QTPlasmaC with fourth axis - rotary
- phillc54
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2023 00:34 #274551
by phillc54
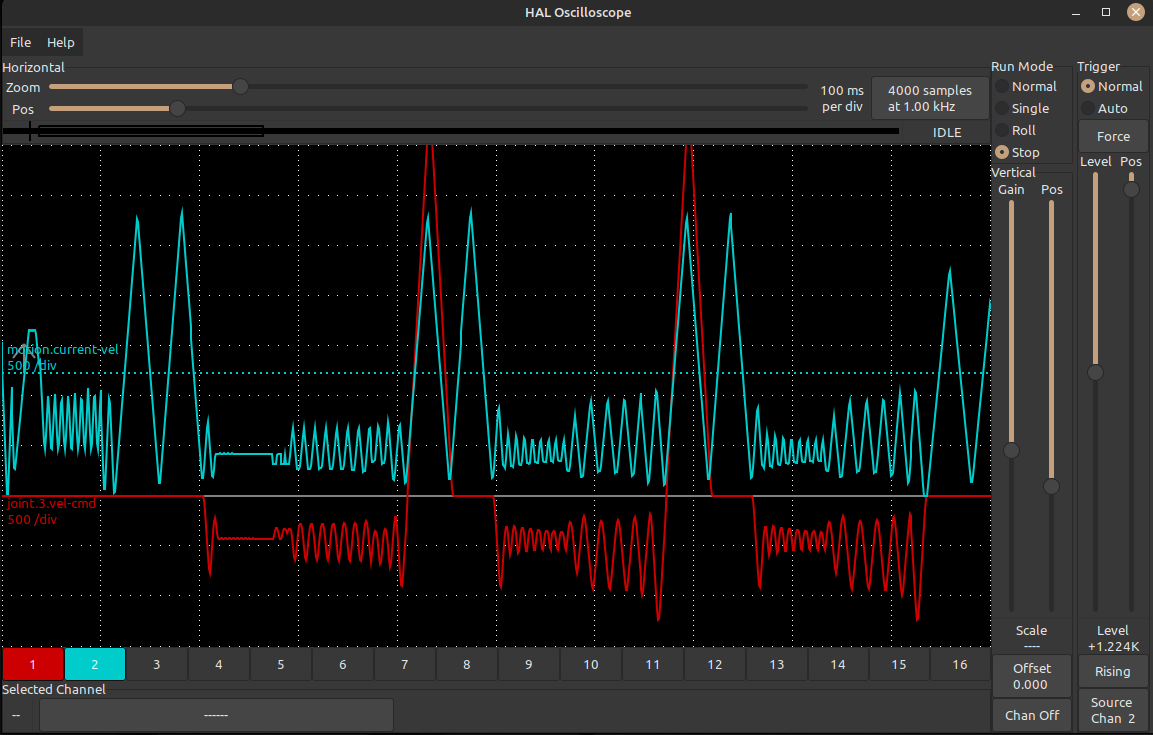
With max acceleration of 50000 and max velocity of 12000 the very best I could get on the standard code was 10500. The last corner was only 4380. These numbers are from motion.current-vel using hal sampler.
The result is attached, column 1 is joint.3.vel-cmd and column 2 is motion.current-vel.
Replied by phillc54 on topic QTPlasmaC with fourth axis - rotary
Not even close...@phil as a sanity check: Are you able to actually have a simulation go at 20'000mm/min?
With max acceleration of 50000 and max velocity of 12000 the very best I could get on the standard code was 10500. The last corner was only 4380. These numbers are from motion.current-vel using hal sampler.
The result is attached, column 1 is joint.3.vel-cmd and column 2 is motion.current-vel.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4717
- Thank you received: 2112
01 Jul 2023 07:47 - 01 Jul 2023 07:58 #274560
by Aciera
Replied by Aciera on topic QTPlasmaC with fourth axis - rotary
Ok, Just found out that I have to run this simulation on a pc with an RT kernel otherwise the maximum velocity gets capped.
Last edit: 01 Jul 2023 07:58 by Aciera.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2023 08:37 #274562
by phillc54
Replied by phillc54 on topic QTPlasmaC with fourth axis - rotary
Is that on a virtual machine?
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4717
- Thank you received: 2112
01 Jul 2023 10:09 #274574
by Aciera
Replied by Aciera on topic QTPlasmaC with fourth axis - rotary
No, on physical PCs. The usual sim stuff I do on my everyday non-RT machine. But with this I noticed that no matter what (crazy) numbers I put into the ini file all moves, even if it involved just the X axis, maxed out well below 10m/min. Since I moved the testing to the PC running an RT kernel I can now simulate moves with 100m/min without a problem.
I'm not yet sure if this has any implications on my results regarding coordinated 4axis speed.
I'm not yet sure if this has any implications on my results regarding coordinated 4axis speed.
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2023 10:13 #274576
by phillc54
Replied by phillc54 on topic QTPlasmaC with fourth axis - rotary
Is it the same sim config or is it possible the “slow” machine has the max velocity restricted in the [TRAJ] section.
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4717
- Thank you received: 2112
01 Jul 2023 11:33 #274592
by Aciera
Replied by Aciera on topic QTPlasmaC with fourth axis - rotary
Aw jeez, you called it. x)
So, never mind. I had better spent my time looking for my glasses.")
So, never mind. I had better spent my time looking for my glasses.
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2023 11:42 #274594
by phillc54
Replied by phillc54 on topic QTPlasmaC with fourth axis - rotary
There are so many variables to keep track of. This has been an interesting experiment, I hope someone figures out how to get some decent look ahead for all axes in the not too distant future.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4717
- Thank you received: 2112
01 Jul 2023 11:50 #274596
by Aciera
Replied by Aciera on topic QTPlasmaC with fourth axis - rotary
Now I can also see the jerky movement that I was expecting:
It's sure a lot faster than it was before
It's sure a lot faster than it was before
Attachments:
The following user(s) said Thank You: phillc54, rodw, snowgoer540
Please Log in or Create an account to join the conversation.
- mariusl
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
03 Jul 2023 09:09 #274685
by mariusl
Regards
Marius
www.bluearccnc.com
Replied by mariusl on topic QTPlasmaC with fourth axis - rotary
So I would think the question to ask then is it useable as is or not?
Regards
Marius
www.bluearccnc.com
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4717
- Thank you received: 2112
03 Jul 2023 16:01 #274696
by Aciera
Replied by Aciera on topic QTPlasmaC with fourth axis - rotary
The problem seems to be that you would need insane acceleration values to reach feedrates of 20m/min with the one line look ahead. And of course the shorter the segments the higher the acceleration would need to be.
It's like driving on a road in fog, because you can't see what lies ahead you can only go so fast so you can react to changes. The thicker the fog the slower you go. Unless you could brake/speed up instantly, of course.
So, as I see it at least, this is beyond what LinuxCNC can do in its current state.
It's like driving on a road in fog, because you can't see what lies ahead you can only go so fast so you can react to changes. The thicker the fog the slower you go. Unless you could brake/speed up instantly, of course.
So, as I see it at least, this is beyond what LinuxCNC can do in its current state.
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.658 seconds