Analog Servo runs at maximum speed at start
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19876
- Thank you received: 4642
22 Oct 2020 12:09 #186891
by andypugh
Replied by andypugh on topic Analog Servo runs at maximum speed at start
0.8mm during rapids seems OK.
0.3mm at machining speed seems too high.
Is that "0.3m" on Halscope? Note that that would be 0.3m mm. Which would be very good.
0.3mm at machining speed seems too high.
Is that "0.3m" on Halscope? Note that that would be 0.3m mm. Which would be very good.
Please Log in or Create an account to join the conversation.
- aleksamc
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 569
- Thank you received: 67
22 Oct 2020 12:58 #186892
by aleksamc
Replied by aleksamc on topic Analog Servo runs at maximum speed at start
Now I have some new bug that I can't understand.
I configured next axis. It's seems that everything fine. Turned off PC and everything and go to brake. When I come and turned on my configured axes I found that this new axis at start gives ferror 5mm!!!
And it doesn't compensate it. It seems very strange because before it eveithing was fine.
After some time axis try to compensate ferror but it makes jerks to ferror = 0 and back to 5mm.
What it's problem in? It seems that problem goes from linuxcnc because when I disconnect analog output, servo is stopped.
I configured next axis. It's seems that everything fine. Turned off PC and everything and go to brake. When I come and turned on my configured axes I found that this new axis at start gives ferror 5mm!!!
And it doesn't compensate it. It seems very strange because before it eveithing was fine.
After some time axis try to compensate ferror but it makes jerks to ferror = 0 and back to 5mm.
What it's problem in? It seems that problem goes from linuxcnc because when I disconnect analog output, servo is stopped.
Please Log in or Create an account to join the conversation.
- aleksamc
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
22 Oct 2020 13:14 #186895
by aleksamc
Replied by aleksamc on topic Analog Servo runs at maximum speed at start
f-error returned back. CNC works like old lamp TV that needed to heat up to display)))
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
Less
More
- Posts: 17986
- Thank you received: 5278
22 Oct 2020 14:19 #186898
by PCW
Replied by PCW on topic Analog Servo runs at maximum speed at start
Can you post some halscope plots of ferror and velocity?
Please Log in or Create an account to join the conversation.
- aleksamc
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
22 Oct 2020 14:57 - 22 Oct 2020 15:30 #186902
by aleksamc
Replied by aleksamc on topic Analog Servo runs at maximum speed at start
I will post hal scope after this post.
Now I wonder, about such things about homing and velosity. I add my ini file.
Now I have 2 workable axes, X and Y.
1) I configure homing.
For this two axes home_velosity both negative, BUT Y move in negative direction, X moves in positive. Why, I don't understand...
2) Before homing maximum fast move equals 10800( or 10080) but after homing, axes moves with 5000mm/min.
Why I also can't understand. )))
I found that in the project there is two MAX_VELOSITY for each axis. I anderstand previous my questions.
Tomorrow, when I will turn ON PC on cold, I will see how it works and will make screenshots.
Now I wonder, about such things about homing and velosity. I add my ini file.
Now I have 2 workable axes, X and Y.
1) I configure homing.
For this two axes home_velosity both negative, BUT Y move in negative direction, X moves in positive. Why, I don't understand...
2) Before homing maximum fast move equals 10800( or 10080) but after homing, axes moves with 5000mm/min.
Why I also can't understand. )))
I found that in the project there is two MAX_VELOSITY for each axis. I anderstand previous my questions.
Tomorrow, when I will turn ON PC on cold, I will see how it works and will make screenshots.
Attachments:
Last edit: 22 Oct 2020 15:30 by aleksamc. Reason: found solving
Please Log in or Create an account to join the conversation.
