Spindle servo motor conversion with encoder questions
- JohnnyCNC
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 570
- Thank you received: 111
01 Apr 2018 02:10 - 01 Apr 2018 02:12 #108199
by JohnnyCNC
Spindle servo motor conversion with encoder questions was created by JohnnyCNC
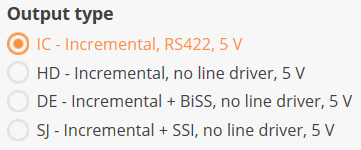
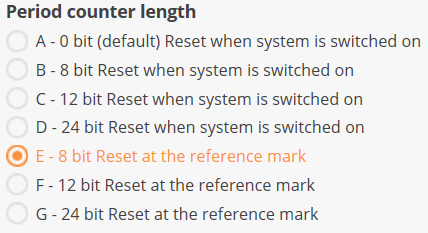
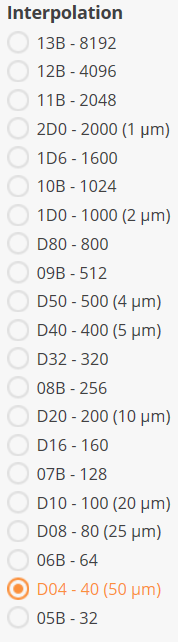
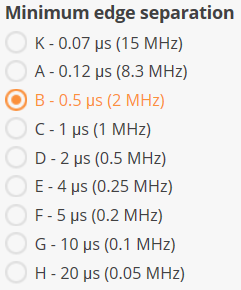
I need some help here guys. I've posted all of the info I have gathered below for reference I’m working on upgrading the motor on my mill using the DMM DYN4 1800 watt servo motor. I am also going to switch to a belt drive with a 1:1.8 ratio (motor:spindle). Based on the motor rated speed (1500) and max speed(3000) I will have a max spindle speed of 5400rpm with 1.34 HP at the spindle What I’m struggling with is figuring out how to get an encoder signal to do rigid tapping. I THINK the options I have are to use the quadrature output of the servo and use the optical sensor I currently have on the spindle as the index pulse. This is a cheaper option but may not be a good option. The other option would be to use a product from RLS (www.rls.si/eng/products/rotary-magnetic-...adial-magnetic-rings) which is a magnetic ring that I can mount on the spindle and mount the read head next to it. The problem is they ask questions in their configurator that I’m not sure how to answer. Below you will see the options in the configurator with my guess choices selected. I thought about contacting their support but I’m not sure I would have the answers to the questions they might have about the requirements/capabilities of the 7i76 or LinuxCNC. Based on the Mesa manual I see that I cannot use count rate greater than 10 Mhz and I assume that would be cpr x rpm, or would it be ppr x rpm. The four options that I am really struggling with are Output Type, Period Counter Length, Interpolation, and Minimum Edge Separation.
As always.
Thanks
John
I have a Mesa 7i76 and this is the data from the manual
HIGH SPEED ENCODER INPUT
MIN MAX NOTES
INPUT COMMON MODE RANGE -7 +12 Volts
INPUT TTL MODE THRESHOLD 1.4 1.8 Volts
DIFFERENTIAL MODE IMPEDANCE 131 135 Ohms
COUNT RATE ---- 10 MHz
Servo motor info:
DMM DYN4 Servo Kit 1800W
• 4-wire high speed serial encoder bus, with 8-bit security code
• DMMDRV4© graphical interface, Adaptive Tuning Technology
• Single/Three-Phase 110~240VAC ± 10% 50/60Hz input
• Industry standard Position, Velocity, Torque servo modes
• Serial [UART,SPI], Pulse/Sign, CW/CCW, A/B Quadrature, and Analog Command
• A/B/Z Quadrature incremental encoder output
• Motor Current, Absolute Position, Position Error Monitor Outputs
• RS485/RS232 networking
• Integrated Point to Point S-curve motion, linear & circular coordinated motion
Rotary encoder info:
RoLin™ rotary incremental magnetic encoder system
The RoLinTM component level encoder system consists of an RLM read head and a magnetized ring. The actuator is a periodically magnetized ring with a pole length of 2 mm. Radial or axial reading of the ring is possible. The read head can ride at up to 0.4 mm from the ring's surface.
State of the art position sensing assures highly repeatable position measurement under wide installation tolerances and temperature range.
The electronics inside the read head enable high interpolation rates up to 13 bits and fault monitoring. The incremental outputs are re-timed to the chosen minimal edge separation time (from 0.12 µs). The position information is output in incremental quadrature format with the option of a unique or periodic reference mark (every pole).
A wide range of resolutions to 753,664 cpr is available. The maximum speed depends on the chosen resolution and minimum edge separation time, to 4 m/s at 1 µm and to 40 m/s at 10 µm.
Available output types Digital ABZ: Differential RS422 *, Single ended TTL
As always.
Thanks
John
I have a Mesa 7i76 and this is the data from the manual
HIGH SPEED ENCODER INPUT
MIN MAX NOTES
INPUT COMMON MODE RANGE -7 +12 Volts
INPUT TTL MODE THRESHOLD 1.4 1.8 Volts
DIFFERENTIAL MODE IMPEDANCE 131 135 Ohms
COUNT RATE ---- 10 MHz
Servo motor info:
DMM DYN4 Servo Kit 1800W
• 4-wire high speed serial encoder bus, with 8-bit security code
• DMMDRV4© graphical interface, Adaptive Tuning Technology
• Single/Three-Phase 110~240VAC ± 10% 50/60Hz input
• Industry standard Position, Velocity, Torque servo modes
• Serial [UART,SPI], Pulse/Sign, CW/CCW, A/B Quadrature, and Analog Command
• A/B/Z Quadrature incremental encoder output
• Motor Current, Absolute Position, Position Error Monitor Outputs
• RS485/RS232 networking
• Integrated Point to Point S-curve motion, linear & circular coordinated motion
Rotary encoder info:
RoLin™ rotary incremental magnetic encoder system
The RoLinTM component level encoder system consists of an RLM read head and a magnetized ring. The actuator is a periodically magnetized ring with a pole length of 2 mm. Radial or axial reading of the ring is possible. The read head can ride at up to 0.4 mm from the ring's surface.
State of the art position sensing assures highly repeatable position measurement under wide installation tolerances and temperature range.
The electronics inside the read head enable high interpolation rates up to 13 bits and fault monitoring. The incremental outputs are re-timed to the chosen minimal edge separation time (from 0.12 µs). The position information is output in incremental quadrature format with the option of a unique or periodic reference mark (every pole).
A wide range of resolutions to 753,664 cpr is available. The maximum speed depends on the chosen resolution and minimum edge separation time, to 4 m/s at 1 µm and to 40 m/s at 10 µm.
Available output types Digital ABZ: Differential RS422 *, Single ended TTL
Last edit: 01 Apr 2018 02:12 by JohnnyCNC.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19861
- Thank you received: 4636
03 Apr 2018 11:57 #108295
by andypugh
Replied by andypugh on topic Spindle servo motor conversion with encoder questions
Just use the existing opto for index and scale the spindle position feedback to account for the belt ratio. It will work fine and save you expense and trouble.
Please Log in or Create an account to join the conversation.
- JohnnyCNC
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 570
- Thank you received: 111
04 Apr 2018 02:35 #108351
by JohnnyCNC
Replied by JohnnyCNC on topic Spindle servo motor conversion with encoder questions
Thanks Andy. I'll go that route. I can always add the encoder later if I ever have a reason to.
John
John
Please Log in or Create an account to join the conversation.
Time to create page: 0.178 seconds