How to proper compile, built, and install linuxCNC
- ALittleOffTheRails
-

- Visitor
-

15 Jan 2022 22:53 #231955
by ALittleOffTheRails
Replied by ALittleOffTheRails on topic How to proper compile, built, and install linuxCNC
Standard Wheezy ISO is RTAI not RT_PREEMPT there is a technical difference beteen the 2.
To Quote from the Linuxcnc Download page
[qoute]
LinuxCNC 2.7 Downloads
The Debian 7 Wheezy ISO uses RTAI which LinuxCNC has used as the Realtime layer since the very beginning. This gives the best real-time performance and is generally a better choice for software stepping using a parallel port. However making a stable version of a 4.x Kernel for Stretch (and eventually Buster) has proven difficult, which is partly why we still distribute the EOL Wheezy. This is compatible with Mesa PCI and PCIe and Pico interface boards but is not compatible with Mesa Ethernet interface boards.
[/quote]
If you have a standard install from the Wheezy ISO, you will have to install the RT (rtai) version NOT the uspace (rt_preempt) version.
This includes the linuxcnc development package. Do not mix uspace & rt packages. Use the version that matches your kernel.
So either backup your home directory and configs and reinstall from the Wheezy ISO. Or completely remove ALL instances of Linuxcnc and install the rt (rtai) version not the uspace (rt_preempt) version. They are 2 different animals.
Note you may need to use apt purge rather than apt remove. purge will remove ALL config files, so be sure to back up any files you want to save in your home folder.
To Quote from the Linuxcnc Download page
[qoute]
LinuxCNC 2.7 Downloads
The Debian 7 Wheezy ISO uses RTAI which LinuxCNC has used as the Realtime layer since the very beginning. This gives the best real-time performance and is generally a better choice for software stepping using a parallel port. However making a stable version of a 4.x Kernel for Stretch (and eventually Buster) has proven difficult, which is partly why we still distribute the EOL Wheezy. This is compatible with Mesa PCI and PCIe and Pico interface boards but is not compatible with Mesa Ethernet interface boards.
[/quote]
If you have a standard install from the Wheezy ISO, you will have to install the RT (rtai) version NOT the uspace (rt_preempt) version.
This includes the linuxcnc development package. Do not mix uspace & rt packages. Use the version that matches your kernel.
So either backup your home directory and configs and reinstall from the Wheezy ISO. Or completely remove ALL instances of Linuxcnc and install the rt (rtai) version not the uspace (rt_preempt) version. They are 2 different animals.
Note you may need to use apt purge rather than apt remove. purge will remove ALL config files, so be sure to back up any files you want to save in your home folder.
Please Log in or Create an account to join the conversation.
- Matt Hat
- Offline
- Senior Member
-

Less
More
- Posts: 47
- Thank you received: 2
15 Jan 2022 23:04 #231960
by Matt Hat
Replied by Matt Hat on topic How to proper compile, built, and install linuxCNC
Thanks. Yes it is RTAI. I haven't done a purge, though, remove all from Syn Pckg Manager seemed to work fine. I have tested all versions, master 2.9, 2.8, 2.7 they are all running as long I use the trivkins.c No success though with installation of the rot4thaxiskins.
Error: could not insert module /usr/realtime-3.4-9-rtai-686-pae/modules/linuxcnc/rot4thaxiskins.ko: Unknown symbol in module
./rot4thaxiskins.hal:4: exit value: 1
./rot4thaxiskins.hal:4: insmod for rot4thaxiskins failed, returned -1
See the output of 'dmesg' for more information.
1959
Stopping realtime threads
Unloading hal componentsPlease Log in or Create an account to join the conversation.
- ALittleOffTheRails
-
- Visitor
-
15 Jan 2022 23:06 #231962
by ALittleOffTheRails
Replied by ALittleOffTheRails on topic How to proper compile, built, and install linuxCNC
Once you installed the correct version of linuxcnc are you recompiling the comp ?
Please Log in or Create an account to join the conversation.
