- International LinuxCNC Users
- Français
- StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
- 3Draf
- Offline
- New Member
-

Less
More
- Posts: 3
- Thank you received: 0
05 Sep 2025 07:24 #334475
by 3Draf
StepConf - tandem axe Y - comment configurer 2 moteurs synchrones was created by 3Draf
Bonjour à tous,
J'ai une découpeuse plasma sous Mach3 et je souhaite l'utiliser avec LinuxCNC.
L'univers de LinuxCNC est nouveau pour moi donc j'avance à petit pas.
Après mes déboires avec l'axe X qui saccadait que j'ai pu régler en augmentant le "Base Period Maximum Jitter".
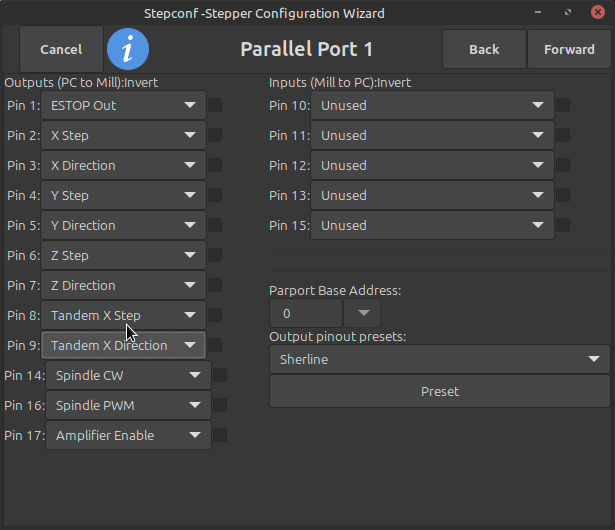
Je me retrouve dans l'impasse pour l'axe Y, j'ai 2 moteurs en symétrie (donc l'un des deux doit être inversé) mais quelle que soit la configuration des pins (ex: pin4= step Y/ pin 5= dir Y / pin 8 = tandem step Y / pin 9 = tandem dir Y inv), je n'arrive pas à faire bouger les 2 moteurs en même temps.
J'arrive à faire déplacer un moteur soit Y1, soit Y2 et seul celui config en step Y et dir Y fonctionne (juste Y1 s'ils sont configurés pareil).
Est-ce une mauvaise compréhension de ces paramètres ?
Dois-je éditer manuellement les fichiers .hal et .ini ?
Quel est la bonne méthode dans StepConf pour synchroniser 2 moteurs ?
Merci de m'avoir lu,
Raph
J'ai une découpeuse plasma sous Mach3 et je souhaite l'utiliser avec LinuxCNC.
L'univers de LinuxCNC est nouveau pour moi donc j'avance à petit pas.
Après mes déboires avec l'axe X qui saccadait que j'ai pu régler en augmentant le "Base Period Maximum Jitter".
Je me retrouve dans l'impasse pour l'axe Y, j'ai 2 moteurs en symétrie (donc l'un des deux doit être inversé) mais quelle que soit la configuration des pins (ex: pin4= step Y/ pin 5= dir Y / pin 8 = tandem step Y / pin 9 = tandem dir Y inv), je n'arrive pas à faire bouger les 2 moteurs en même temps.
J'arrive à faire déplacer un moteur soit Y1, soit Y2 et seul celui config en step Y et dir Y fonctionne (juste Y1 s'ils sont configurés pareil).
Est-ce une mauvaise compréhension de ces paramètres ?
Dois-je éditer manuellement les fichiers .hal et .ini ?
Quel est la bonne méthode dans StepConf pour synchroniser 2 moteurs ?
Merci de m'avoir lu,
Raph
Please Log in or Create an account to join the conversation.
- 3Draf
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 0
08 Sep 2025 14:02 #334625
by 3Draf
Replied by 3Draf on topic StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
Hello, thank you for your reply.
I can't connect them to the same driver because the motors are symmetrically positioned, meaning the direction of motor Y2 must be reversed.
In addition, I plan to install two limit switches later to correct for positioning mismatches between the two motors, which requires two independent outputs (and inputs).
P.S.: I'm using LinuxCNC 2.9.4 on an old PC with a parallel port.
Bonjour, merci pour votre réponse.
Je ne peux pas les connecter sur le même driver, car les moteurs sont placés de manière symétrique, ce qui fait que la direction du moteur Y2 dois être inversée.
De plus, je compte par la suite installer deux capteurs de fin de course pour corriger les décalages de positionnement entre les deux moteurs, si qui nécessite d'avoir deux sorties (et entrer) indépendantes.
