- Configuring LinuxCNC
- HAL
- HAL Examples
- Emulating lathe compound angle via manipulation of X & Z drives
Emulating lathe compound angle via manipulation of X & Z drives
- slowpoke
- Offline
- Elite Member
-

Less
More
- Posts: 224
- Thank you received: 28
19 Jun 2025 07:34 - 19 Jun 2025 07:34 #330491
by slowpoke
Emulating lathe compound angle via manipulation of X & Z drives was created by slowpoke
Axis GUI for a lathe, using Mesa
I have servos driving the X (cross slide), and Z (carriage) all working.
I also have MPG to manipulate X & Z.
I have removed my compound to make the lathe more rigid, with the rationale that I can emulate the compound via correct step pulse generation of the X & Z drives via the MPG.
Has someone done this?
HAL example?
Thank you
I have servos driving the X (cross slide), and Z (carriage) all working.
I also have MPG to manipulate X & Z.
I have removed my compound to make the lathe more rigid, with the rationale that I can emulate the compound via correct step pulse generation of the X & Z drives via the MPG.
Has someone done this?
HAL example?
Thank you
Last edit: 19 Jun 2025 07:34 by slowpoke.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4753
- Thank you received: 2132
19 Jun 2025 09:37 #330494
by Aciera
Replied by Aciera on topic Emulating lathe compound angle via manipulation of X & Z drives
For jogging there is the 'anglejog' component:
linuxcnc.org/docs/stable/html/man/man9/anglejog.9.html
linuxcnc.org/docs/stable/html/man/man9/anglejog.9.html
The following user(s) said Thank You: besriworld, slowpoke
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
19 Jun 2025 12:27 - 19 Jun 2025 12:52 #330499
by slowpoke
Replied by slowpoke on topic Emulating lathe compound angle via manipulation of X & Z drives
Thank you, and this is what I love about LinuxCNC, it seems that whatever somewhat custom idea you dream up LinuxCNC has the handle to make it happen. It's a tinkerer's candy store.For jogging there is the 'anglejog' component:
linuxcnc.org/docs/stable/html/man/man9/anglejog.9.html
Last edit: 19 Jun 2025 12:52 by slowpoke.
The following user(s) said Thank You: tommylight, besriworld
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
25 Jun 2025 18:38 #330869
by slowpoke
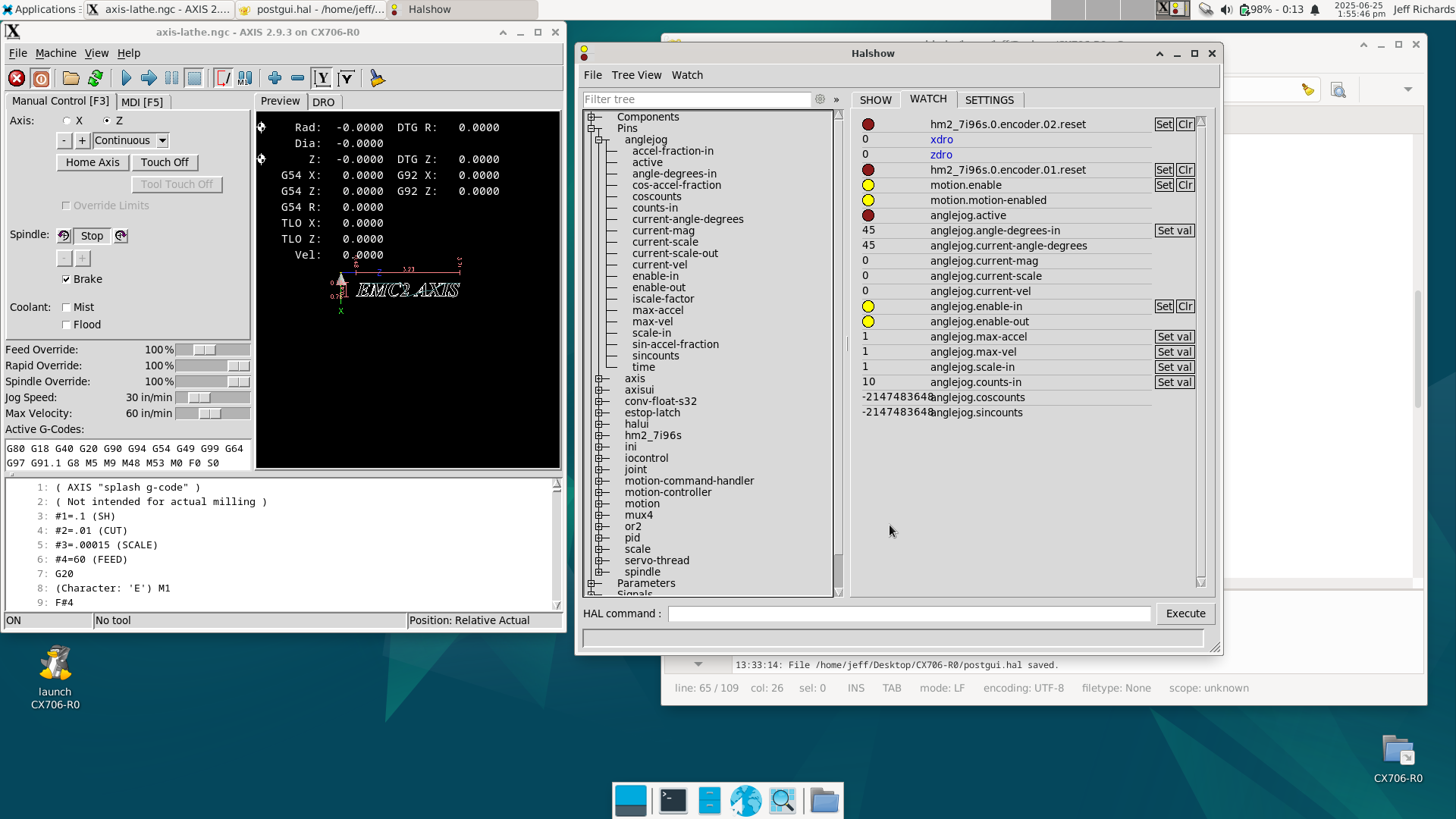
I added anglejog to the real time thread so I can see the parameters in HAL.
