Theoretische Maximale Schritte berechnen
- Muecke
-
 Topic Author
Topic Author
- Offline
- Moderator
-

Less
More
- Posts: 886
- Thank you received: 93
11 Apr 2022 12:48 #239917
by Muecke
Theoretische Maximale Schritte berechnen was created by Muecke
Hallo miteinander,
für einen Schrittmotor versuche ich gerade zu berechnen welche Schritte Theoretische machbar wären.
In der INI habe ich stehen:
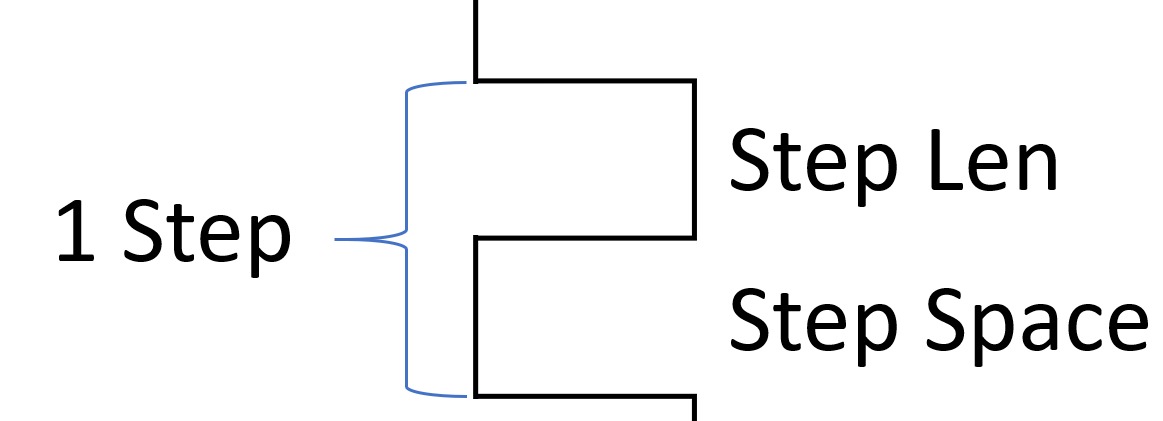
Schritt Dauer = Schritt Länge + Schritt Pause
1.000.000.000ns == 1 Sekunde
Maximale Anzahl an schritten wären also:
Max. = 1.000.000.000 / Schritt Dauer (10.000)
Max. = 100.000 Schritte pro Sekunde
Da meine Motoren und auch die Treiber das nie mit machen würde, kann ich die Wärter also noch etwas Großzügig nach oben ziehen.
Meine Frage an euch Profis habe ich das so richtig verstanden und berechnet, oder habe ich gerade einen Denkfehler in meinem System?
Gruß Mücke
für einen Schrittmotor versuche ich gerade zu berechnen welche Schritte Theoretische machbar wären.
In der INI habe ich stehen:
[JOINT_0]
...
# PUL Signal Länge
STEPLEN = 5000
# PUL Signal Pause
STEPSPACE = 5000
...Schritt Dauer = Schritt Länge + Schritt Pause
1.000.000.000ns == 1 Sekunde
Maximale Anzahl an schritten wären also:
Max. = 1.000.000.000 / Schritt Dauer (10.000)
Max. = 100.000 Schritte pro Sekunde
Da meine Motoren und auch die Treiber das nie mit machen würde, kann ich die Wärter also noch etwas Großzügig nach oben ziehen.
Meine Frage an euch Profis habe ich das so richtig verstanden und berechnet, oder habe ich gerade einen Denkfehler in meinem System?
Gruß Mücke
Attachments:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21694
- Thank you received: 7415
11 Apr 2022 17:24 #239940
by tommylight
Replied by tommylight on topic Theoretische Maximale Schritte berechnen
Servo period = 1000000ns = 1000us = 1ms
Base period = 100000ns = 100us = 0.1ms
step space + step time = 10000ns = 10us
Fuhr parallel port die base period ist benutzt, dan
1s/0.1ms = 10000 steps/s
Fur die servo period, die steps sind im Mesa carte generiert, die kan bis 10,000,000 (10 millionen) steps pro sekunde mahen.
Base period = 100000ns = 100us = 0.1ms
step space + step time = 10000ns = 10us
Fuhr parallel port die base period ist benutzt, dan
1s/0.1ms = 10000 steps/s
Fur die servo period, die steps sind im Mesa carte generiert, die kan bis 10,000,000 (10 millionen) steps pro sekunde mahen.
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 886
- Thank you received: 93
11 Apr 2022 17:51 #239945
by Muecke
Replied by Muecke on topic Theoretische Maximale Schritte berechnen
Ja genau, die Schritte werden in der Mesa 7i95 Generiert, daher unabhängig vom Parallelport.
Wenn ich deine Rechnung richtig verstanden habe habe ich richtig gerechnet.
Es ist unwahrscheinlich das meine 1.50EUR Treiber und Motoren so viel hin bekommen.
Mir ging es nur darum ob ich es verstanden habe wofür die Parameter da sind.
