X Achse spiegeln ohne den Gcode zu verändern
- mgm
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 210
- Thank you received: 13
12 Sep 2021 20:06 #220363
by mgm
Replied by mgm on topic X Achse spiegeln ohne den Gcode zu verändern
ja das Auswahlfenster öffbet sich, aber ich kann keinen Eintrag für axis/vismach finden!
Ich denke ich werde die Tage eine neue Instalation machen und mir das alles noch mal in Ruhe anschauen.
Ich Danke Dir für Deine Hilfe
Ich denke ich werde die Tage eine neue Instalation machen und mir das alles noch mal in Ruhe anschauen.
Ich Danke Dir für Deine Hilfe
Please Log in or Create an account to join the conversation.
- mgm
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 210
- Thank you received: 13
12 Sep 2021 22:28 #220377
by mgm
Replied by mgm on topic X Achse spiegeln ohne den Gcode zu verändern
Ich habe jetzt eine neue VM mit linuxcnc 2.8.2 erstellt.
Ich bekomme es jetzt urplötzlich nicht mehr hin Master 2.9 zu installieren.
Je mehr ich mich damit beschäftige desto weniger bekomme ich zum laufen.
Hat jemand eine Schnitt für Schritt Anleitung für die Installation für die Master 2.9 für mich?
Danke
Ich bekomme es jetzt urplötzlich nicht mehr hin Master 2.9 zu installieren.
Je mehr ich mich damit beschäftige desto weniger bekomme ich zum laufen.
Hat jemand eine Schnitt für Schritt Anleitung für die Installation für die Master 2.9 für mich?
Danke
Please Log in or Create an account to join the conversation.
- mgm
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 210
- Thank you received: 13
13 Sep 2021 15:29 #220449
by mgm
Replied by mgm on topic X Achse spiegeln ohne den Gcode zu verändern
Hallo zusammen,
ich bin am verzweifeln ..... ich habe jetzt eine neu VM gemacht und linux2.8.2 per iso instaliert.
danach habe ich in der Syneptic-Paketverwaltung unter Paketquellen zwei neue Einträge mit folgendem Inhalt gemacht:
Adresse --- buildbot.linuxcnc.org/
Ditribution --- buster
Bereich
master-rtpreempt
das einmal für deb und einmal für deb-scr
danach die Paketquellen neu eingelesen und nach etwas hinund her hat er dann etwas neu instaliert.
Das Ergebnis ist jetzt wenn ich linuxcnc im terminel aufrufe:
LINUXCNC - 2.9.0-pre0-4609-g382b2b7ea
Machine configuration directory is '/home/cnc/linuxcnc/configs/tandem'
Machine configuration file is 'tandem.ini'
check_config: Unchecked: [KINS]KINEMATICS=tandem
Starting LinuxCNC...
Found file(LIB): /usr/share/linuxcnc/hallib/basic_sim.tcl
setup_kins: cmd=loadrt tandem
Note: Using POSIX realtime
setup_kins: unknown [KINS]KINEMATICS=<tandem>
*** linuxcnc/configs/tandem/tandem.comp setup ok
Found file(REL): ./tandem.hal
Traceback (most recent call last):
File "./tandem-vismach", line 4, in <module>
from vismach import *
ImportError: No module named vismach
./tandem.hal:2: waitpid failed ./tandem-vismach tandem-vismach
./tandem.hal:2: ./tandem-vismach exited without becoming ready
Shutting down and cleaning up LinuxCNC...
tandemdata: not loaded
<commandline>:0: exit value: 255
<commandline>:0: rmmod failed, returned -1
<commandline>:0: unloadrt failed
Note: Using POSIX realtime
LinuxCNC terminated with an error. You can find more information in the log:
/home/cnc/linuxcnc_debug.txt and /home/cnc/linuxcnc_print.txt
as well as in the output of the shell command 'dmesg' and in the terminal
Irgend entwas habe ich doch falsch gemacht!
wie so ist kein vismach vorhanden?
anscheinend bin ich zu blöd die master version zu instalieren

Hat irgend einer eine Idee?
ich bin am verzweifeln ..... ich habe jetzt eine neu VM gemacht und linux2.8.2 per iso instaliert.
danach habe ich in der Syneptic-Paketverwaltung unter Paketquellen zwei neue Einträge mit folgendem Inhalt gemacht:
Adresse --- buildbot.linuxcnc.org/
Ditribution --- buster
Bereich
master-rtpreempt
das einmal für deb und einmal für deb-scr
danach die Paketquellen neu eingelesen und nach etwas hinund her hat er dann etwas neu instaliert.
