Jogging wobble/hunting
- sirbrialliance
- Offline
- New Member
-

Less
More
- Posts: 2
- Thank you received: 0
26 Apr 2024 00:08 #299088
by sirbrialliance
Jogging wobble/hunting was created by sirbrialliance
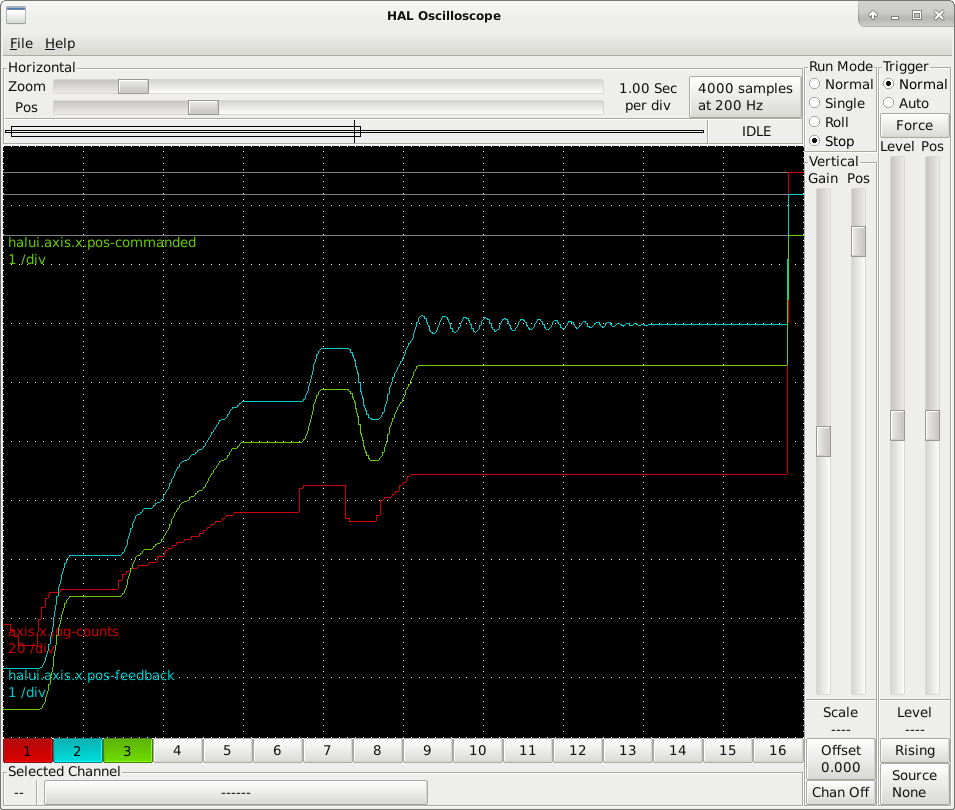
When I jog with my CNC setup (via a WHB04B-6), sometimes instead of going to the commanded position it sort of "wiggles" around the target position back and forth in a sort of sine wave until it eventually settles on the correct location. It's not a mechanics issues, LinuxCNC is commanding my (no feedback) steppers to move like this.
Additionally, if the sine wave tries to violate soft bounds everything faults and errors out.
What do I need to do to make it track my jogging exactly and not do weird things like this? I understand if it overshoots a bit if I suddenly switch directions, but it shouldn't have trouble tracking normal forward movement.
Additionally, if the sine wave tries to violate soft bounds everything faults and errors out.
What do I need to do to make it track my jogging exactly and not do weird things like this? I understand if it overshoots a bit if I suddenly switch directions, but it shouldn't have trouble tracking normal forward movement.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5282
26 Apr 2024 01:04 - 26 Apr 2024 04:03 #299089
by PCW
Replied by PCW on topic Jogging wobble/hunting
It looks to be an issue in the step generator.
I wonder if you have run into clipping of the feedback loop
because the step lengths and step space are so close
to bounding the maximum velocity.
I would first try setting the step lengths to say 30000,30000
so you have lots of margin.
Also there is no DPLL enabled, so you need a couple statements like:
setp hm2_7i96s.0.dpll.01.timer-us -100
setp hm2_7i96s.0.stepgen.timer-number 1
in the hal file
EDIT:
Actually, looking at the plot more carefully, it looks like
there is an acceleration constraint violation that starts
the oscillation. That seems more like a LinuxCNC bug.
I wonder if you have run into clipping of the feedback loop
because the step lengths and step space are so close
to bounding the maximum velocity.
I would first try setting the step lengths to say 30000,30000
so you have lots of margin.
Also there is no DPLL enabled, so you need a couple statements like:
setp hm2_7i96s.0.dpll.01.timer-us -100
setp hm2_7i96s.0.stepgen.timer-number 1
in the hal file
EDIT:
Actually, looking at the plot more carefully, it looks like
there is an acceleration constraint violation that starts
the oscillation. That seems more like a LinuxCNC bug.
Last edit: 26 Apr 2024 04:03 by PCW.
The following user(s) said Thank You: sirbrialliance
Please Log in or Create an account to join the conversation.
- sirbrialliance
- Offline
- New Member
-
Less
More
- Posts: 2
- Thank you received: 0
29 May 2024 01:01 #301714
by sirbrialliance
Replied by sirbrialliance on topic Jogging wobble/hunting
Thanks for taking a look and sharing your wisdom!
Adding the DPLL settings you suggested fixed it. Additionally, I'm not longer getting random "Joint x Following error" errors even while jogging completely within bounds.
Thanks a bunch!
Adding the DPLL settings you suggested fixed it. Additionally, I'm not longer getting random "Joint x Following error" errors even while jogging completely within bounds.
Thanks a bunch!
Please Log in or Create an account to join the conversation.
Time to create page: 0.102 seconds