- aleksamc
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
23 Oct 2020 12:50 #186999
by aleksamc
Replied by aleksamc on topic Analog Servo runs at maximum speed at start
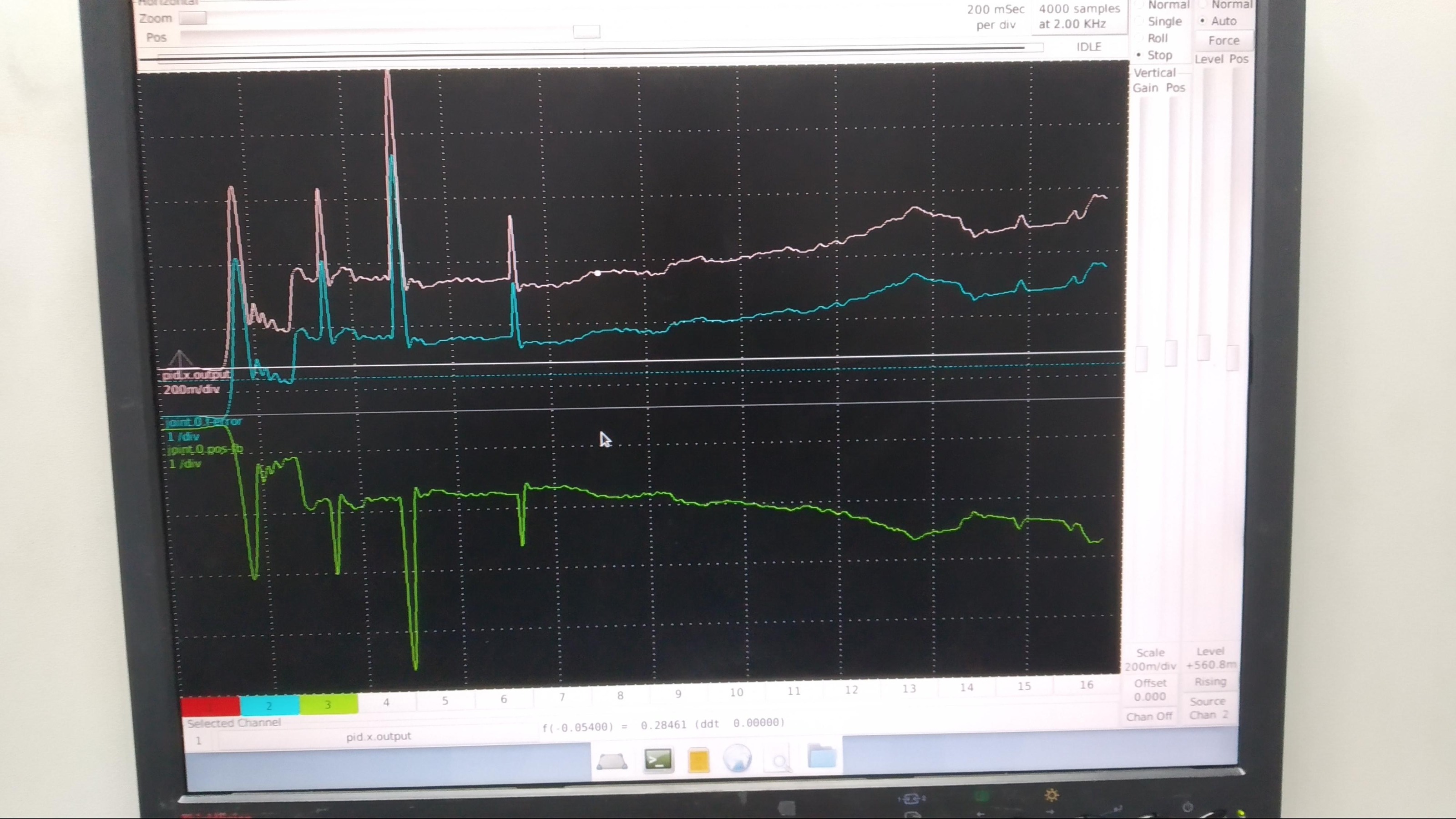
Yesterday, when I finished configurations of axes everything was OK. I tried to jog all axes, configured homing. Everything fine. Here is halscope of axes.
