Config-Problem Ethercat
- Red_D85
- Offline
- Junior Member
-

Less
More
- Posts: 36
- Thank you received: 1
03 Oct 2025 08:27 #335762
by Red_D85
Config-Problem Ethercat was created by Red_D85
Hallo
ich habe ein oder besser mehrer Probleme mit meiner Config. Vielleicht kann mir ja helfen das ein oder andere Problem zu beseitigen.
meine Config :
EK1100
Lichuan TLC36V-E (Y)
Rtelligent ECR60 (Z)
LinuxCNC startet fehlerfrei auf aber:
Freundliche Grüsse
ich habe ein oder besser mehrer Probleme mit meiner Config. Vielleicht kann mir ja helfen das ein oder andere Problem zu beseitigen.
meine Config :
EK1100
- EL1008
- EL4001
- EL9010
Lichuan TLC36V-E (Y)
Rtelligent ECR60 (Z)
LinuxCNC startet fehlerfrei auf aber:
- Problem 1 Z-Achse wird zwar Aktiv aber bewegt sich nicht. Man muss dazu sagen ECR60 hat leider kein Encoder-Feedback
- Problem 2 Kein DC / Watchdog, wenn dieses Aktiv geschaltet wird fallen die Lichuan in SafOP+ERR
Freundliche Grüsse
Attachments:
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
04 Oct 2025 07:50 - 04 Oct 2025 16:51 #335809
by Hakan
Replied by Hakan on topic Config-Problem Ethercat
1. Z is not connected to the joint. Check the hal file how it is done for X and Y and do the same way for Z.
2. To enable DC
refClockSyncCycles= -1000 (or any other negative or positive number you like to use, not 0)
Use the line <dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
and remove the watchog line. Normally don't need to specify that, there is a default watchdog of 100 ms
If the drive absolutely wants a watchdog statement, use the line <watchdog divider="2498" intervals="1000"/>
2. To enable DC
refClockSyncCycles= -1000 (or any other negative or positive number you like to use, not 0)
Use the line <dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
and remove the watchog line. Normally don't need to specify that, there is a default watchdog of 100 ms
If the drive absolutely wants a watchdog statement, use the line <watchdog divider="2498" intervals="1000"/>
Last edit: 04 Oct 2025 16:51 by Hakan. Reason: Removed comment
Please Log in or Create an account to join the conversation.
- Red_D85
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 1
06 Oct 2025 05:42 #335896
by Red_D85
Replied by Red_D85 on topic Config-Problem Ethercat
sorry im a idiot. this was the wrong file.
Attachments:
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
06 Oct 2025 07:47 #335902
by Hakan
Replied by Hakan on topic Config-Problem Ethercat
Haha, ok..
Taking this as the cia402 reference example github.com/dbraun1981/hal-cia402/blob/main/example/cia402.hal
you normally connect opmode to the cia402 module. I would say connect lcec.0.5 to cia402.2 in the same way as in the example.
Taking this as the cia402 reference example github.com/dbraun1981/hal-cia402/blob/main/example/cia402.hal
you normally connect opmode to the cia402 module. I would say connect lcec.0.5 to cia402.2 in the same way as in the example.
Please Log in or Create an account to join the conversation.
- Red_D85
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 1
07 Oct 2025 05:04 #335975
by Red_D85
Replied by Red_D85 on topic Config-Problem Ethercat
Das Problem hab ich gefunden nur keine idee wie ich es umgehen kann. Es wird ein Feedback vom Motor/Encoder erwartet aber der ECR60 hat keinen. Hat jemand einen Lösungsvorschlag um das zu umgehen?
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
07 Oct 2025 09:05 #335984
by Hakan
Replied by Hakan on topic Config-Problem Ethercat
I assume the ERC60 just reports back the commanded position as actual position, without knowing if it lost steps.
Have you verified with halshow that joint.2.motor-pos-fb =cia402.2.pos-cmd and cia402.2.drv-actual-position = lcec.0.5.actual-position?
