Probe tripped during non-probe move deadlock
- djdelorie
- Away
- Senior Member
-

- Posts: 69
- Thank you received: 10
")
However, my comment here is... have you considered using a dummy probe move to retract the probe?
Please Log in or Create an account to join the conversation.
- DauntlessA
- Offline
- Junior Member
-

- Posts: 23
- Thank you received: 5
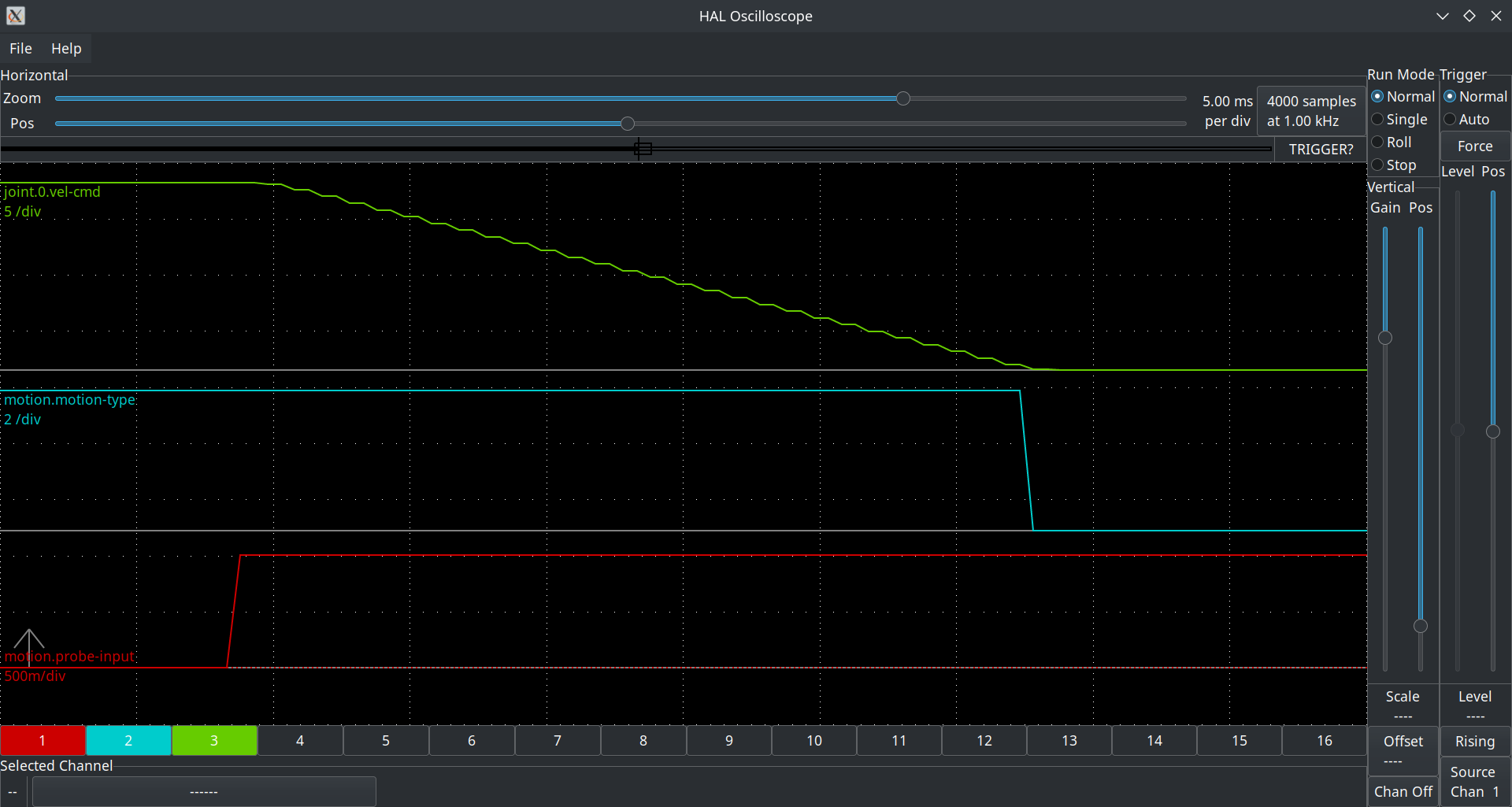
I believe that the issue I'm describing is exactly the one here:
github.com/LinuxCNC/linuxcnc/issues/2926
The last comment from that issue was you asking about the motion.motion-type following motion.probe-input going high.
I've looked in the halscope and it does seem that motion.motion-type remains at a value of 5 (Probing) until deceleration is completed, at which point the motion-type goes directly to 0 (Idle). So the issue isn't that the motion type resets immediately when the probe input triggers.
I was probing using just the X axis/joint 0 when I tested this.
I'll try and find out a bit more if I can.
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