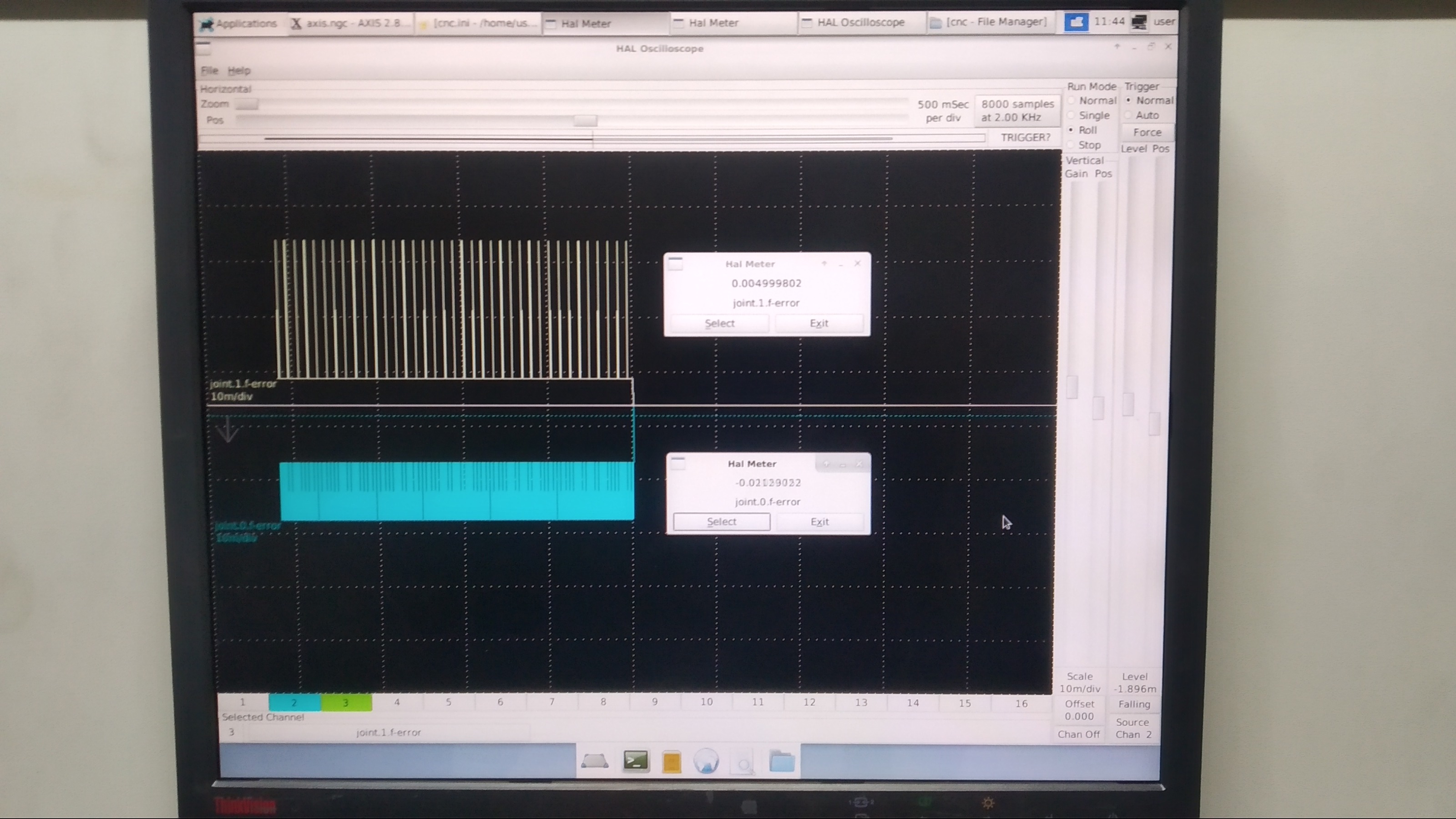
Today all motors are connected mechanicaly, so f-error is configured on low value.
