Using Kinco MD80 servos with integrated drivers via Modbus
- gertjn
- Offline
- New Member
-

Less
More
- Posts: 1
- Thank you received: 0
31 May 2022 13:13 #244285
by gertjn
Using Kinco MD80 servos with integrated drivers via Modbus was created by gertjn
Hi there,
I am looking into the possibilities of building a CNC machine and running it with LinuxCNC. I happen to have a few Kinco servo motors from a previous project and would like to know if it would be possible to use these.
They are MD80 750 watt, see link here: www.kincoautomation.com/products/servo/Servo_Systems/MD80-075/
As said, they have integrated drivers. The motors I have can run on Modbus RTU / RS485 communication.
Can I somehow connect them to the PC parallel port, and if so, how can I tell linuxCNC which protocol to use? Or should I use a Mesa card (though the ones I found state to work with analog servos, no digital bus communication).
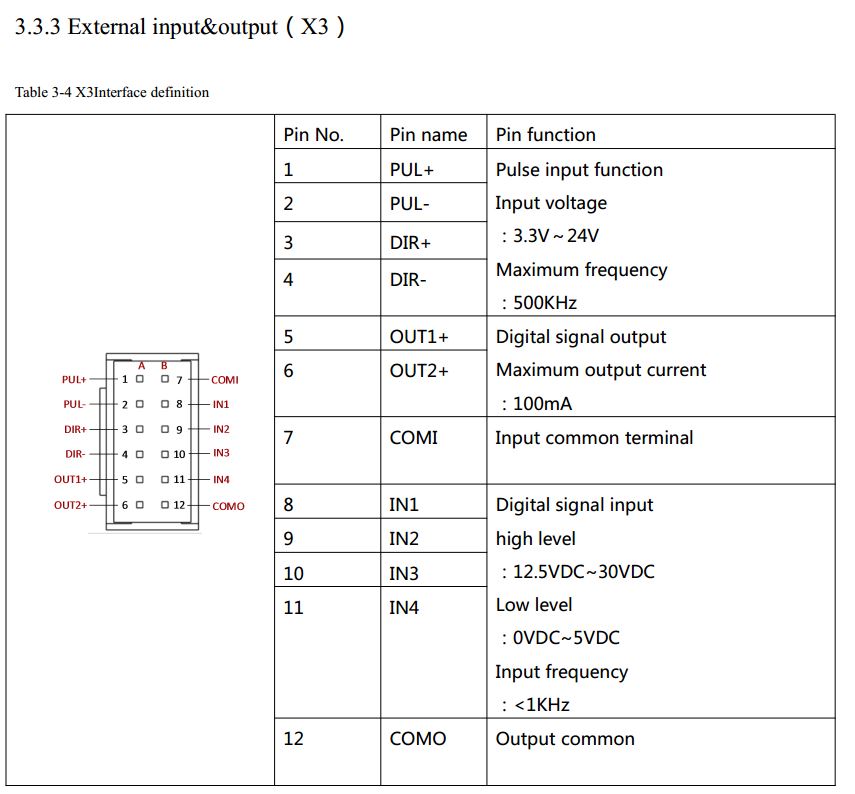
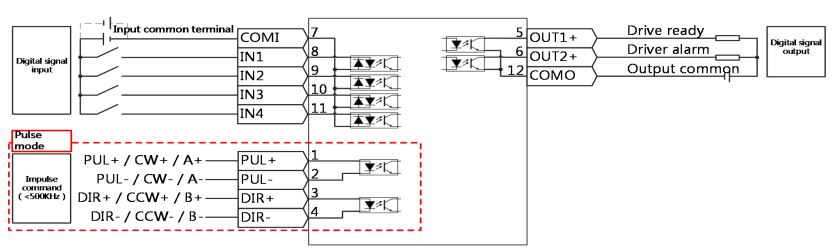
Otherwise, there is also the I/O connector on the motor on which pulse / direction pins are available, see attached images. But I understood using step/dir is a 'inferior' method of driving the motors compared to what servos can do, is that right?
Curious what you guys think!
Gert Jan
I am looking into the possibilities of building a CNC machine and running it with LinuxCNC. I happen to have a few Kinco servo motors from a previous project and would like to know if it would be possible to use these.
They are MD80 750 watt, see link here: www.kincoautomation.com/products/servo/Servo_Systems/MD80-075/
As said, they have integrated drivers. The motors I have can run on Modbus RTU / RS485 communication.
Can I somehow connect them to the PC parallel port, and if so, how can I tell linuxCNC which protocol to use? Or should I use a Mesa card (though the ones I found state to work with analog servos, no digital bus communication).
Otherwise, there is also the I/O connector on the motor on which pulse / direction pins are available, see attached images. But I understood using step/dir is a 'inferior' method of driving the motors compared to what servos can do, is that right?
Curious what you guys think!
Gert Jan
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21606
- Thank you received: 7380
31 May 2022 13:22 #244287
by tommylight
Replied by tommylight on topic Using Kinco MD80 servos with integrated drivers via Modbus
Step/dir is all good, not sure what it is inferior to, but it is the most widely used control type, by a large margin.
And LinuxCNC can do step/dir in velocity mode, so you can add linear scales, or use encoders, and in some cases use the same encoders that are on the servo systems, so the possibilities are plenty.
ModBus is, as far as i know, not "real time, while step/dir is, it just depends on how good the servos are.
Case in point, you have servo drives, pretty good by the looks of it, and they do have step/dir control, if it was inferior to anything it would not be there.
And LinuxCNC can do step/dir in velocity mode, so you can add linear scales, or use encoders, and in some cases use the same encoders that are on the servo systems, so the possibilities are plenty.
ModBus is, as far as i know, not "real time, while step/dir is, it just depends on how good the servos are.
Case in point, you have servo drives, pretty good by the looks of it, and they do have step/dir control, if it was inferior to anything it would not be there.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19860
- Thank you received: 4636
02 Jun 2022 10:00 #244435
by andypugh
Replied by andypugh on topic Using Kinco MD80 servos with integrated drivers via Modbus
Modbus can be realtime, but I don't think that LinuxCNC curently has any realtime drivers.
If I wanted to run Modbus servos I would write a driver for the Mesa UART. It's shouldn't be particularly difficult for one particular hardware set. A general-purpose Modbus for Mesa would be a much bigger project (so I haven't started it)
For the moment I would say that running parallel port and step-direction would be the cheapest and quickest way to get started.
If I wanted to run Modbus servos I would write a driver for the Mesa UART. It's shouldn't be particularly difficult for one particular hardware set. A general-purpose Modbus for Mesa would be a much bigger project (so I haven't started it)
For the moment I would say that running parallel port and step-direction would be the cheapest and quickest way to get started.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Moderators: PCW, jmelson
Time to create page: 0.142 seconds