- Hardware & Machines
- CNC Machines
- Milling Machines
- SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
08 Oct 2020 13:24 - 08 Oct 2020 16:55 #185352
by new2linux
SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8 was created by new2linux
My I have a second opinion about my approach to this project. This is a 40 VDC; "brush type of motor" off of a 2 axis mill. I have the data sheet for the major components. As I read the data sheet the drive should be set to "Current Mode" so: SW1=OFF; SW2=OFF; SW3=ON; & SW4=OFF
In addition: POT1 = FULL CCW
POT2 = FULL CW (This is to insure the full 6 amps (max. continuous current of drive) is set, as per motor data of 6.25 amp)
POT3=
POT4=
(Page 5 of 9)
All assistance is warmly welcomed,
Many thanks,
Edit:I should set up the halscope axis x (and the y axis) as per channel 1 joint.N.motor-pos-cmd & channel 2 joint.N.f-error? Compare as per tommylight post? Currently the green lights are on, no motion yet, the motors do not appear to receive power.
Edit: I reread JR1050 comment " The encoder velocity mode on AMC amps is very handy for dc motors with out tachs, like yellow cap Fanucs.... " Should I set this to Tachometer Velocity mode, SW1 & SW3 = OFF?
In addition: POT1 = FULL CCW
POT2 = FULL CW (This is to insure the full 6 amps (max. continuous current of drive) is set, as per motor data of 6.25 amp)
POT3=
POT4=
(Page 5 of 9)
All assistance is warmly welcomed,
Many thanks,
Edit:I should set up the halscope axis x (and the y axis) as per channel 1 joint.N.motor-pos-cmd & channel 2 joint.N.f-error? Compare as per tommylight post? Currently the green lights are on, no motion yet, the motors do not appear to receive power.
Edit: I reread JR1050 comment " The encoder velocity mode on AMC amps is very handy for dc motors with out tachs, like yellow cap Fanucs.... " Should I set this to Tachometer Velocity mode, SW1 & SW3 = OFF?
Last edit: 08 Oct 2020 16:55 by new2linux. Reason: POT2; full CW is max current. add questions
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 Oct 2020 17:23 #185368
by new2linux
Replied by new2linux on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Set up in to Tachometer Velocity mode, SW1, SW2, SW3 & SW4 = OFF.
POT1 = FULL CCW
POT2 = FULL CW (This is to insure the full 6 amps (max. continuous current of drive) is set, as per motor data of 6.25 amp)
POT3= FULL CW
POT4=FULL CW
The x axis runs, as soon as the e stop is released. The belts are off, the speed of motor is not excessive. I have PID settings from prior install. Is there a way to adjust the motor at stop? Or are the drives in need of repair?
many thanks
POT1 = FULL CCW
POT2 = FULL CW (This is to insure the full 6 amps (max. continuous current of drive) is set, as per motor data of 6.25 amp)
POT3= FULL CW
POT4=FULL CW
The x axis runs, as soon as the e stop is released. The belts are off, the speed of motor is not excessive. I have PID settings from prior install. Is there a way to adjust the motor at stop? Or are the drives in need of repair?
many thanks
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-
Less
More
- Posts: 4747
- Thank you received: 1454
09 Oct 2020 14:05 #185464
by Todd Zuercher
Replied by Todd Zuercher on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Do your motors have a tachometer? On your other thread you posted a spec sheet for the motor, but it made no mention of what feed back options were installed. The older 12A8 drives, do not have provisions to use encoder feedback. If your motors do not have tachs then you might be better off using the newer digital drive you bought and connecting the encoder feed back to them. What sort of encoders do you have?
If you are set on using the older style drive and have no feedback that can be use with it, probably the best mode to use would be the IR Compensation mode (or Voltage mode). It might not work as good as having real feedback, but should be easier to tune than pure Current (Torque) mode.
What kind of drive was original? Had it failed? How was it set up? If they were the same you might be able to copy pot settings and transplant tuning resistors. But that likely won't work if they are not exactly the same.
If you are set on using the older style drive and have no feedback that can be use with it, probably the best mode to use would be the IR Compensation mode (or Voltage mode). It might not work as good as having real feedback, but should be easier to tune than pure Current (Torque) mode.
