Gantry hal example
- BigJohnT
-

- Offline
- Administrator
-

Less
More
- Posts: 3990
- Thank you received: 994
20 May 2016 18:54 #74890
by BigJohnT
Replied by BigJohnT on topic Gantry hal example
Actually the gantry component and JA14 are quite different and only JA14 handles gantry homing properly including offsets for switches that are not perfect on each joint. I've used the gantry component and JA14 on my test gantry and JA14 was a few minutes to set up and get right, I spent days trying to get the gantry component to work and finally I did. So for a new gantry build you should use JA14. With JA14 after homing in joint mode it automagicly switches to world mode. For any machine that has multiple joints per axis JA14 is the best way to configure the machine. Andy wrote a script for JA that automagicly coverts a non JA configuration to a JA configuration and saves the old configuration files too boot.
JT
JT
Please Log in or Create an account to join the conversation.
- mjohnsonsa
- Offline
- Senior Member
-

Less
More
- Posts: 51
- Thank you received: 0
24 May 2016 04:47 #75023
by mjohnsonsa
Replied by mjohnsonsa on topic Gantry hal example
Does JA14 support uspace? I am using a Mesa 7I76e card so I need uspace support. How do you install that branch?
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19879
- Thank you received: 4642
24 May 2016 12:10 #75036
by andypugh
If you are using Debian Wheezy then you need to set the repository acccording to the last table here using the rt-preempt version
buildbot.linuxcnc.org
You should then be able to select JA14 from the package manager.
The instructions on that page describe editing a sources file, but you can also add the lines to the package manager via the synaptic GUI.
www.ghacks.net/2009/03/08/adding-repositories-to-synaptic/
Replied by andypugh on topic Gantry hal example
Does JA14 support uspace? I am using a Mesa 7I76e card so I need uspace support. How do you install that branch?
If you are using Debian Wheezy then you need to set the repository acccording to the last table here using the rt-preempt version
buildbot.linuxcnc.org
You should then be able to select JA14 from the package manager.
The instructions on that page describe editing a sources file, but you can also add the lines to the package manager via the synaptic GUI.
www.ghacks.net/2009/03/08/adding-repositories-to-synaptic/
Please Log in or Create an account to join the conversation.
- mjohnsonsa
- Offline
- Senior Member
-
Less
More
- Posts: 51
- Thank you received: 0
25 May 2016 22:50 #75090
by mjohnsonsa
Replied by mjohnsonsa on topic Gantry hal example
Andy, where is the documentation on how to configure the JA14 branch?
Please Log in or Create an account to join the conversation.
- mjohnsonsa
- Offline
- Senior Member
-
Less
More
- Posts: 51
- Thank you received: 0
25 May 2016 23:10 - 25 May 2016 23:13 #75091
by mjohnsonsa
Replied by mjohnsonsa on topic Gantry hal example
What am I doing wrong here? I added the rt preempt source but I cannot find a linuxcnc joint axes version, see blow:
root@cnc-router:/home/mjohnson# more /etc/apt/sources.list.d/linuxcnc.list
deb buildbot.linuxcnc.org/ wheezy scratch-rtpreempt
deb-src buildbot.linuxcnc.org/ wheezy scratch-rtpreempt
root@cnc-router:/home/mjohnson# apt-get update
root@cnc-router:/home/mjohnson# apt-cache search linuxcnc
linuxcnc-uspace - PC based motion controller for real-time Linux
linuxcnc-doc-en - PC based motion controller for real-time Linux
linuxcnc-uspace-dev - PC based motion controller for real-time Linux
linuxcnc-doc-fr - PC based motion controller for real-time Linux
linuxcnc-doc-es - PC based motion controller for real-time Linux
truetype-tracer - TTT, the True Type Tracer, an outline-generator.
Please advise on how to get the package, and then where I can read docs on how to configure it (or do I just run pncconf?)
root@cnc-router:/home/mjohnson# more /etc/apt/sources.list.d/linuxcnc.list
deb buildbot.linuxcnc.org/ wheezy scratch-rtpreempt
deb-src buildbot.linuxcnc.org/ wheezy scratch-rtpreempt
root@cnc-router:/home/mjohnson# apt-get update