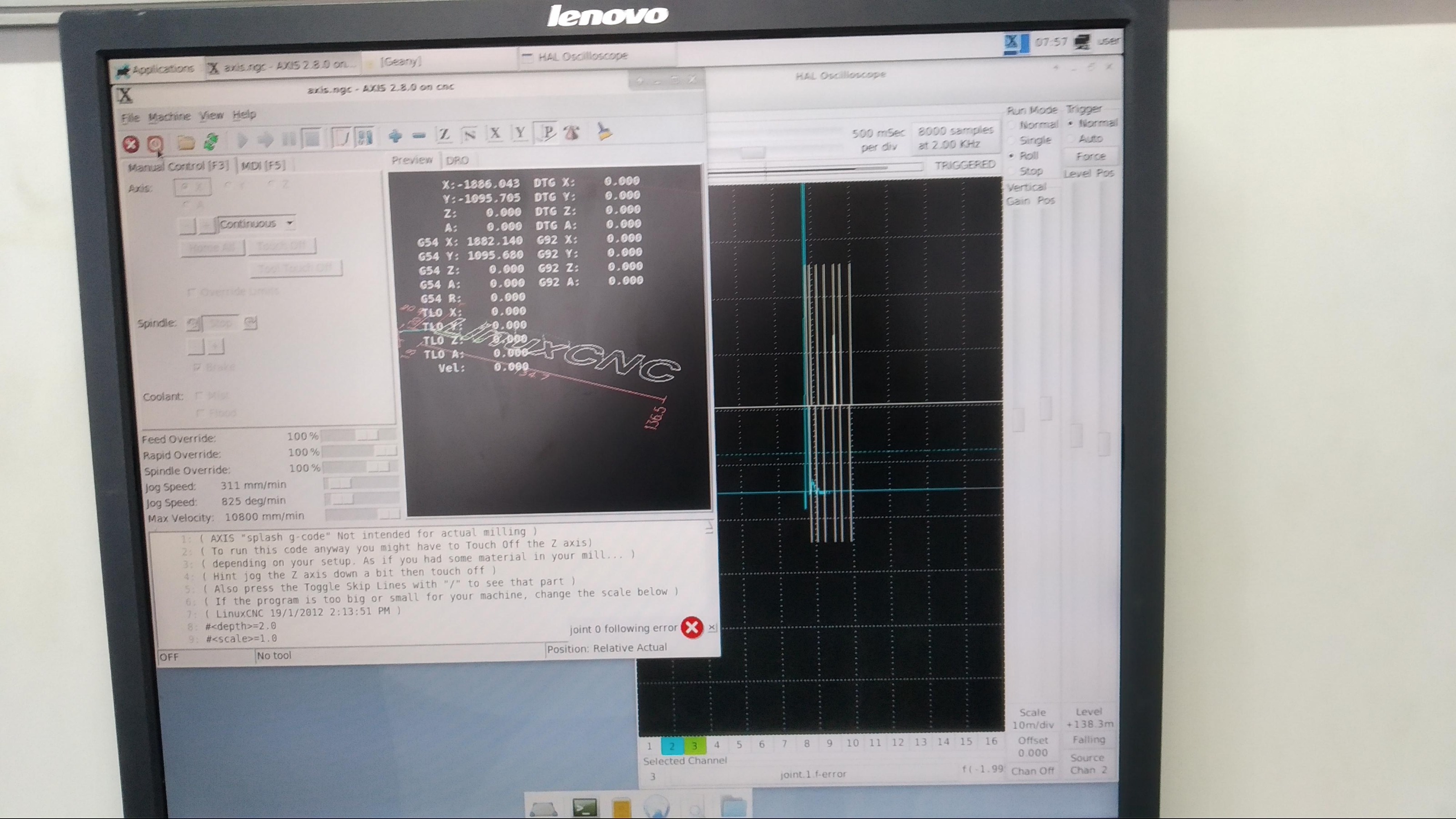
All next photos are my tries to turn linuxcnc. Even with f-error 5mm, I get turn off from axis X (joint 0).