- Matt Hat
- Offline
- Senior Member
-
Less
More
- Posts: 47
- Thank you received: 2
15 Jan 2022 23:07 - 15 Jan 2022 23:23 #231963
by Matt Hat
Replied by Matt Hat on topic How to proper compile, built, and install linuxCNC
yes, after install of lncnc I callThe error when loading:
sudo halcompile --install rot4thaxiskins.cdmesg -k will e.g. include
[25614.782021] rot4thaxiskins: Unknown parameter `coordinates'
Last edit: 15 Jan 2022 23:23 by Matt Hat.
Please Log in or Create an account to join the conversation.
- ALittleOffTheRails
-
- Visitor
-
16 Jan 2022 00:07 - 16 Jan 2022 00:13 #231975
by ALittleOffTheRails
Replied by ALittleOffTheRails on topic How to proper compile, built, and install linuxCNC
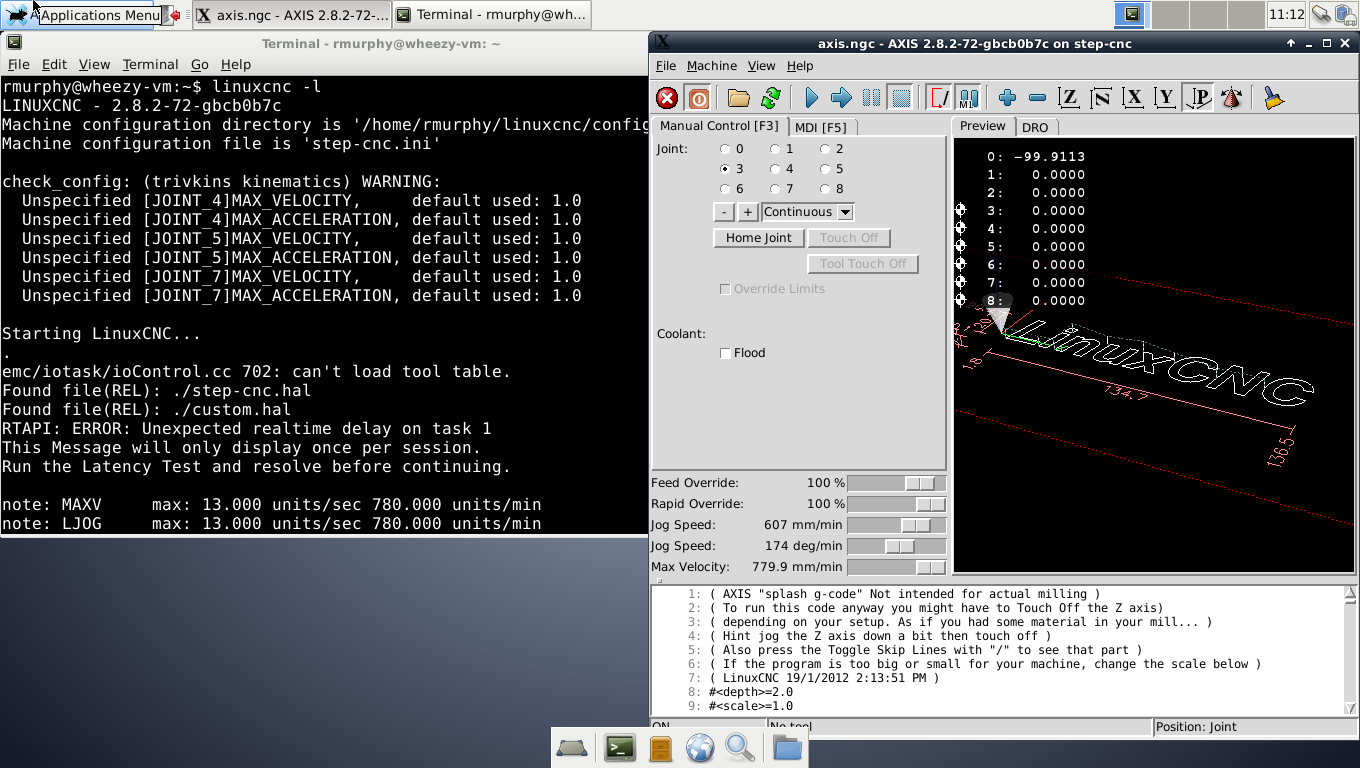
Ok I installed a Wheezy from the ISO to a virtual machine.