Danke, für dein Feedback. Mücke
Wenn ich deine Rechnung richtig verstanden habe habe ich richtig gerechnet.
Es ist unwahrscheinlich das meine 1.50EUR Treiber und Motoren so viel hin bekommen.
Mir ging es nur darum ob ich es verstanden habe wofür die Parameter da sind.
Danke, für dein Feedback. Mücke
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21694
- Thank you received: 7415
11 Apr 2022 17:59 #239947
by tommylight
Replied by tommylight on topic Theoretische Maximale Schritte berechnen
Ja, du has das richtig gerechnet.
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
Less
More
- Posts: 17957
- Thank you received: 5263
11 Apr 2022 18:10 #239949
by PCW
Replied by PCW on topic Theoretische Maximale Schritte berechnen
Ja, die maximale Schrittrate ist auf 1/(steplen+stepspace) begrenzt
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 886
- Thank you received: 93
11 Apr 2022 19:42 #239963
by Muecke
Replied by Muecke on topic Theoretische Maximale Schritte berechnen
Danke fürs Feedback, ich habe da immer wieder meine Probleme mit den Begrifflichkeiten und der Erklärung in der Dokumentation.
Endlich wieder ein Harken an etwas was ich verstanden habe.

Endlich wieder ein Harken an etwas was ich verstanden habe.
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 886
- Thank you received: 93
11 Apr 2022 20:08 #239969
by Muecke
Replied by Muecke on topic Theoretische Maximale Schritte berechnen
Was mir gerade durch den Kopf geht.
Wenn ich noch Luft habe für Schritte die generiert werden können, dann kann ich meine Treiber von 1/2 Schritte auf 1/4 oder 1/8 oder 1/16 Schritte stellen.
Dann könnte LinuxCNC schon deutlich genauer Fahren und Positionieren?
Gedankenspiel:
1/2 Schritte
* 400 Schritte pro Umdrehung
* 1 Schritt = 360°/400 = 0,9°
1/4 Schritte
* 800 Schritte pro Umdrehung
* 1 Schritt = 360°/800 = 0,45°
1/8 Schritte
* 1.600 Schritte pro Umdrehung
* 1 Schritt = 360°/1.600 = 0,225°
Hmm, mit was habt Ihr eure Treiber bei Schrittmotoren denn laufen?
Ein Schrittmotor hat bis ca. 100rpm ein gutes Drehmoment, jetzt muss ich schauen das ich die Schritt Frequenz nicht zu hoch setze das der Treiber das nicht mehr mit macht, ich jedoch immer noch auf auf Ordentliche Geschwindigkeit komme.
Dann könnte man da noch etwas feiner werden, dann ist eventuell auch die Rampe (Anfahren und Bremsen) nicht mehr so hart. Das ist immer sehr laut finde ich.
Eventuell läuft der Motor dann auch reuiger wenn mehr schritte gemacht werden, da die Pausen zwischen den Schritten nicht so lange sind.
Das sind gerade nur so Überlegungen die ich habe.
gruß Mücke
Wenn ich noch Luft habe für Schritte die generiert werden können, dann kann ich meine Treiber von 1/2 Schritte auf 1/4 oder 1/8 oder 1/16 Schritte stellen.
Dann könnte LinuxCNC schon deutlich genauer Fahren und Positionieren?
Gedankenspiel:
1/2 Schritte
* 400 Schritte pro Umdrehung
* 1 Schritt = 360°/400 = 0,9°
1/4 Schritte
* 800 Schritte pro Umdrehung
* 1 Schritt = 360°/800 = 0,45°
1/8 Schritte
* 1.600 Schritte pro Umdrehung
* 1 Schritt = 360°/1.600 = 0,225°
Hmm, mit was habt Ihr eure Treiber bei Schrittmotoren denn laufen?
Ein Schrittmotor hat bis ca. 100rpm ein gutes Drehmoment, jetzt muss ich schauen das ich die Schritt Frequenz nicht zu hoch setze das der Treiber das nicht mehr mit macht, ich jedoch immer noch auf auf Ordentliche Geschwindigkeit komme.
Dann könnte man da noch etwas feiner werden, dann ist eventuell auch die Rampe (Anfahren und Bremsen) nicht mehr so hart. Das ist immer sehr laut finde ich.
Eventuell läuft der Motor dann auch reuiger wenn mehr schritte gemacht werden, da die Pausen zwischen den Schritten nicht so lange sind.
Das sind gerade nur so Überlegungen die ich habe.
gruß Mücke
Please Log in or Create an account to join the conversation.
- strahlensauger
-

- Offline
- Elite Member
-

Less
More
- Posts: 195
- Thank you received: 66
11 Apr 2022 21:53 #239981
by strahlensauger
Replied by strahlensauger on topic Theoretische Maximale Schritte berechnen
In der Doku findest du einiges dazu.
linuxcnc.org/docs/stable/html/integrator/steppers.html
Bei 1/4 Schritten bist du schon 0,006 mm
bei einer 5mm KUS, es stellt sich die Frage
ob diese Auflösung auf einer Hobbyfräse überhaupt sinnvoll genutzt werden kann.
linuxcnc.org/docs/stable/html/integrator/steppers.html
Bei 1/4 Schritten bist du schon 0,006 mm
bei einer 5mm KUS, es stellt sich die Frage
ob diese Auflösung auf einer Hobbyfräse überhaupt sinnvoll genutzt werden kann.