I was hoping to just do a little test jog from HAL before connecting coscounts and sincounts to the servos in HAL.
However both those outputs seem to have really large numbers. Please see attached.
is there anything obvious that I'm doing wrong?
Replied by slowpoke on topic Emulating lathe compound angle via manipulation of X & Z drives
I need a little assistance with anglejog please.
For jogging there is the 'anglejog' component:
linuxcnc.org/docs/stable/html/man/man9/anglejog.9.html
Thank you, and this is what I love about LinuxCNC, it seems that whatever somewhat custom idea you dream up LinuxCNC has the handle to make it happen. It's a tinkerer's candy store.
I added anglejog to the real time thread so I can see the parameters in HAL.
I was hoping to just do a little test jog from HAL before connecting coscounts and sincounts to the servos in HAL.
However both those outputs seem to have really large numbers. Please see attached.
is there anything obvious that I'm doing wrong?
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4753
- Thank you received: 2132
26 Jun 2025 06:39 #330884
by Aciera
Replied by Aciera on topic Emulating lathe compound angle via manipulation of X & Z drives
The most likely problem is that you have 'anglejog.current-scale' = '0'.
Note that the 'anglejog.scale-in' value is only sampled when 'anglejog.enable-in' is false. (See 'Notes' in the man page linked above)
You may want to have a look at the anglejog sim config :
configs/sim/axis/anglejog
Note that the 'anglejog.scale-in' value is only sampled when 'anglejog.enable-in' is false. (See 'Notes' in the man page linked above)
You may want to have a look at the anglejog sim config :
configs/sim/axis/anglejog
Attachments:
The following user(s) said Thank You: slowpoke
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
28 Jun 2025 14:40 #330956
by slowpoke
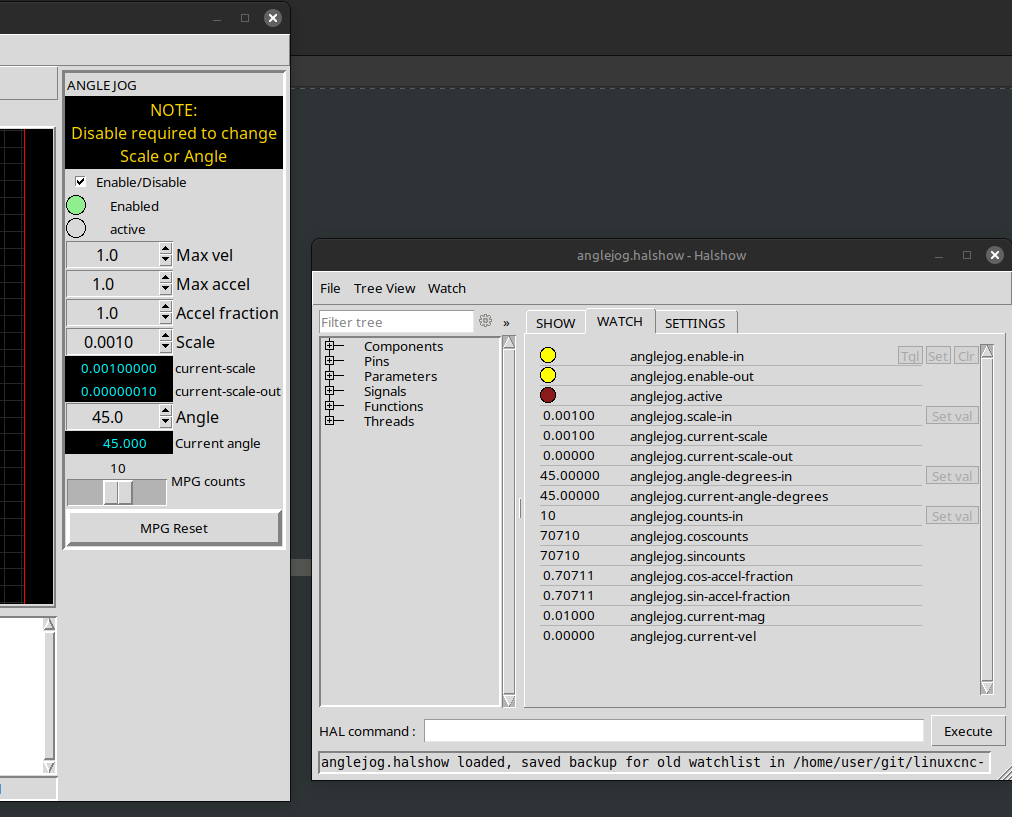
I have motion, however I don't understand the scaling, at the moment with the attached settings, 1 click of the MPG, yields 7.040" of actual Z axis movement.
