Need Help in Kinamatics of Small DIY 6dof robotic arm.
- amanker
- Offline
- Premium Member
-

Less
More
- Posts: 119
- Thank you received: 2
27 Oct 2025 12:25 #337277
by amanker
Need Help in Kinamatics of Small DIY 6dof robotic arm. was created by amanker
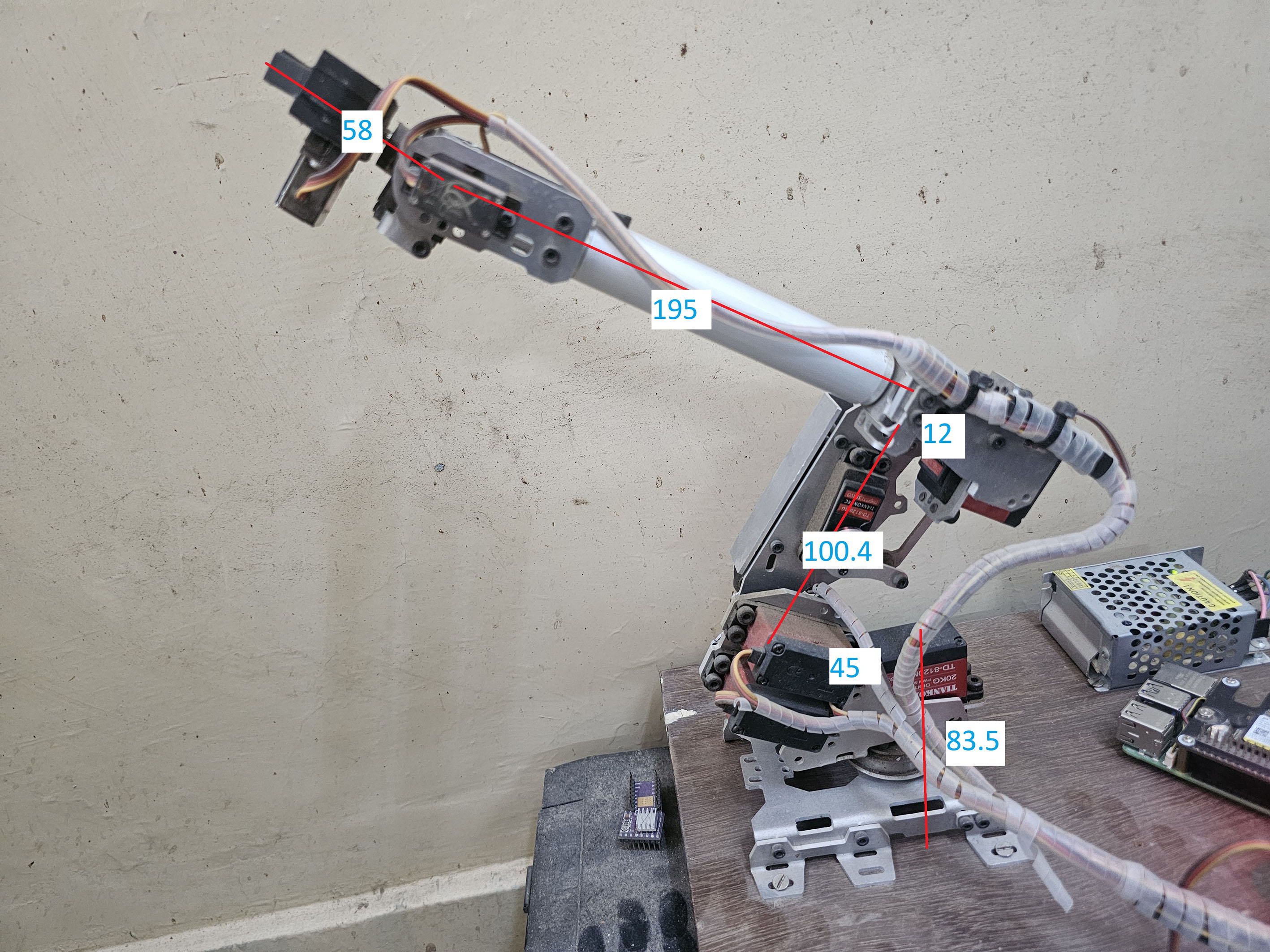
I have configured and installed LinuxCNC on RPI5 and I can control individual joint of robotic arm using trivkins. Using PCA9685 as PWM servo controller. Its work good. But I am strugling to get its kinamatic working. Here is photo of my arm with measurements.