Have you verified with halshow that joint.2.motor-pos-fb =cia402.2.pos-cmd and cia402.2.drv-actual-position = lcec.0.5.actual-position?
Please Log in or Create an account to join the conversation.
- Red_D85
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 1
07 Oct 2025 12:15 #335995
by Red_D85
Replied by Red_D85 on topic Config-Problem Ethercat
Yes thats ok
But i can not link joint.2.motor-pos-fb to cia402.2.pos-fb
Because it is already linked :net z-pos-cmd joint.2.motor-pos-cmd cia402.pos-cmd joint.2.motor-pos-fb
Axis and halshow means that move the axis but it dosnt move.
But i can not link joint.2.motor-pos-fb to cia402.2.pos-fb
Because it is already linked :net z-pos-cmd joint.2.motor-pos-cmd cia402.pos-cmd joint.2.motor-pos-fb
Axis and halshow means that move the axis but it dosnt move.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
07 Oct 2025 13:43 - 07 Oct 2025 13:45 #336007
by Hakan
Replied by Hakan on topic Config-Problem Ethercat
Can you check that the drive is in OP like below
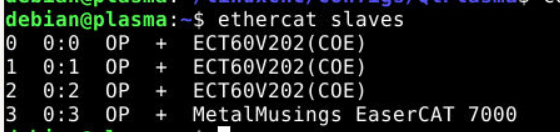
And with halshow that you have the same values in the following parameters,
not the commanded and actual positions of course, but they should follow the same pattern.
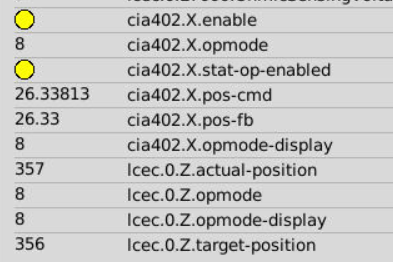
For your Z drive.
And with halshow that you have the same values in the following parameters,
not the commanded and actual positions of course, but they should follow the same pattern.
For your Z drive.
Attachments:
Last edit: 07 Oct 2025 13:45 by Hakan.
Please Log in or Create an account to join the conversation.
- Red_D85
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 1
08 Oct 2025 04:33 #336076
by Red_D85
Replied by Red_D85 on topic Config-Problem Ethercat
here my screenshoots:
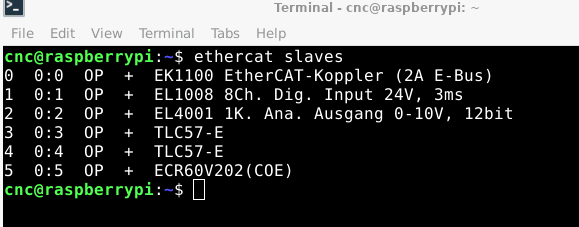
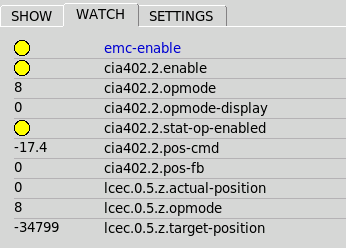
Thanks for your help
Thanks for your help
Attachments:
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
08 Oct 2025 08:32 #336077
by Hakan
Replied by Hakan on topic Config-Problem Ethercat
Also check opmode-display and connect it to cia402
like here github.com/dbraun1981/hal-cia402/blob/ma...le/ethercat-conf.xml and here github.com/dbraun1981/hal-cia402/blob/main/example/cia402.hal
If it still doesn't work after that, you should do a factory reset of the erc60.
It means writing to a SDO with "ethercat download -p 5 0x2nnn m 1"
where you need to find the right index n and subindex m from the erc60 manual.
like here github.com/dbraun1981/hal-cia402/blob/ma...le/ethercat-conf.xml and here github.com/dbraun1981/hal-cia402/blob/main/example/cia402.hal
If it still doesn't work after that, you should do a factory reset of the erc60.
It means writing to a SDO with "ethercat download -p 5 0x2nnn m 1"
where you need to find the right index n and subindex m from the erc60 manual.
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.230 seconds