- International LinuxCNC Users
- Deutsch
- Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21702
- Thank you received: 7417
19 Nov 2025 22:06 #338761
by tommylight
Replied by tommylight on topic Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Added this to the link i posted here to better explain what can be used :Thank you for reminding me.
Danke schon.
-This CAN be used for closed loop steppers with encoders wired to their drives and ADDED encoders or glass scalesDanke schon.
Please Log in or Create an account to join the conversation.
- Jensner
- Offline
- Premium Member
-

Less
More
- Posts: 151
- Thank you received: 28
20 Nov 2025 05:48 - 20 Nov 2025 05:48 #338769
by Jensner
so i will test it today.
hopefully this will work.
This was a lot of work adapting these linear-encoders and make all work, but it would be an extreme optimization of my machine to get it to the level of accuracy I always wanted. Not least to finally get a handle on the occasional step losses on the X-axis.
But with you all, i am sure. At the end this will work! ;o)
Replied by Jensner on topic Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Thanks tommy,The link i posted, explicitly mentions making the machine work without encoder feedback to LinuxCNC first, so enable the stepgen feedback in the hal file and omit the encoder feedback, test the machine, set the scaling correctly, and only after getting this done activate the encoder feedback and omit the stepgen feedback.
Closed loop stepers when loop is closed on the drives are viewed as normal open loop steppers from LinuxCNC.
So yes, it should work with your drives, just make sure they work properly in open loop mode to LinuxCNC.
so i will test it today.
hopefully this will work.
This was a lot of work adapting these linear-encoders and make all work, but it would be an extreme optimization of my machine to get it to the level of accuracy I always wanted. Not least to finally get a handle on the occasional step losses on the X-axis.
But with you all, i am sure. At the end this will work! ;o)
Last edit: 20 Nov 2025 05:48 by Jensner.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Jensner
- Offline
- Premium Member
-
Less
More
- Posts: 151
- Thank you received: 28
20 Nov 2025 20:54 - 21 Nov 2025 06:24 #338831
by Jensner
Replied by Jensner on topic Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Hello,
today I did the steps from tommy`s link.
At the end i played around with the P and FF1.
After arount 50 different tests, slowly the hard errors dissapeared and at the end i found the best working configuration with P=15 and FF1 =1
So I configured this parameter on all 3 Axes and it works.
Only one last problem is the speed for "Go To Home"
Is ther a info where i can find the different settings for all moves?
Jogging Speed is OK and i can change ist via the GUI.
Homing Speed is also OK, but "Go Home" is far to fast.
Best regards
Jens
Here is my config (with working Linear-Encoders & Closed Loop Stepper)
today I did the steps from tommy`s link.
At the end i played around with the P and FF1.
After arount 50 different tests, slowly the hard errors dissapeared and at the end i found the best working configuration with P=15 and FF1 =1
So I configured this parameter on all 3 Axes and it works.
Only one last problem is the speed for "Go To Home"
Is ther a info where i can find the different settings for all moves?
Jogging Speed is OK and i can change ist via the GUI.
Homing Speed is also OK, but "Go Home" is far to fast.
Best regards
Jens
Here is my config (with working Linear-Encoders & Closed Loop Stepper)
Attachments:
Last edit: 21 Nov 2025 06:24 by Jensner.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21702
- Thank you received: 7417
20 Nov 2025 21:03 #338832
by tommylight
Replied by tommylight on topic Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Was ist "go home" ?
A button on the GUI?
Probably by editing that button from G53 to G54 Fxxxx ...
A button on the GUI?
Probably by editing that button from G53 to G54 Fxxxx ...
Please Log in or Create an account to join the conversation.