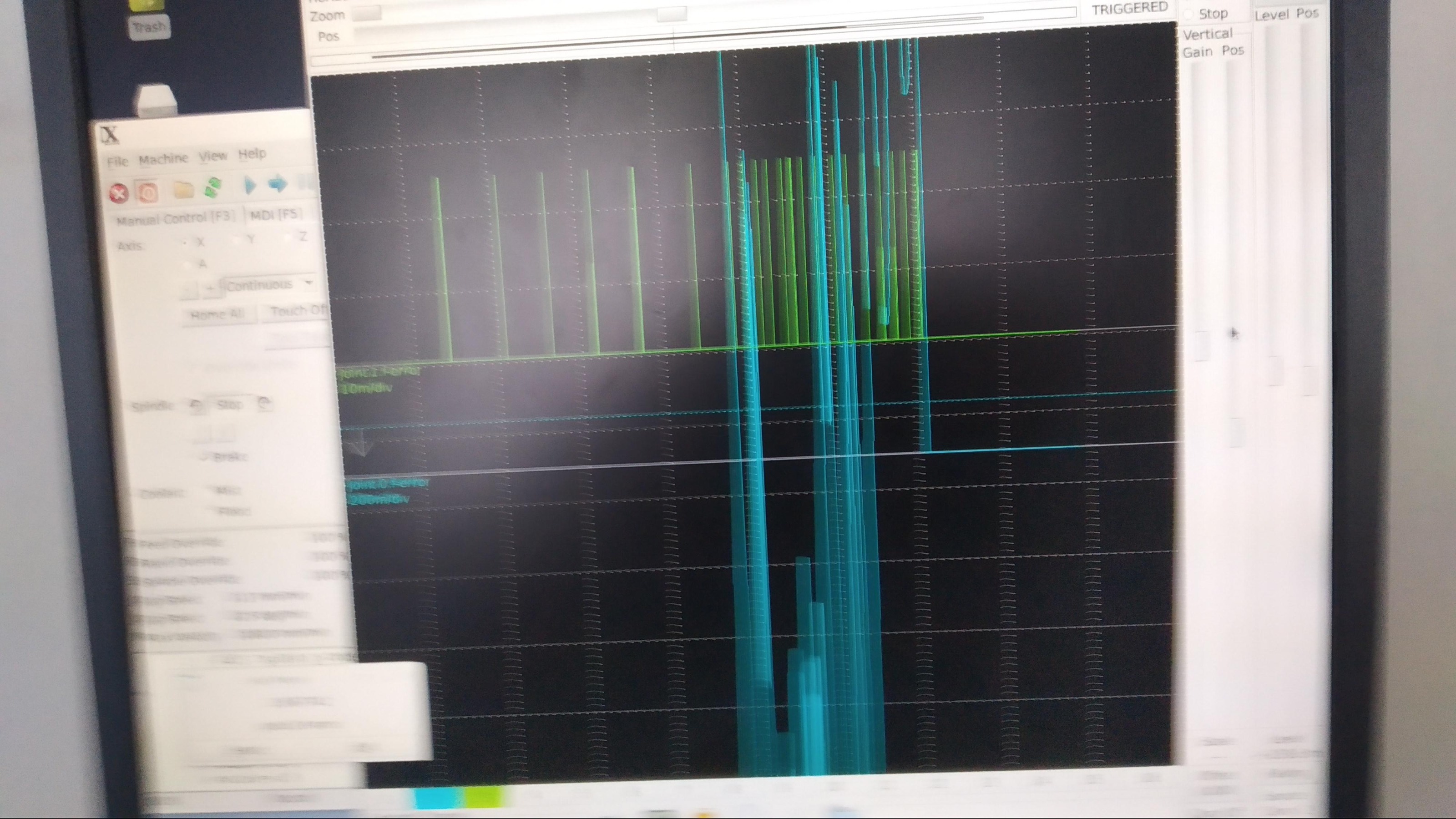
And I must say that machine is also jittering.
As you may see, joint 0 gives big spikes of error.
I also tried when I start decreese P value to 0.05 but it doesn't help. I also tried to change servodrives for this mototrs, first one was 3.7kVA for 22A, I set others 12A, 2.2kVA. Motor is 1,5kVA. Joint 1, where is small motor installed is fine and stable.