Updated Linuxcnc to 2.8.2
Compiled and installed the comp.
Fiddled with the ini & hal files from the wiki to get them to work with 2.8.2
Ran the config and it loaded fine with no issues.
So I'm guessing it has to be something at your end. As far as I can tell the config will load to the axis gui.
Updated Linuxcnc to 2.8.2
Compiled and installed the comp.
Fiddled with the ini & hal files from the wiki to get them to work with 2.8.2
Ran the config and it loaded fine with no issues.
So I'm guessing it has to be something at your end. As far as I can tell the config will load to the axis gui.
Attachments:
Last edit: 16 Jan 2022 00:13 by ALittleOffTheRails.
Please Log in or Create an account to join the conversation.
- Matt Hat
- Offline
- Senior Member
-
Less
More
- Posts: 47
- Thank you received: 2
16 Jan 2022 09:45 - 16 Jan 2022 10:11 #231995
by Matt Hat
Replied by Matt Hat on topic How to proper compile, built, and install linuxCNC
Thank you, such efforts too support is very much appreciated!!
Your right, it is - as in other cases - the config file format that makes the issue.
1) Fresh install of lncnc 2.9 from buildbot.linuxcnc,org
2) sudo halcompile --install rot4thaxiskin.c
3) Open a running config file and let it convert automatically to new format
4) Add the modification from the wiki manually
- First Only add the--> no error. kinematics is loading.
5) adapt the .ini: Most evidently, format changes of
Attention: the wiki defines 8x [AXIS] but now we need 9x [JOINTS]
6) connect
This configs are still quite outside of my circle of competence.
- 9 joints enough for 4 axes with travel limits
- What do we need for the tool offsets UVW, only [JOINTS] it seems?
Your right, it is - as in other cases - the config file format that makes the issue.
1) Fresh install of lncnc 2.9 from buildbot.linuxcnc,org
2) sudo halcompile --install rot4thaxiskin.c
3) Open a running config file and let it convert automatically to new format
4) Add the modification from the wiki manually
- First Only add the
loadrt rot4thaxiskins
setp rot4thaxiskins.H1 415) adapt the .ini: Most evidently, format changes of
[TRAJ] should be empty
[KINS] JOINTS = 9 XZY+ABC+UVW6) connect
net upos-fb joint.6.motor-pos-cmd => joint.6.motor-pos-fb
net vpos-fb joint.7.motor-pos-cmd => joint.7.motor-pos-fb
net wpos-fb joint.8.motor-pos-cmd => joint.8.motor-pos-fbThis configs are still quite outside of my circle of competence.
- 9 joints enough for 4 axes with travel limits
- What do we need for the tool offsets UVW, only [JOINTS] it seems?
Last edit: 16 Jan 2022 10:11 by Matt Hat.
Please Log in or Create an account to join the conversation.
- Matt Hat
- Offline
- Senior Member
-
Less
More
- Posts: 47
- Thank you received: 2
16 Jan 2022 11:05 #232002
by Matt Hat
Replied by Matt Hat on topic How to proper compile, built, and install linuxCNC
Hurray, it is running. Final thing to do is to implement the correct kinematics, recompile rot4thaxiskin.c, and run the machine.
Weird is the code in rot4thaxiskin.c:I am working to fix it, something likemakes more sense to me.
Weird is the code in rot4thaxiskin.c:
m_z = 1. / sin_a * (joint[1] - cos_a * m_y) + H1;m_z = sin_a * joint[1] + cos_a * (joint[2] - H1)+H1;[J1;J2]=[cos.a sin.a; -sin.a cos.a].*[my;mx]
[my;mz]=[cos.a -sin.a; sin.a cos.a].*[J1;J2]
then substitute mz->mz-H1
and substitute J2->J2-H1Please Log in or Create an account to join the conversation.
Time to create page: 0.154 seconds