Here is photo of My robotic arm
Here are the pin values I used in genserkins
Here is photo of My robotic arm
Here are the pin values I used in genserkins
setp genserkins.A-0 0
setp genserkins.ALPHA-0 0
setp genserkins.D-0 83.5
setp genserkins.A-1 45
setp genserkins.ALPHA-1 -1.570796327
setp genserkins.D-1 0
setp genserkins.A-2 100.4
setp genserkins.ALPHA-2 0
setp genserkins.D-2 0
setp genserkins.A-3 12
setp genserkins.ALPHA-3 -1.570796327
setp genserkins.D-3 195
setp genserkins.A-4 0
setp genserkins.ALPHA-4 1.570796327
setp genserkins.D-4 0
setp genserkins.A-5 0
setp genserkins.ALPHA-5 -1.570796327
setp genserkins.D-5 58Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4741
- Thank you received: 2125
27 Oct 2025 15:51 #337287
by Aciera
Replied by Aciera on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
There is documentation on how to set up genserkins:
www.linuxcnc.org/docs/stable/html/motion/dh-parameters.html
I can't quite tell from the picture how many joints your arm has but genserkins will only work for manipulators with 6 joints.
www.linuxcnc.org/docs/stable/html/motion/dh-parameters.html
I can't quite tell from the picture how many joints your arm has but genserkins will only work for manipulators with 6 joints.
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 2
27 Oct 2025 17:35 #337295
by amanker
Replied by amanker on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
I have read all documents and tried to understand DH parameters and how kinamatics works. And read the documents many times to have good grap of the subject. I tried my best to explain geometry of my DIY arm.
I am attaching photo explaining more about geometry of arm.
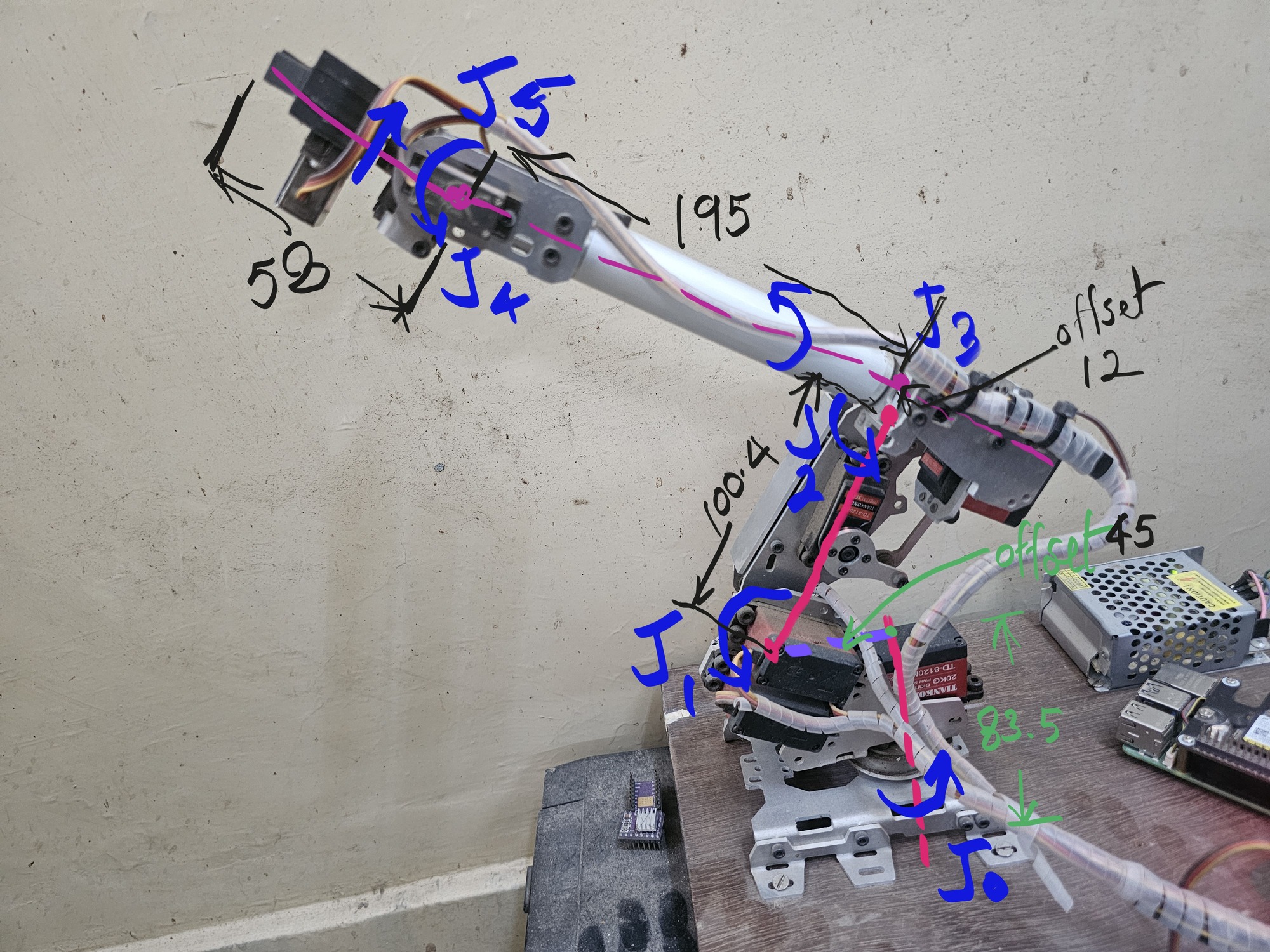
I hope this might better explain geometry of robotic arm.
I am attaching photo explaining more about geometry of arm.
I hope this might better explain geometry of robotic arm.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4741
- Thank you received: 2125
27 Oct 2025 17:49 #337298
by Aciera
Replied by Aciera on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
With all joints in the zero position does the arm point down towards the floor as shown in the documentation?
Maybe you could elaborate a bit on what isn't working.
Maybe you could elaborate a bit on what isn't working.
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 2
27 Oct 2025 18:14 #337300
by amanker
Replied by amanker on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