Das Ergebnis ist jetzt wenn ich linuxcnc im terminel aufrufe:
LINUXCNC - 2.9.0-pre0-4609-g382b2b7ea
Machine configuration directory is '/home/cnc/linuxcnc/configs/tandem'
Machine configuration file is 'tandem.ini'
check_config: Unchecked: [KINS]KINEMATICS=tandem
Starting LinuxCNC...
Found file(LIB): /usr/share/linuxcnc/hallib/basic_sim.tcl
setup_kins: cmd=loadrt tandem
Note: Using POSIX realtime
setup_kins: unknown [KINS]KINEMATICS=<tandem>
*** linuxcnc/configs/tandem/tandem.comp setup ok
Found file(REL): ./tandem.hal
Traceback (most recent call last):
File "./tandem-vismach", line 4, in <module>
from vismach import *
ImportError: No module named vismach
./tandem.hal:2: waitpid failed ./tandem-vismach tandem-vismach
./tandem.hal:2: ./tandem-vismach exited without becoming ready
Shutting down and cleaning up LinuxCNC...
tandemdata: not loaded
<commandline>:0: exit value: 255
<commandline>:0: rmmod failed, returned -1
<commandline>:0: unloadrt failed
Note: Using POSIX realtime
LinuxCNC terminated with an error. You can find more information in the log:
/home/cnc/linuxcnc_debug.txt and /home/cnc/linuxcnc_print.txt
as well as in the output of the shell command 'dmesg' and in the terminal
Irgend entwas habe ich doch falsch gemacht!
wie so ist kein vismach vorhanden?
anscheinend bin ich zu blöd die master version zu instalieren
Hat irgend einer eine Idee?
Please Log in or Create an account to join the conversation.
- Aciera
-

- Online
- Administrator
-

Less
More
- Posts: 4740
- Thank you received: 2124
13 Sep 2021 15:52 #220452
by Aciera
Replied by Aciera on topic X Achse spiegeln ohne den Gcode zu verändern
Also machen wir doch nochmals einen Versuch eine Simulation mit Vismach Visualisierung zu laden.
Dazu im Terminal 'linuxcnc' eingeben und du solltest dieses Auswahlmenü angezeigt bekommen:
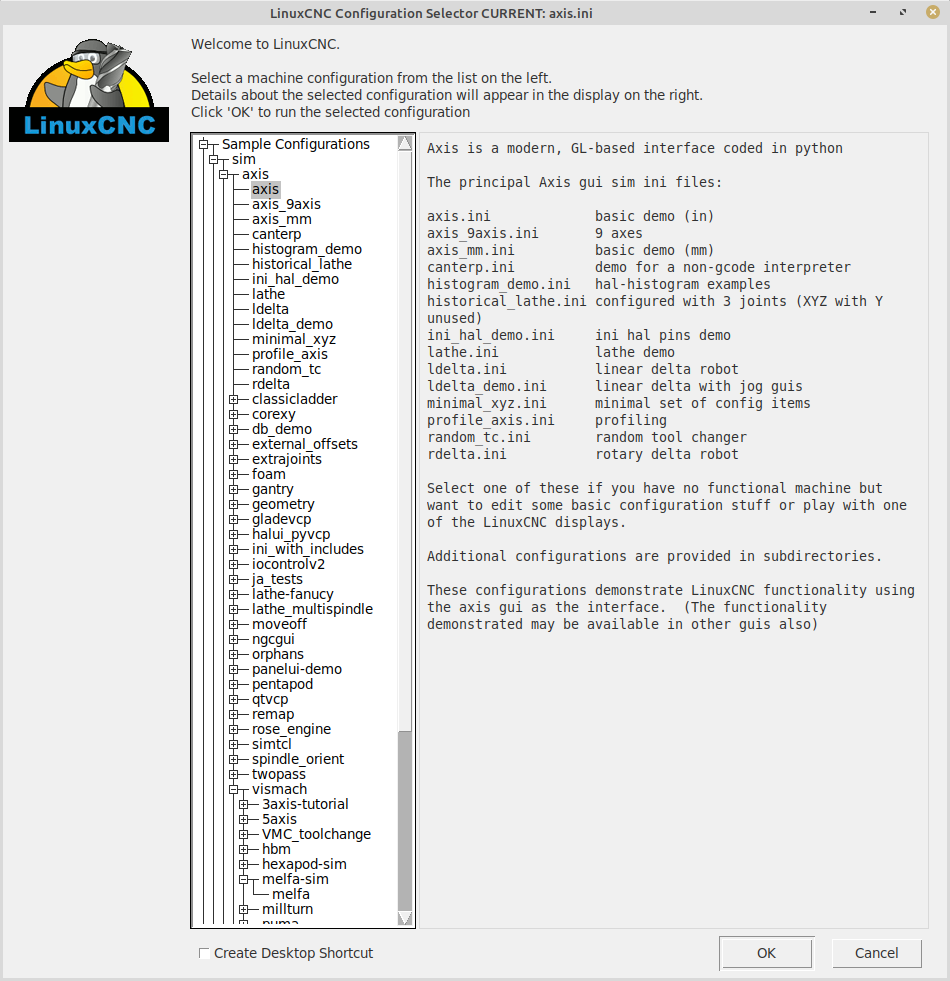
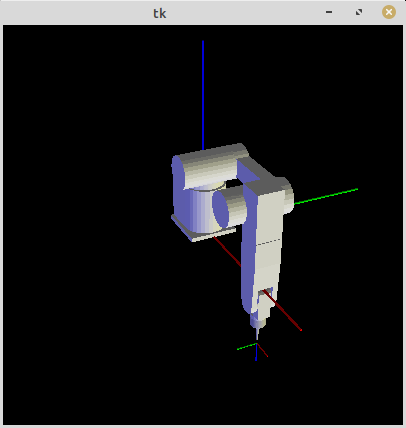
Hier solltest du nun unter 'Sample Configurations' / 'sim' / 'axis' / 'vismach' eine Simulation (zb / 'melfa-sim' / 'melfa') starten können und neben dem Linuxcnc 'axis' Fenster diese Vismach Grafik angezeigt erhalten:
Wenn das soweit funktioniert, dann muss ich nochmals über die Bücher. Ich habe momentan kein System mit der aktuellen master Version am laufen, kann's also nicht wirklich ausprobieren.
Dazu im Terminal 'linuxcnc' eingeben und du solltest dieses Auswahlmenü angezeigt bekommen:
Hier solltest du nun unter 'Sample Configurations' / 'sim' / 'axis' / 'vismach' eine Simulation (zb / 'melfa-sim' / 'melfa') starten können und neben dem Linuxcnc 'axis' Fenster diese Vismach Grafik angezeigt erhalten:
Wenn das soweit funktioniert, dann muss ich nochmals über die Bücher. Ich habe momentan kein System mit der aktuellen master Version am laufen, kann's also nicht wirklich ausprobieren.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Online
- Administrator
-
Less
More
- Posts: 4740
- Thank you received: 2124
13 Sep 2021 16:01 - 13 Sep 2021 16:05 #220453
by Aciera
Replied by Aciera on topic X Achse spiegeln ohne den Gcode zu verändern
Ich habe vielleicht den Fehler gefunden, du hast vermutlich doch recht gehabt mit der Pythonversion, denn deine aktuell master Installation unterstützt nur noch Python3. In der 'tandem-vismach' steht aber noch:
#!/usr/bin/python2
das müsste wohl geändert werden zu:
#!/usr/bin/python3
oder allenfalls:
#!/usr/bin/env python3

#!/usr/bin/python2
das müsste wohl geändert werden zu:
#!/usr/bin/python3
oder allenfalls:
#!/usr/bin/env python3
Last edit: 13 Sep 2021 16:05 by Aciera.
Please Log in or Create an account to join the conversation.
- mgm
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 210
- Thank you received: 13
13 Sep 2021 17:41 #220475
by mgm
Replied by mgm on topic X Achse spiegeln ohne den Gcode zu verändern
So jetzt kann ich die Simulation "tandem" von Dir öffnen. Es lag am python2.
Ich habe wie Du vorgeschlagen hast die Datei 'tandem-vismach' von python2 in python3 geändert und schon hat es funktioniert.
Super herzlichen Dank
Wie kann ich das jetzt in meine config übertragen?
Ich habe wie Du vorgeschlagen hast die Datei 'tandem-vismach' von python2 in python3 geändert und schon hat es funktioniert.
Super herzlichen Dank
Wie kann ich das jetzt in meine config übertragen?
Please Log in or Create an account to join the conversation.