- Posts: 19875
- Thank you received: 4642
github.com/LinuxCNC/linuxcnc/blob/2.9/sr...otion/control.c#L716
That only fails if "if (emcmotStatus->probing) {" (line 691) is false.
The confusion here is that I don't see any change in state in your motion.probe-in channel, it doesn't actually appear to be bouncing (or maybe only not in the plotted example?)
I don't know for sure that "SET_MOTION_ERROR_FLAG(1);" (line 726)drives motion.coord-error but it might be worth plotting that too.
Please Log in or Create an account to join the conversation.
- DauntlessA
- Offline
- Junior Member
-
- Posts: 23
- Thank you received: 5
But I see you've seen my pull request now, just linking it here for anyone else since I'll carry on discussion there.
github.com/LinuxCNC/linuxcnc/pull/3534
The test above doesn't show the probe bouncing, it just shows that motion.motion-type remains 5 (Probing), which is what I initially wanted to test.
In hindsight I should've just looked at control.c first, because the logic in there fully explains why the probe bouncing during probe move deceleration causes the issue.
Currently, after the probe is first triggered from a probe move, it doesn't matter what the motion type is, because it's either the first and only valid trigger during a probing move, or a trigger during a non-probe coordinated move.
So the simplest fix to just give an accurate error message which checks the motion type to determine the error message (which is where having confirmed that the motion.motion-type remains as probing for the entire probe move is ideal).
Please Log in or Create an account to join the conversation.
- abs32
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 2
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
- Posts: 19875
- Thank you received: 4642
Please Log in or Create an account to join the conversation.
- abs32
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 2
I created a program file and embedded debug messages into it. It was established that the error was triggered directly during execution of the g38.5 command
===========
(LOG,стр 65 )
#5070=1
(LOG,X#5061 Y#5062 Z#5063)
#5070=1
(LOG,стр 68)
#5070=1
G38.5 F[#<_скорость_отскока>] Z[#<_z> + #<_отскок>]
(LOG,стр 70)
===========
there is an entry in the log "стр 68", the machine was stopped by mistake and the state of the sensor - it drove away and in the "no contact" state #5070=0
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
- Posts: 19875
- Thank you received: 4642
Are you stuck on Buster (or even Stretch / Jessie?
You could, in principle, patch 2.8.4 with the updates made in 2.9 and recompile.
Please Log in or Create an account to join the conversation.
- abs32
- Offline
- Senior Member
-
- Posts: 77
- Thank you received: 2
If you teach how exactly, poke your nose into the "download, enter" type of instructions, then I can. Alas, in this area (patches, sources) I am weaker than in other areas.
While I’m trying to put v2.9.4 on the free partition and even with this there are problems - in the instructions
linuxcnc.org/docs/2.9/html/getting-start...#cha:Installing-RTAI
the required repository is specified with an error, the kernel itself is installed with errors, and For several years now they have forgotten to indicate in the instructions what to do first -
apt-get purge linuxcnc-uspace
apt-get purge linuxcnc-doc*
and then more
apt-get install linuxcnc
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
- Posts: 19875
- Thank you received: 4642
Buster.
Buster is a long way out of support now (end of life was June 2024).
It sounds like you are running with RTAI, which does work on Bookworm (I run it much of the time)
While I’m trying to put v2.9.4 on the free partition and even with this there are problems - in the instructions
linuxcnc.org/docs/2.9/html/getting-start...#cha:Installing-RTAI
the required repository is specified with an error, the kernel itself is installed with errors, and For several years now they have forgotten to indicate in the instructions what to do first -
apt-get purge linuxcnc-uspace
apt-get purge linuxcnc-doc*
and then more
apt-get install linuxcnc
Well the "they" above is to a large extent me.
You _probably_ don't need to purge the docs packages.
I have updated the instructions, but it will take a while for the updates to find their way to the web server.
Please Log in or Create an account to join the conversation.