It's giving kinamaticsInverse failed error. As per documents joints can't have offset values. So to align J1 and J2 these must be in line, arm j1-j2 should be horizontal to give offset values zero. But practically I can't make arm in this position.
Please Log in or Create an account to join the conversation.
- heaven
- Offline
- Junior Member
-

Less
More
- Posts: 34
- Thank you received: 3
28 Oct 2025 03:29 #337320
by heaven
Replied by heaven on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
Maybe you are in singularities, try another homing position
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 2
28 Oct 2025 04:14 #337323
by amanker
Replied by amanker on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
I want to know did I used correct values for genserkins pins according to my geometry
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4741
- Thank you received: 2125
28 Oct 2025 07:09 #337328
by Aciera
Replied by Aciera on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
1. I don't see anything obviously wrong with your DH parameters
2. I would agree with @heaven that you are in a singular position. Which will lead to the inverse kinematics failing. In your pictures j5 is collinear with j3. Trying a different start position for j4 should help.
2. I would agree with @heaven that you are in a singular position. Which will lead to the inverse kinematics failing. In your pictures j5 is collinear with j3. Trying a different start position for j4 should help.
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 2
28 Oct 2025 07:39 - 28 Oct 2025 07:41 #337332
by amanker
Replied by amanker on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
Thanks @Aciera
Finally got it working. Added Home Offset and Home Values to Joint_1 since it was not aligned as in documents and I cant give my arm that postion due to its hardware limits. So Accordingly defined Home and HomeOffset. and Small offset to J2 so that I remain horizontal. And minor offsets to J4. and Assiged Home location of J4 so that it remains vertical.
Thanks a lot.
Yes as @Aciera mentioned DH parameters are good.
Finally got it working. Added Home Offset and Home Values to Joint_1 since it was not aligned as in documents and I cant give my arm that postion due to its hardware limits. So Accordingly defined Home and HomeOffset. and Small offset to J2 so that I remain horizontal. And minor offsets to J4. and Assiged Home location of J4 so that it remains vertical.
Thanks a lot.
Yes as @Aciera mentioned DH parameters are good.
Last edit: 28 Oct 2025 07:41 by amanker.
Please Log in or Create an account to join the conversation.
Time to create page: 0.265 seconds