- Jensner
- Offline
- Premium Member
-
Less
More
- Posts: 151
- Thank you received: 28
20 Nov 2025 21:09 - 20 Nov 2025 21:10 #338833
by Jensner
Replied by Jensner on topic Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Sorry, this is a Button at the Probe Basic GUI
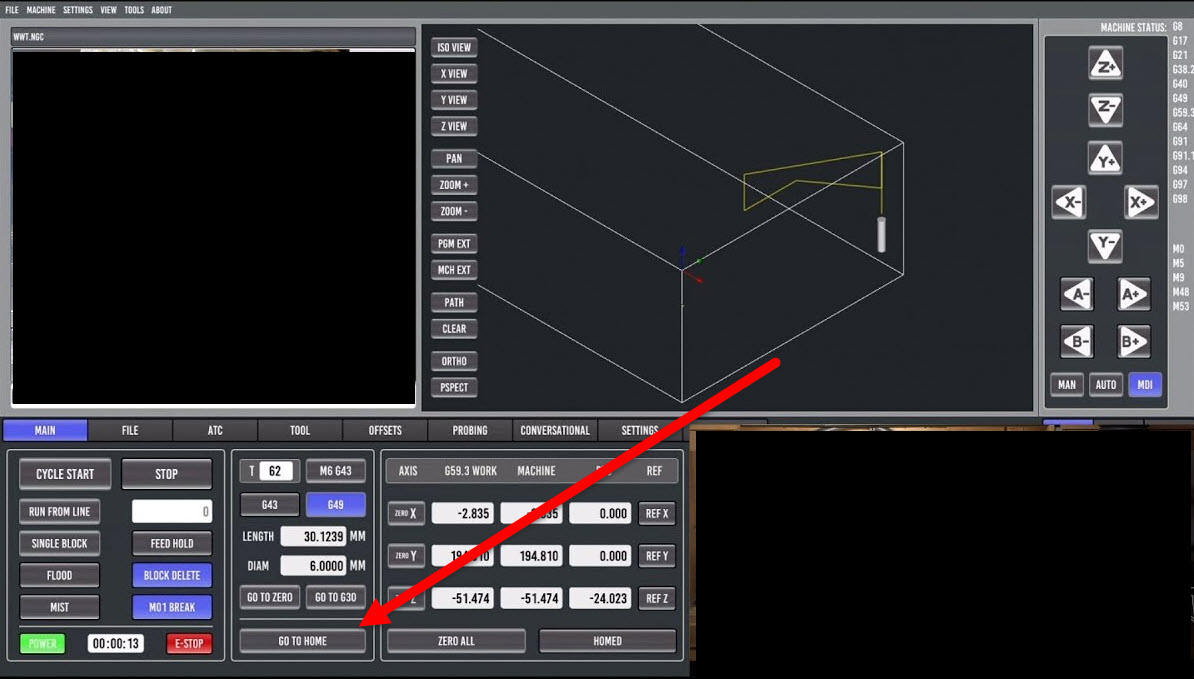
Furthere more where can i decrease the "G0" speed?
Furthere more where can i decrease the "G0" speed?
Attachments:
Last edit: 20 Nov 2025 21:10 by Jensner.
Please Log in or Create an account to join the conversation.
- Jensner
- Offline
- Premium Member
-
Less
More
- Posts: 151
- Thank you received: 28
21 Nov 2025 06:00 #338858
by Jensner
Replied by Jensner on topic Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Becouse of this speed-problem i had a look at the documantation for the INI.
There are many more questions, but maybe I found some answers.
There are many more questions, but maybe I found some answers.
- In [TRAJ] i lowered the DEFAULT_LINEAR_VELOCITY and MAX_LINEAR_VELOCITY
By the way, at the moment I do not check exactly how there where Velocity and acceleration-variables in TRAJ, AXIS_ and JOINT_
- One more thing i found, was the DEADBAND = 0.0
In the documentation it means that this is the tolerance-variable for the PID if the position is between the tolerance.
So in my config this is 0.0 this should be to less an leads to "Servo Hunting"
Please Log in or Create an account to join the conversation.
- Jensner
- Offline
- Premium Member
-
Less
More
- Posts: 151
- Thank you received: 28
24 Feb 2026 14:21 #343399
by Jensner
Replied by Jensner on topic Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
After nearly 3 Month i have to thank all of you.
Last November I startet these upgrade with linear encoders on all axis and after view days with try and error i just solved the problems and i can`t tell what a gamechanger this upgrade was to my mill.
Before this upgrade I allways had the problem, that on long programs with many moves i often had some losses of steps and the result never was perfect. (mostly on my 2m long X-axle) After the upgrade to the encoder its a dream to work. No more losses of steps and i can work on a level i never dreamd of.
Next project will be an upgrade to an ATC Spindle with a cabinet.
So i think th next thead is coming soon ...
Thanks a lot at all
Jens
Last November I startet these upgrade with linear encoders on all axis and after view days with try and error i just solved the problems and i can`t tell what a gamechanger this upgrade was to my mill.
Before this upgrade I allways had the problem, that on long programs with many moves i often had some losses of steps and the result never was perfect. (mostly on my 2m long X-axle) After the upgrade to the encoder its a dream to work. No more losses of steps and i can work on a level i never dreamd of.
Next project will be an upgrade to an ATC Spindle with a cabinet.
So i think th next thead is coming soon ...
Thanks a lot at all
Jens
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Moderators: Muecke
- International LinuxCNC Users
- Deutsch
- Aufschaukeln mit JMC iHSS60-36-30-21-38 in Verbindung mit Linear Encodern
Time to create page: 0.305 seconds