What kind of drive was original? Had it failed? How was it set up? If they were the same you might be able to copy pot settings and transplant tuning resistors. But that likely won't work if they are not exactly the same.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
09 Oct 2020 14:28 #185469
by new2linux
Replied by new2linux on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Todd, Many thanks!! The original drive after the prototrak plus was a 12a8, I believe it was setup using "back EMF" in I think "current mode". What I recall about the encoders is that they were 2000 counts/rev. I will reach out to see if I can get additional info on the encoders.
As I read your most recent post " but should be easier to tune than pure Current (Torque) mode"; is current mode and torque mode one and the same or very close?
I will put the time in to tune the newer digital drives, if the required components are all working. I like knowing the drives are new, with all that comes with that. If the mission is to get the "wave" flatten out as best as possible I will work on that.
Many thanks
As I read your most recent post " but should be easier to tune than pure Current (Torque) mode"; is current mode and torque mode one and the same or very close?
I will put the time in to tune the newer digital drives, if the required components are all working. I like knowing the drives are new, with all that comes with that. If the mission is to get the "wave" flatten out as best as possible I will work on that.
Many thanks
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4747
- Thank you received: 1454
09 Oct 2020 14:36 #185471
by Todd Zuercher
Replied by Todd Zuercher on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Yes, current and torque modes are the same. The IR mode is using the motors back EMF. Voltage mode is similar but doesn't compensate for motor load.
Do you know if your encoders are differential or single ended wiring. I think the Accent drive might only accept a single ended signal. Sometimes it is a little hard to tell exactly what you have from the documentation because it can cover multiple options on multiple different drives. The drive you have may not have all of the features mentioned in the docs.
Do you know if your encoders are differential or single ended wiring. I think the Accent drive might only accept a single ended signal. Sometimes it is a little hard to tell exactly what you have from the documentation because it can cover multiple options on multiple different drives. The drive you have may not have all of the features mentioned in the docs.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
09 Oct 2020 14:43 - 09 Oct 2020 15:24 #185475
by new2linux
Replied by new2linux on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Todd, Many, many thanks! Is there a way to test or look at the encoders to tell what they are? I just sent email to asking about encoder specification, being this was to a specific application I would think that there are but few features. It will take time if they respond.
Thanks for the current and torque modes are the same, for my piece of mind.
Edit: The motors and encoders are from like 1983 year. Response from encoder/motor people is that this is proprietary, would not clarify "differential or single ended wiring.
Thanks for the current and torque modes are the same, for my piece of mind.
Edit: The motors and encoders are from like 1983 year. Response from encoder/motor people is that this is proprietary, would not clarify "differential or single ended wiring.
Last edit: 09 Oct 2020 15:24 by new2linux. Reason: 1983
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4747
- Thank you received: 1454
09 Oct 2020 14:54 #185477
by Todd Zuercher
Replied by Todd Zuercher on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
You had to know this when you connected them to the Mesa card. How many wires did you hook up there? Was there an A, /A, B, and /B plus index and power wires or just A and B with index and power wires? (Index is optional.) If it were the 2nd you would have had to move the encoder jumpers on the 7i77.
If the encoders are differential. Hopefully Peter (or someone else) might chime in on the best way to connect the encoder signal to the single ended inputs on the drive, because I'm not sure.
If the encoders are differential. Hopefully Peter (or someone else) might chime in on the best way to connect the encoder signal to the single ended inputs on the drive, because I'm not sure.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
09 Oct 2020 15:38 - 09 Oct 2020 18:05 #185483
by new2linux
Replied by new2linux on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Todd, Many thanks!! I believe it is "just A and B with index and power wires", check the pic, yes the pic success these pics were cropped. One pic shows the 7i77 card. The one pic looking at the encoder shows what looks to be a spade connector needs to go to ground. This is 1st time having this end cap off.