Changing the scale value, does not change the distance moved it does change how fast the carriage moves; with 1 it's very fast, with 10 it's fast, and with 100 it's a nice comfortable jog speed.
I'm not sure how to correct the actual scaling?

Replied by slowpoke on topic Emulating lathe compound angle via manipulation of X & Z drives
I think I'm almost there...The most likely problem is that you have 'anglejog.current-scale' = '0'.
Note that the 'anglejog.scale-in' value is only sampled when 'anglejog.enable-in' is false. (See 'Notes' in the man page linked above)
You may want to have a look at the anglejog sim config :
configs/sim/axis/anglejog
I have motion, however I don't understand the scaling, at the moment with the attached settings, 1 click of the MPG, yields 7.040" of actual Z axis movement.
Changing the scale value, does not change the distance moved it does change how fast the carriage moves; with 1 it's very fast, with 10 it's fast, and with 100 it's a nice comfortable jog speed.
I'm not sure how to correct the actual scaling?
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4753
- Thank you received: 2132
28 Jun 2025 15:38 - 28 Jun 2025 15:55 #330959
by Aciera
Replied by Aciera on topic Emulating lathe compound angle via manipulation of X & Z drives
I have not used the anglejog component other than playing around with the sim config. As I understand it the 'scale' factor is used to avoid stair stepping in the tool path. Maybe the original discussion can give you some more clues:
forum.linuxcnc.org/38-general-linuxcnc-q...mode?start=10#253252
[edit]
I would tend to use the default values used in the sim config and adjust the
'max_vel', 'max_accel' pins (and possibly 'accel_fraction_in' for fine tuning)
forum.linuxcnc.org/38-general-linuxcnc-q...mode?start=10#253252
[edit]
I would tend to use the default values used in the sim config and adjust the
'max_vel', 'max_accel' pins (and possibly 'accel_fraction_in' for fine tuning)
Last edit: 28 Jun 2025 15:55 by Aciera.
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
29 Jun 2025 12:51 - 29 Jun 2025 12:57 #330998
by slowpoke
Replied by slowpoke on topic Emulating lathe compound angle via manipulation of X & Z drives
Thanks for your help. I should play with the sim config, I'm not sure how to do that?I have not used the anglejog component other than playing around with the sim config. As I understand it the 'scale' factor is used to avoid stair stepping in the tool path. Maybe the original discussion can give you some more clues:
forum.linuxcnc.org/38-general-linuxcnc-q...mode?start=10#253252
[edit]
I would tend to use the default values used in the sim config and adjust the
'max_vel', 'max_accel' pins (and possibly 'accel_fraction_in' for fine tuning)
Last edit: 29 Jun 2025 12:57 by slowpoke.
Please Log in or Create an account to join the conversation.
- slowpoke
- Offline
- Elite Member
-
Less
More
- Posts: 224
- Thank you received: 28
29 Jun 2025 19:25 #331011
by slowpoke
Thanks for all your help!
Replied by slowpoke on topic Emulating lathe compound angle via manipulation of X & Z drives
Okay, figured out what I was doing wrong (anglejog.N.iscale-factor), so I now have angle jogging working.
I have not used the anglejog component other than playing around with the sim config. As I understand it the 'scale' factor is used to avoid stair stepping in the tool path. Maybe the original discussion can give you some more clues:
forum.linuxcnc.org/38-general-linuxcnc-q...mode?start=10#253252
[edit]
I would tend to use the default values used in the sim config and adjust the
'max_vel', 'max_accel' pins (and possibly 'accel_fraction_in' for fine tuning)
Thanks for your help. I should play with the sim config, I'm not sure how to do that?
Thanks for all your help!
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- HAL
- HAL Examples
- Emulating lathe compound angle via manipulation of X & Z drives
Time to create page: 0.324 seconds