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17957
- Thank you received: 5263
11 Apr 2022 22:22 #239983
by PCW
Replied by PCW on topic Theoretische Maximale Schritte berechnen
Der Hauptvorteil höherer ustep-Verhältnisse ist die Glätte. Ich würde immer mindestens 1/32 verwenden, wenn Ihre Treiber dies unterstützen. Die Genauigkeit des Schrittmotors beträgt typischerweise etwa 1/4 bis 1/2 eines Vollschritts, unabhängig vom ustep-Verhältnis.
The following user(s) said Thank You: Muecke
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
Less
More
- Posts: 886
- Thank you received: 93
12 Apr 2022 04:37 #240011
by Muecke
Replied by Muecke on topic Theoretische Maximale Schritte berechnen
Das ist sehr interessant, denn ich min mir auch sehr sicher gewesen, das Schrittmotoren nicht im Vollschritt Modus betrieben werden sollen.
Hier im Forum habe ich dann jedoch schon gelesen das Vollschritte besser wären.
Beim Einstellen der Motoren (bzw. bisher nur einer) hatte ich wieder den Gedanken an Voll Halb etc. schritte.
Jetzt Lese ich das 1/32 gut wären, würde für mich Logisch klingen, da der Motor Sauberer laufen kann und nicht so lange Pausen zwischen den einzelnen schritten hat.
Gestern Abend als Nachtlecktüre hatte ich dann diesen hier gelesen.
www.faulhaber.com/de/support/technischer...mikroschrittbetrieb/
Es war schon spät und ich sehr Müde, doch wenn ich es richtig verstanden habe verliere ich im Mikroschrittbetrieb deutlich an Kraft.
[/Quote]
Quelle: Faulhaber
Mikroschrittbetrieb = Drehmoment
1/1 = 100%
1/2 = 70,71%
1/4 = 38,27%
1/8 = 19,51%
1/16 = 9,80%
1/32 = 4,91%
1/64 = 2,45%
1/128 = 1,23%
1/256 = 0,61%[/Quote]
Jetzt bin ich sehr, hin und her gerissen.
Im Vollschritt kann ich die nicht laufen lassen da meine Treiber das nicht machen
Ich glaube das ich mir eine Einstellung für die 1/2 Schritte mache (Jetzt gerade eingestellt)
und eine für 1/32 Schritte.
So kann ich dann zwischen den einzelnen Einstellungen hin und her springen und schauen was für Auswirkungen es hat. Ich glaube ich werde auch eine Zug wage anbringen und schauen was meine Achse so gezogen bekommt. (ich hoffe ich mache die nicht Kaputt")
Gestern habe ich das erste mal eine Digitale Schieblehre verschrottet, komplett verbogen. ;-(, ist doof wenn man plus und minus verwechselt. *LOL* naja kommt vor.
Ich wünsche einen Guten Start in den Tag.
Gruß Mücke
Hier im Forum habe ich dann jedoch schon gelesen das Vollschritte besser wären.
Beim Einstellen der Motoren (bzw. bisher nur einer) hatte ich wieder den Gedanken an Voll Halb etc. schritte.
Jetzt Lese ich das 1/32 gut wären, würde für mich Logisch klingen, da der Motor Sauberer laufen kann und nicht so lange Pausen zwischen den einzelnen schritten hat.
Gestern Abend als Nachtlecktüre hatte ich dann diesen hier gelesen.
www.faulhaber.com/de/support/technischer...mikroschrittbetrieb/
Es war schon spät und ich sehr Müde, doch wenn ich es richtig verstanden habe verliere ich im Mikroschrittbetrieb deutlich an Kraft.
[/Quote]
Quelle: Faulhaber
Mikroschrittbetrieb = Drehmoment
1/1 = 100%
1/2 = 70,71%
1/4 = 38,27%
1/8 = 19,51%
1/16 = 9,80%
1/32 = 4,91%
1/64 = 2,45%
1/128 = 1,23%
1/256 = 0,61%[/Quote]
Jetzt bin ich sehr, hin und her gerissen.
Im Vollschritt kann ich die nicht laufen lassen da meine Treiber das nicht machen
Ich glaube das ich mir eine Einstellung für die 1/2 Schritte mache (Jetzt gerade eingestellt)
und eine für 1/32 Schritte.
So kann ich dann zwischen den einzelnen Einstellungen hin und her springen und schauen was für Auswirkungen es hat. Ich glaube ich werde auch eine Zug wage anbringen und schauen was meine Achse so gezogen bekommt. (ich hoffe ich mache die nicht Kaputt
Gestern habe ich das erste mal eine Digitale Schieblehre verschrottet, komplett verbogen. ;-(, ist doof wenn man plus und minus verwechselt. *LOL* naja kommt vor.
Ich wünsche einen Guten Start in den Tag.
Gruß Mücke
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.199 seconds