When I disconnect analog signal from motor it in stand still position.
My version is that the quality of control position by servodrive depends on ohmic resistance of the motor. When it's cold in the room, here is 12 by celsium, it can't control motor. But when it's turned on, it's heated a little, ohmic resistanse increases and it become controlable.
What your versions? How can I solve this problem? At lease for the start of the motor for standing without movement.
Today all motors are connected mechanicaly, so f-error is configured on low value.
All next photos are my tries to turn linuxcnc. Even with f-error 5mm, I get turn off from axis X (joint 0).
And I must say that machine is also jittering.
As you may see, joint 0 gives big spikes of error.
I also tried when I start decreese P value to 0.05 but it doesn't help. I also tried to change servodrives for this mototrs, first one was 3.7kVA for 22A, I set others 12A, 2.2kVA. Motor is 1,5kVA. Joint 1, where is small motor installed is fine and stable.
When I disconnect analog signal from motor it in stand still position.
My version is that the quality of control position by servodrive depends on ohmic resistance of the motor. When it's cold in the room, here is 12 by celsium, it can't control motor. But when it's turned on, it's heated a little, ohmic resistanse increases and it become controlable.
What your versions? How can I solve this problem? At lease for the start of the motor for standing without movement.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17986
- Thank you received: 5278
23 Oct 2020 14:11 #187002
by PCW
