56 #261332
by JPL
Replied by JPL on topic External homing (in drives)?
I'm assuming here that you have an Ultra3000i drive (the "i" is for indexing) since only those have the homing feature. If this is the case then IMHO this could be both better and easier to let the drive do the heavy lifting.
With the drive 'home type' set via ultraware to 'To sensor/Fwd to marker' or to 'To sensor/Back to marker', according to your hardware configuration you then need only:
- 1 homing sensor connected to the drive input 'home sensor'
- 1 switch connected to the drive input 'start homing' (no need to pass through linuxcnc)
This will take care of the whole homing procedure on the drive/motor side. This will also make the home position repeatable since this will use the index pulse as you wanted.
Now, for linuxcnc you really don't need more than the 'immediate homing' mode which require ...nothing... except a push of the home button.
To avoid to have to press the home button on the display you can connect the drive digital output "Axis homed" to an input of your 7i76 and use HAL to simulate the activation of the 'home button' of the interface.
With the drive 'home type' set via ultraware to 'To sensor/Fwd to marker' or to 'To sensor/Back to marker', according to your hardware configuration you then need only:
- 1 homing sensor connected to the drive input 'home sensor'
- 1 switch connected to the drive input 'start homing' (no need to pass through linuxcnc)
This will take care of the whole homing procedure on the drive/motor side. This will also make the home position repeatable since this will use the index pulse as you wanted.
Now, for linuxcnc you really don't need more than the 'immediate homing' mode which require ...nothing... except a push of the home button.
To avoid to have to press the home button on the display you can connect the drive digital output "Axis homed" to an input of your 7i76 and use HAL to simulate the activation of the 'home button' of the interface.
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-
Less
More
- Posts: 12032
- Thank you received: 4104
09 Jan 2023 06:17 #261333
by rodw
Replied by rodw on topic External homing (in drives)?
It is possible to write a custom home component. Refer to this doc in V 2.9 linuxcnc.org/docs/2.9/html/man/man9/homecomp.9.html
Its not trivial...
Its not trivial...
Please Log in or Create an account to join the conversation.
- JPL
- Offline
- Platinum Member
-
Less
More
- Posts: 337
- Thank you received: 118
09 Jan 2023 06:18 #261334
by JPL
Replied by JPL on topic External homing (in drives)?
I also wanted to add that for best repeatability between power up/down it is ideal that the home sensor is positioned in such a way that its triggered right in the middle between 2 index pulses. (eg half a turn before or after the index) Too close to an index pulse create a risk that the signal will be caught 1 turn too late or too soon. I'm mentioning this because I have not seen that written anywhere although I know for a fact that this is how Yamaha robot use to set their 'older' linear drive module (before they started to use absolute encoder).
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19876
- Thank you received: 4642
09 Jan 2023 09:52 #261341
by andypugh
I think that this might be simpler than it looks.
Put the A axis last in the homing sequence
Trigger external drive homing of the A axis with the "homing" signal of the first axis in the sequence.
By the time the sequence gets to the A axis it should be externally homed and in position. At that point if the A axis is set to immediate homing in LCNC it will reset to mark the externally-homed position to zero, which will be correct.
Replied by andypugh on topic External homing (in drives)?
My drive (Allen Bradley Ultra3000) has an internal move to sensor, home to index function. Encoders are incremental, not absolute.
I think that this might be simpler than it looks.
Put the A axis last in the homing sequence
Trigger external drive homing of the A axis with the "homing" signal of the first axis in the sequence.
By the time the sequence gets to the A axis it should be externally homed and in position. At that point if the A axis is set to immediate homing in LCNC it will reset to mark the externally-homed position to zero, which will be correct.
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2126
- Thank you received: 882
09 Jan 2023 14:09 #261354
by spumco
Replied by spumco on topic External homing (in drives)?
Thanks all for the feedback. I really like the idea of letting the drive do everything.
@JPL
Yes, it's a 2098-DSD-010X (indexing). Was not aware that only the X models had home to sensor, fwd/back to marker. Although I did find out the sercos models can have the sercos interface disabled which opens up additional IO.
Should be easy enough to adjust the motor-drive coupling to get the index pulse half a rotation from the proxy home switch trigger point. The whole thing is based on a 50:1 harmonic drive and the proxy is triggered by a flag on the output.
@rodw -
"nontrivial" = not going to attempt this, but thanks for the reminder. Not a programmer; maybe some day.
@Andy -
I don't want the A-axis homing automatically with the X/Y/Z. I tend to leave a trunnion table on it and there may be interference or a setup on it that needs to be broken down or adjusted before 360 rotation (i.e. tall part that would smack the table at 180 degrees). But you've prompted me to read the INI file homing section and double-check the basics...
Sanity check...
Can anyone think of a scenario - user error or hardware failure - that results in Something Very Bad happening? (Other than homing with a tall part on the trunnion, of course, but I'd deserve that one)
@JPL
Yes, it's a 2098-DSD-010X (indexing). Was not aware that only the X models had home to sensor, fwd/back to marker. Although I did find out the sercos models can have the sercos interface disabled which opens up additional IO.
Should be easy enough to adjust the motor-drive coupling to get the index pulse half a rotation from the proxy home switch trigger point. The whole thing is based on a 50:1 harmonic drive and the proxy is triggered by a flag on the output.
@rodw -
"nontrivial" = not going to attempt this, but thanks for the reminder. Not a programmer; maybe some day.
@Andy -
I don't want the A-axis homing automatically with the X/Y/Z. I tend to leave a trunnion table on it and there may be interference or a setup on it that needs to be broken down or adjusted before 360 rotation (i.e. tall part that would smack the table at 180 degrees). But you've prompted me to read the INI file homing section and double-check the basics...
Sanity check...
- Homing proxy only connected to drive
- Drive input "Start homing" connected to LCNC output
- net A-HOMED <= joint.4.homed
- net A-HOMED => hm2.something.7i76.output-nn
- INI file
- A-axis set to immediate homing
- HOME_SEQUENCE = (blank) so homing is not part of the X/Y/Z sequence
- Home offset, if any, is programmed in drive (Offset Move Distance in A-B speak)
- LCNC zeros the DRO/offsets when the home-A is commanded, and the drive then goes through the homing sequence. If there's a homing error the drive faults, but LCNC doesn't know anything except fault/no-fault.
Can anyone think of a scenario - user error or hardware failure - that results in Something Very Bad happening? (Other than homing with a tall part on the trunnion, of course, but I'd deserve that one)
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19876
- Thank you received: 4642
10 Jan 2023 23:42 #261508
by andypugh
Replied by andypugh on topic External homing (in drives)?
I think that sounds pretty much right, though there may be details to be ironed out.
The following user(s) said Thank You: spumco
Please Log in or Create an account to join the conversation.
- DanyD
- Offline
- New Member
-

Less
More
- Posts: 1
- Thank you received: 2
30 Jan 2023 15:59 - 30 Jan 2023 19:29 #263243
by DanyD
Replied by DanyD on topic External homing (in drives)?
I made a custom homing component for homing Ultra 3000 drive based on the example provided in linuxcnc.I bench tested it with my drive (2098-DSD-010-SE) and using "To Sensor/Back to Marker" and it's working fine.Linuxcnc wait for the drive to finish homing before moving to the next drive.
Last edit: 30 Jan 2023 19:29 by DanyD.
The following user(s) said Thank You: JPL, spumco
Please Log in or Create an account to join the conversation.
Time to create page: 0.150 seconds