root@cnc-router:/home/mjohnson# apt-cache search linuxcnc
linuxcnc-uspace - PC based motion controller for real-time Linux
linuxcnc-doc-en - PC based motion controller for real-time Linux
linuxcnc-uspace-dev - PC based motion controller for real-time Linux
linuxcnc-doc-fr - PC based motion controller for real-time Linux
linuxcnc-doc-es - PC based motion controller for real-time Linux
truetype-tracer - TTT, the True Type Tracer, an outline-generator.
Please advise on how to get the package, and then where I can read docs on how to configure it (or do I just run pncconf?)
Last edit: 25 May 2016 23:13 by mjohnsonsa.
Please Log in or Create an account to join the conversation.
- BigJohnT
-
- Offline
- Administrator
-
Less
More
- Posts: 3990
- Thank you received: 994
25 May 2016 23:26 - 25 May 2016 23:28 #75093
by BigJohnT
Replied by BigJohnT on topic Gantry hal example
I don't use Debian I use LinuxMint but here are my notes on JA.
Docs for buildbot branches:
buildbot.linuxcnc.org/doc/
JT
Docs for buildbot branches:
buildbot.linuxcnc.org/doc/
JT
Last edit: 25 May 2016 23:28 by BigJohnT.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4642
25 May 2016 23:31 #75094
by andypugh
I think that's the one. If you look at the extended details in Synaptic:
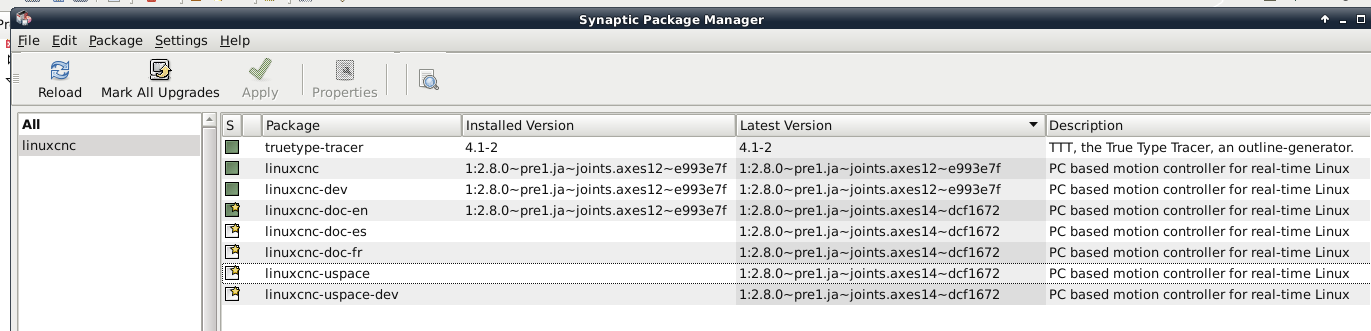
Replied by andypugh on topic Gantry hal example
linuxcnc-uspace - PC based motion controller for real-time Linux
I think that's the one. If you look at the extended details in Synaptic:
Please Log in or Create an account to join the conversation.
- mjohnsonsa
- Offline
- Senior Member
-
Less
More
- Posts: 51
- Thank you received: 0
26 May 2016 00:08 #75097
by mjohnsonsa
Replied by mjohnsonsa on topic Gantry hal example
Okay, I got JA14 installed. When I launched it the attached error occurred trying to convert my config files.
I then ran pncconf to create a new config from scratch instead, but when I try to click forward button it gives a prompt saying that if I selected tandem axes I must specify a master stepper, however, I do not see where I can do that so I am stuck.
What do I do?
I then ran pncconf to create a new config from scratch instead, but when I try to click forward button it gives a prompt saying that if I selected tandem axes I must specify a master stepper, however, I do not see where I can do that so I am stuck.
What do I do?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4642
26 May 2016 00:18 #75098
by andypugh
Hoping that you kept the converted files...
Can you zip-up the whole converted config folder and attach it to a message? It looks like there might be something wrong with the config conversion script that I need to fix.
Replied by andypugh on topic Gantry hal example
Okay, I got JA14 installed. When I launched it the attached error occurred trying to convert my config files.
Hoping that you kept the converted files...
Can you zip-up the whole converted config folder and attach it to a message? It looks like there might be something wrong with the config conversion script that I need to fix.
Please Log in or Create an account to join the conversation.
- mjohnsonsa
- Offline
- Senior Member
-
Less
More
- Posts: 51
- Thank you received: 0
26 May 2016 00:32 #75099
by mjohnsonsa
Replied by mjohnsonsa on topic Gantry hal example
I removed all the Halui stuff and then it launched correctly.
I homed all the axis and it seemed to work fine. I then homed again and after homing the first axis the program froze.
I will mess with it some more and see if that was an unrelated anomaly. Once I killed the process and restarted it seems to be working fine, not sure what caused the crash, is there a debug file anywhere?
I homed all the axis and it seemed to work fine. I then homed again and after homing the first axis the program froze.
I will mess with it some more and see if that was an unrelated anomaly. Once I killed the process and restarted it seems to be working fine, not sure what caused the crash, is there a debug file anywhere?
Please Log in or Create an account to join the conversation.
Time to create page: 0.655 seconds