Replied by PCW on topic Analog Servo runs at maximum speed at start
Can you add the feedback position and PID output to the plot?
Its hard to tell where the problem lies without additional data
Its hard to tell where the problem lies without additional data
Please Log in or Create an account to join the conversation.
- aleksamc
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
27 Oct 2020 04:59 #187368
by aleksamc
Replied by aleksamc on topic Analog Servo runs at maximum speed at start
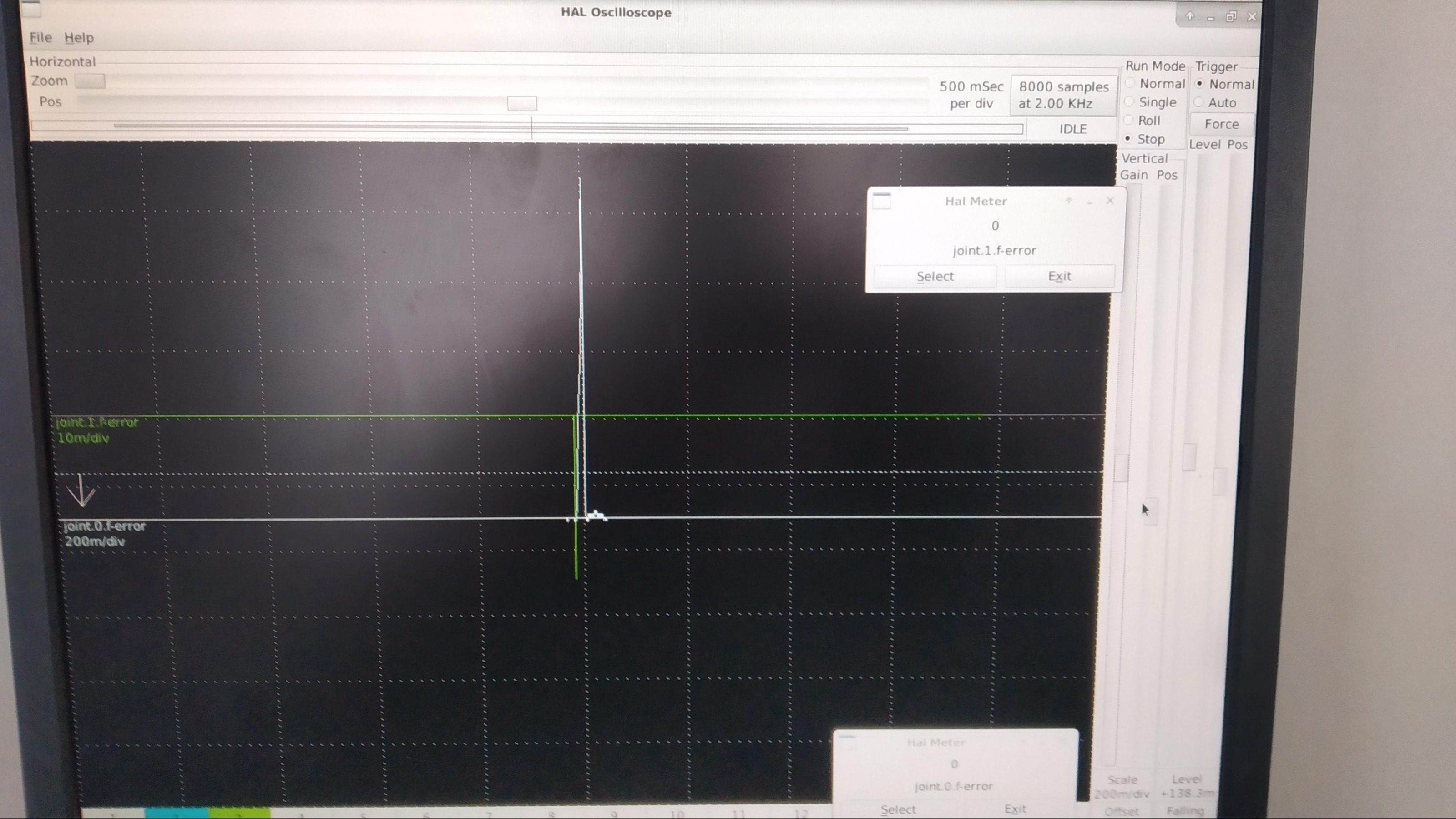
When I started at first I had such transition process
Then I reconfigured axe from start, I decreased BIAS to 0, I suspect that BIAS=0.02, as I had give big problem. I made configuration milder without integral and Derivative parameters and at the end received suvh transitional process in work.
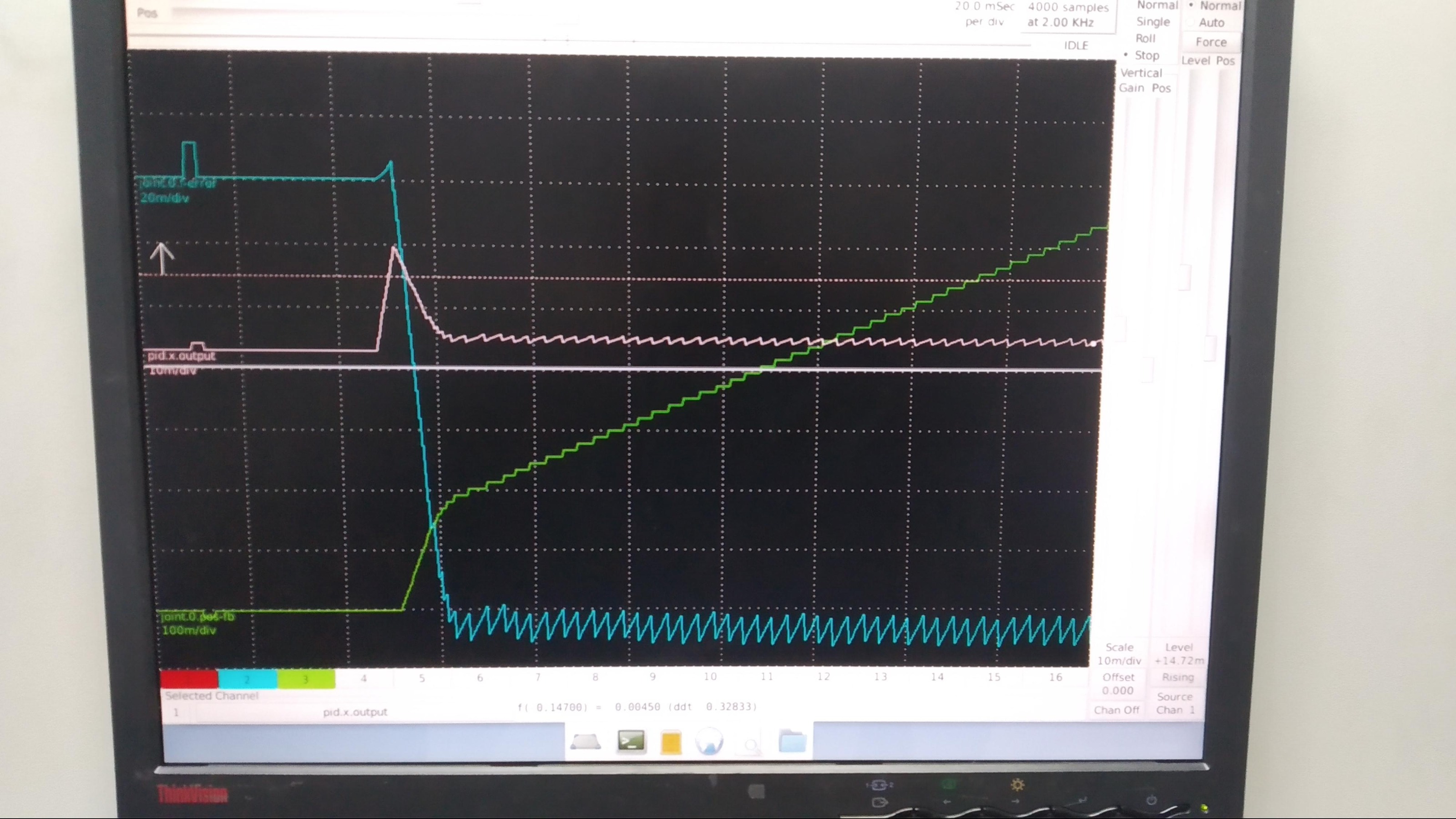
Today, when motor is cold I will check if everything is fine.
Then I reconfigured axe from start, I decreased BIAS to 0, I suspect that BIAS=0.02, as I had give big problem. I made configuration milder without integral and Derivative parameters and at the end received suvh transitional process in work.
Today, when motor is cold I will check if everything is fine.
Please Log in or Create an account to join the conversation.
- aleksamc
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 569
- Thank you received: 67
27 Oct 2020 07:26 - 27 Oct 2020 07:58 #187382
by aleksamc
Replied by aleksamc on topic Analog Servo runs at maximum speed at start
I tried today to run. But the same situation, it doesn't catch position and turns of from increasing f-error.