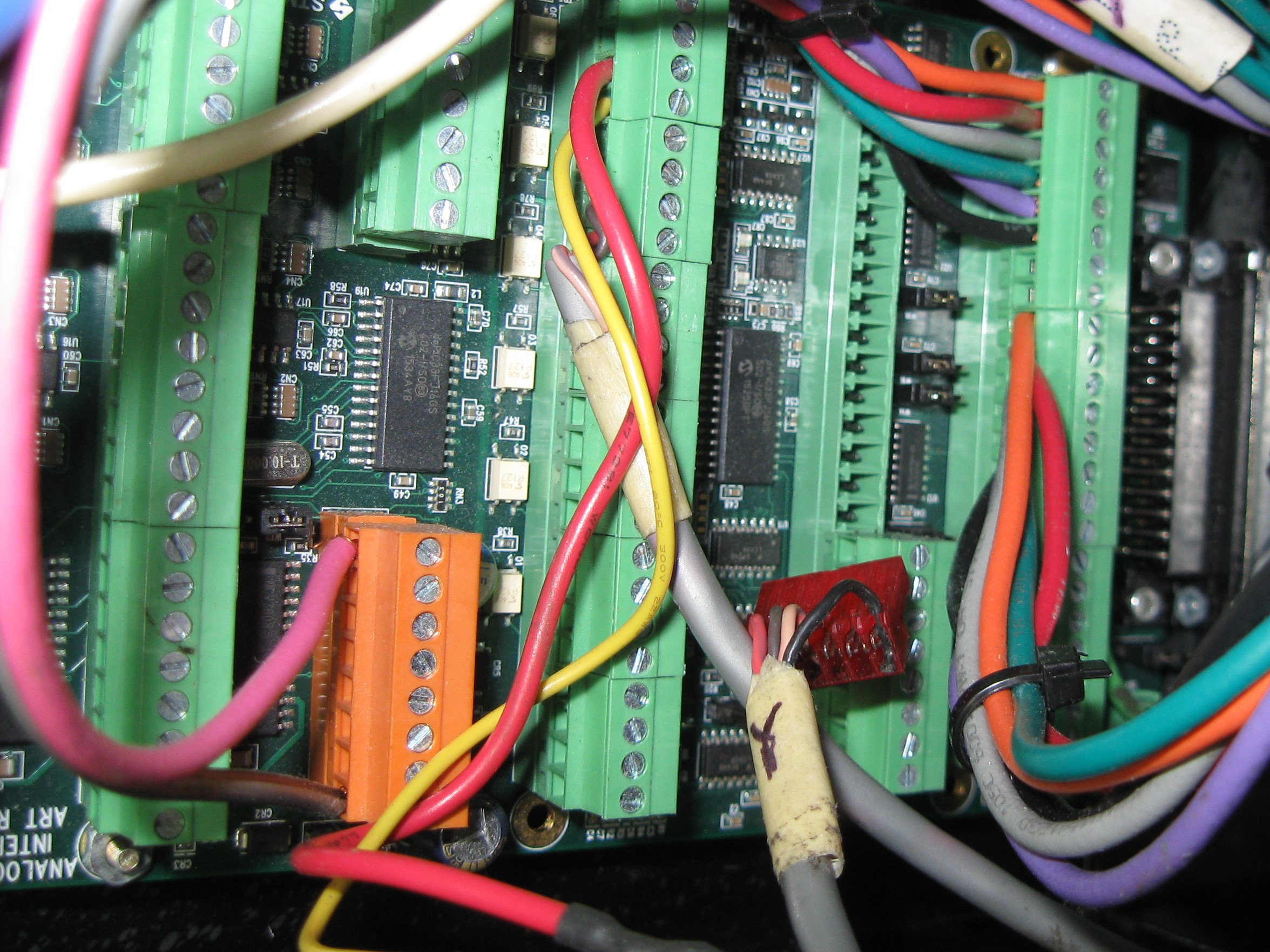
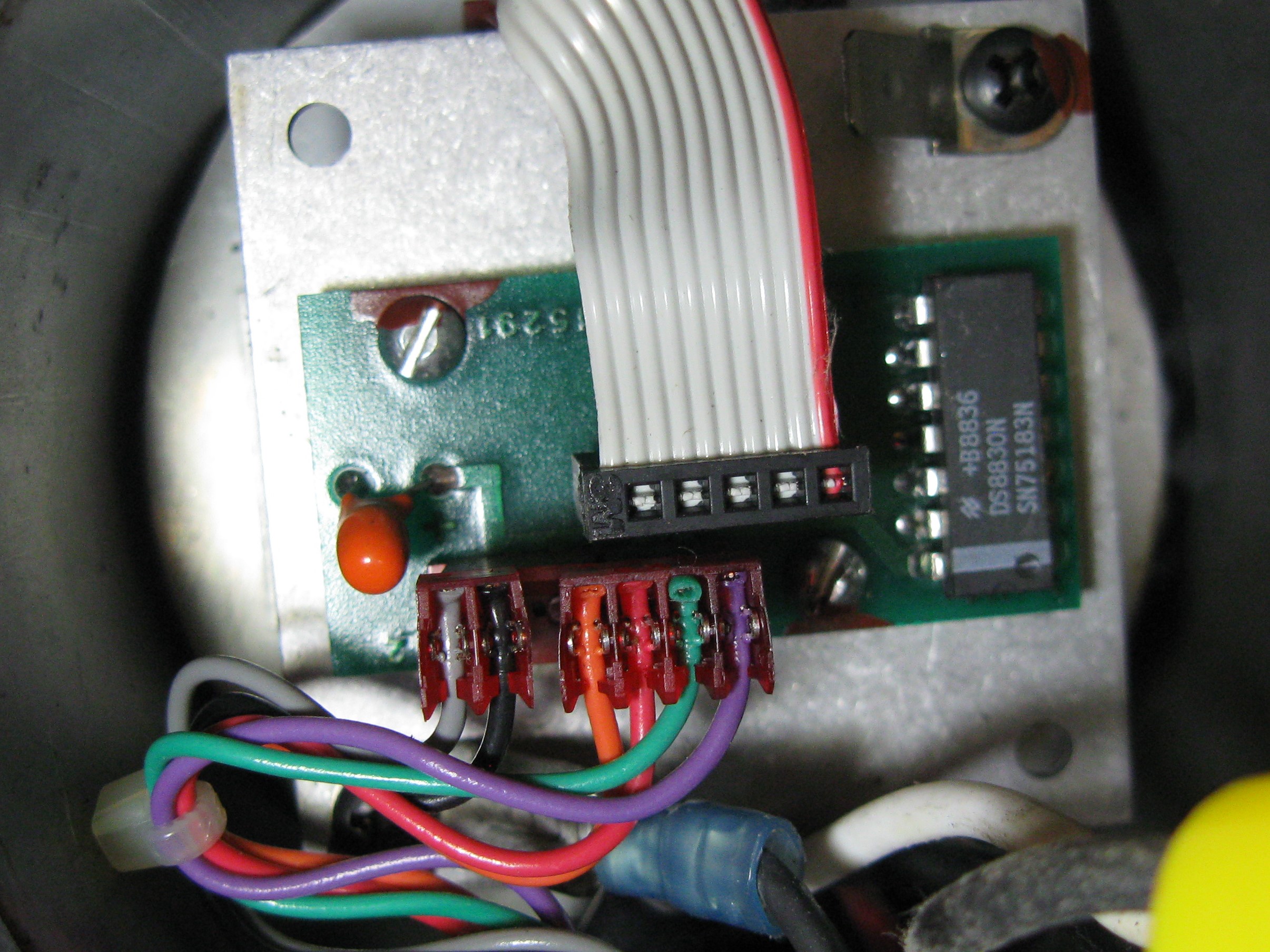
Attachments:
Last edit: 09 Oct 2020 18:05 by new2linux. Reason: pic size exceded did not work, will try again
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4747
- Thank you received: 1454
09 Oct 2020 16:14 #185488
by Todd Zuercher
Replied by Todd Zuercher on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
I don't recall seeing any photos of your encoders or their wiring. (There were a couple images of your motor labels on the other thread, but no encoders.)
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4747
- Thank you received: 1454
09 Oct 2020 20:43 #185505
by Todd Zuercher
Replied by Todd Zuercher on topic SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Ok, according to how you have it connected to the 7i77 the encoder is differential without index.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- SouthWestern Industries Prototrak servo drive replacement with A-M-C 12A8
Time to create page: 0.304 seconds