- Aciera
-
- Online
- Administrator
-
Less
More
- Posts: 4740
- Thank you received: 2124
13 Sep 2021 18:33 #220482
by Aciera
Replied by Aciera on topic X Achse spiegeln ohne den Gcode zu verändern
Mal sehen ob ich das so aus dem Stehgreif hinkriege:
1. Kopiere die Ordner 'mcodes' und 'remap_subs' mitsammt Inhalt in deinen Konfigurationsordner.
2. In deiner ini brauchts:
[KINS]
KINEMATICS = tandem
JOINTS= 3
[HAL]
HALCMD = net :kinstype-select <= motion.analog-out-03 => motion.switchkins-type
[RS274NGC]
USER_M_PATH = ./mcodes
PARAMETER_FILE = tandem.var
SUBROUTINE_PATH = ./remap_subs
HAL_PIN_VARS = 1
INI_VARS = 1
REMAP = M428 modalgroup=10 ngc=428remap
REMAP = M429 modalgroup=10 ngc=429remap
# Set startup offets
RS274NGC_STARTUP_CODE = G10 L2 P7 X0 Y0 Z0 G59.1
[HALUI]
# MDI-COMMANDS 00, 01 (remapped) for switching kinematics and limits:
# M428: mill (kinstype==0 startupDEFAULT)
# M429: turn (kinstype==1)
MDI_COMMAND = M428
MDI_COMMAND = M429
# MDI-COMMANDS 02, 03 are for altering limits when switching
# Note that M129 and M129 are not meant to be called directly.
MDI_COMMAND = M128
MDI_COMMAND = M129
[AXIS_X]
# define softlimits for default kinematic
MIN_LIMIT = 0
MAX_LIMIT = 600
# define softlimits for alternate kinematic
MIN_LIMIT_RIGHT = -600
MAX_LIMIT_RIGHT = 0
Anmerkung
Meine Simulation geht davon aus, dass die Maschine mit der Spindel am linken Tischende die Home-position hat. Dann musst du in der [AXIS_X]-section den Verfahrweg ändern (also 600 mit deinem Verfahrweg ersetzen) Das ist auch deshalb wichtig weil die M428remap.ngc und M429remap.ngc mit diesen Werten den Werkstückoffset G54 an der Tischmitte spiegeln.
Wenn du die Schaltflächen auf der rechten Seite vom axis gui möchtest musst du die 'tandem-postgui.hal' und 'tandem.xml' ebenfalls in deinen Konfigurationsordner kopieren und die 'tandem-postgui.hal' über die ini laden.
In der ini [DISPLAY]-section:
PYVCP = tandem.xml
1. Kopiere die Ordner 'mcodes' und 'remap_subs' mitsammt Inhalt in deinen Konfigurationsordner.
2. In deiner ini brauchts:
[KINS]
KINEMATICS = tandem
JOINTS= 3
[HAL]
HALCMD = net :kinstype-select <= motion.analog-out-03 => motion.switchkins-type
[RS274NGC]
USER_M_PATH = ./mcodes
PARAMETER_FILE = tandem.var
SUBROUTINE_PATH = ./remap_subs
HAL_PIN_VARS = 1
INI_VARS = 1
REMAP = M428 modalgroup=10 ngc=428remap
REMAP = M429 modalgroup=10 ngc=429remap
# Set startup offets
RS274NGC_STARTUP_CODE = G10 L2 P7 X0 Y0 Z0 G59.1
[HALUI]
# MDI-COMMANDS 00, 01 (remapped) for switching kinematics and limits:
# M428: mill (kinstype==0 startupDEFAULT)
# M429: turn (kinstype==1)
MDI_COMMAND = M428
MDI_COMMAND = M429
# MDI-COMMANDS 02, 03 are for altering limits when switching
# Note that M129 and M129 are not meant to be called directly.
MDI_COMMAND = M128
MDI_COMMAND = M129
[AXIS_X]
# define softlimits for default kinematic
MIN_LIMIT = 0
MAX_LIMIT = 600
# define softlimits for alternate kinematic
MIN_LIMIT_RIGHT = -600
MAX_LIMIT_RIGHT = 0
Anmerkung
Meine Simulation geht davon aus, dass die Maschine mit der Spindel am linken Tischende die Home-position hat. Dann musst du in der [AXIS_X]-section den Verfahrweg ändern (also 600 mit deinem Verfahrweg ersetzen) Das ist auch deshalb wichtig weil die M428remap.ngc und M429remap.ngc mit diesen Werten den Werkstückoffset G54 an der Tischmitte spiegeln.
Wenn du die Schaltflächen auf der rechten Seite vom axis gui möchtest musst du die 'tandem-postgui.hal' und 'tandem.xml' ebenfalls in deinen Konfigurationsordner kopieren und die 'tandem-postgui.hal' über die ini laden.
In der ini [DISPLAY]-section:
PYVCP = tandem.xml
Please Log in or Create an account to join the conversation.
- mgm
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 210
- Thank you received: 13
13 Sep 2021 19:52 #220492
by mgm
Replied by mgm on topic X Achse spiegeln ohne den Gcode zu verändern
Ok werde ich testen ob ich das hinbekomme
Werde berichten
Werde berichten
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.175 seconds