Ps : j'utilise linuxCNC 2.9.4 sur un vieux PC avec port parallèle.
I can't connect them to the same driver because the motors are symmetrically positioned, meaning the direction of motor Y2 must be reversed.
In addition, I plan to install two limit switches later to correct for positioning mismatches between the two motors, which requires two independent outputs (and inputs).
P.S.: I'm using LinuxCNC 2.9.4 on an old PC with a parallel port.
Bonjour, merci pour votre réponse.
Je ne peux pas les connecter sur le même driver, car les moteurs sont placés de manière symétrique, ce qui fait que la direction du moteur Y2 dois être inversée.
De plus, je compte par la suite installer deux capteurs de fin de course pour corriger les décalages de positionnement entre les deux moteurs, si qui nécessite d'avoir deux sorties (et entrer) indépendantes.
Ps : j'utilise linuxCNC 2.9.4 sur un vieux PC avec port parallèle.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21694
- Thank you received: 7415
08 Sep 2025 14:39 #334626
by tommylight
Replied by tommylight on topic StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
You can, just switch places of ONE winding on the motor.I can't connect them to the same driver because the motors are symmetrically positioned, meaning the direction of motor Y2 must be reversed.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21694
- Thank you received: 7415
08 Sep 2025 17:33 #334642
by tommylight
Sorry for my lackluster explanation, i had a friend waiting for me back then.
Replied by tommylight on topic StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
Yes, exactly.What does switch places mean?
Swap the wires of one winding?
Sorry for my lackluster explanation, i had a friend waiting for me back then.
Please Log in or Create an account to join the conversation.
- 3Draf
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 0
09 Sep 2025 07:04 #334674
by 3Draf
Replied by 3Draf on topic StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
J'ai installé les interrupteurs de fin de course, un pour chaque moteur.
Je veux synchroniser les moteurs de manière logicielle pour qu'ils puissent se calibrer séparément et se déplacer de manière synchrone.
L'inversion des câbles est une bonne solution, mais cette machine appartient à mon employeur qui préfère ne pas toucher au matériel (et garder la compatibilité avec l'autre pc avec Mach3)
Dois-je modifier les fichiers .hal et .ini ou est-ce possible avec StepConf ?
I've installed limit switches, one for each motor.
I want to synchronize the motors in software so they can calibrate separately and move synchronously.
Reversing the cables is a good solution, but this machine belongs to my employer, who prefers not to touch the hardware (and maintain compatibility with the other PC with Mach3).
Do I need to modify the .hal and .ini files, or is this possible with StepConf?
Je veux synchroniser les moteurs de manière logicielle pour qu'ils puissent se calibrer séparément et se déplacer de manière synchrone.
L'inversion des câbles est une bonne solution, mais cette machine appartient à mon employeur qui préfère ne pas toucher au matériel (et garder la compatibilité avec l'autre pc avec Mach3)
Dois-je modifier les fichiers .hal et .ini ou est-ce possible avec StepConf ?
I've installed limit switches, one for each motor.
I want to synchronize the motors in software so they can calibrate separately and move synchronously.
Reversing the cables is a good solution, but this machine belongs to my employer, who prefers not to touch the hardware (and maintain compatibility with the other PC with Mach3).
Do I need to modify the .hal and .ini files, or is this possible with StepConf?
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21694
- Thank you received: 7415
09 Sep 2025 12:06 #334684
by tommylight
Replied by tommylight on topic StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
LinuxCNC 2.10 can do tandem axis, i do not know if 2.9.4 can.
You need this for the axis with 2 motors, and this way you can change direction of those motors separately, and this does require home switches for each joint that you already have, so all good.
You need this for the axis with 2 motors, and this way you can change direction of those motors separately, and this does require home switches for each joint that you already have, so all good.
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21694
- Thank you received: 7415
09 Sep 2025 14:53 #334706
by tommylight
Replied by tommylight on topic StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
You can install Mate on Debian as easy as:
sudo apt update
sudo apt install mate-desktop-environment mate-desktop-environment-extras lightdm lightdm-gtk-greeter
log out, choose Mate for desktop environment, log in . This needs to be done only once if you want to continue using Mate. If you want to go back to XFCE, log out, change, log in.
sudo apt update
sudo apt install mate-desktop-environment mate-desktop-environment-extras lightdm lightdm-gtk-greeter
log out, choose Mate for desktop environment, log in . This needs to be done only once if you want to continue using Mate. If you want to go back to XFCE, log out, change, log in.
Please Log in or Create an account to join the conversation.
- International LinuxCNC Users
- Français
- StepConf - tandem axe Y - comment configurer 2 moteurs synchrones
Time to create page: 0.232 seconds