It seems that one chanel of 7i77 have BIAS that deppends on temperature.
BIAS between output (0.0V) and vitual output decreased to -0.43V
Suddenly BIAS change to 0.9V (to positive direction), it gives spike of f-error and turn off.
Machine stabilized but with big f-error. I see on the scope output sinal -0.9V but measurement by multimeter gives me 0.0V.After 20min of trying to move
It seems that one chanel of 7i77 have BIAS that deppends on temperature.
After 5 min when I write this topic
BIAS between output (0.0V) and vitual output decreased to -0.43V
Suddenly BIAS change to 0.9V (to positive direction), it gives spike of f-error and turn off.
Last edit: 27 Oct 2020 07:58 by aleksamc.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17986
- Thank you received: 5278
27 Oct 2020 14:38 - 27 Oct 2020 14:42 #187423
by PCW
Replied by PCW on topic Analog Servo runs at maximum speed at start
I looked at the pictures you sent, and if you have a drifting output, it really seems like
there is an ionic contaminant on the card, I first thought it was flux, but flux residue would
not cause this issue. Can you see if the residue washes off with water?
If its not flux, honestly it looks a bit like Coca-Cola...
there is an ionic contaminant on the card, I first thought it was flux, but flux residue would
not cause this issue. Can you see if the residue washes off with water?
If its not flux, honestly it looks a bit like Coca-Cola...
Last edit: 27 Oct 2020 14:42 by PCW.
Please Log in or Create an account to join the conversation.
Time to create page: 0.675 seconds