QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
- Lcvette
-

- Offline
- Moderator
-

Less
More
- Posts: 1624
- Thank you received: 755
27 Feb 2026 19:33 #343620
by Lcvette
Replied by Lcvette on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
you can adjust the vtk code to offer dynamic plot functionality. you need to add in code to correctly follow the tool and define which components of the machine remain stationary and which have motion and assign the plot constraints to match.
this has been a planned upgrade for a while now but we have a bunch going on with the move to pyside6 qt6 so this is kinda down on priority list as most folks don't both with machine simulation so its a minority "want" at the moment.
if you want to dig into the vtk display and see if you can sort some things out that would be fantastic. i have a branch already that has some good work in it where i was working on multi axis which is pretty brutal when it takes so long to test each change. I will see if i can catch up that old branch and leave the sections i was working with notated and commented out as a starting point but it will likely be next week before i can even do it since i have a pyside system currently setup as dev.
this has been a planned upgrade for a while now but we have a bunch going on with the move to pyside6 qt6 so this is kinda down on priority list as most folks don't both with machine simulation so its a minority "want" at the moment.
if you want to dig into the vtk display and see if you can sort some things out that would be fantastic. i have a branch already that has some good work in it where i was working on multi axis which is pretty brutal when it takes so long to test each change. I will see if i can catch up that old branch and leave the sections i was working with notated and commented out as a starting point but it will likely be next week before i can even do it since i have a pyside system currently setup as dev.
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-

Less
More
- Posts: 119
- Thank you received: 2
28 Feb 2026 07:16 #343635
by amanker
Replied by amanker on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
Yes, You are absolutely right. Vismach is not important at all. I also think so. Thats why really few persons are using this.
If you can just give me initial lead which files I should look for? I tried to find vtk_backplot.py file in instalaltion but didnt find.
If you can just give me initial lead which files I should look for? I tried to find vtk_backplot.py file in instalaltion but didnt find.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4706
- Thank you received: 2106
28 Feb 2026 07:40 #343636
by Aciera
Replied by Aciera on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
For an example on how to implement toolpath plotting in work coordinates using vtk see:
github.com/Sigma1912/vtk-vismach
'Capture()' embeds an invisible actor in the model that can then be used to track the transformation matrices for the tooltip and the work which can then be used to plot the toolpath.
github.com/Sigma1912/vtk-vismach
'Capture()' embeds an invisible actor in the model that can then be used to track the transformation matrices for the tooltip and the work which can then be used to plot the toolpath.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4706
- Thank you received: 2106
28 Feb 2026 07:51 #343637
by Aciera
Replied by Aciera on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
Capture class:
github.com/Sigma1912/vtk-vismach/blob/main/vtk_vismach.py#L832
Plotter class:
github.com/Sigma1912/vtk-vismach/blob/main/vtk_vismach.py#L742
tool->work transformation matrix is calculated in the update() method:
github.com/Sigma1912/vtk-vismach/blob/main/vtk_vismach.py#L796
Works for me.
github.com/Sigma1912/vtk-vismach/blob/main/vtk_vismach.py#L832
Plotter class:
github.com/Sigma1912/vtk-vismach/blob/main/vtk_vismach.py#L742
tool->work transformation matrix is calculated in the update() method:
github.com/Sigma1912/vtk-vismach/blob/main/vtk_vismach.py#L796
Works for me.
Please Log in or Create an account to join the conversation.
- Sandro
- Offline
- Senior Member
-

Less
More
- Posts: 77
- Thank you received: 37
28 Feb 2026 09:09 - 28 Feb 2026 09:22 #343642
by Sandro
Replied by Sandro on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
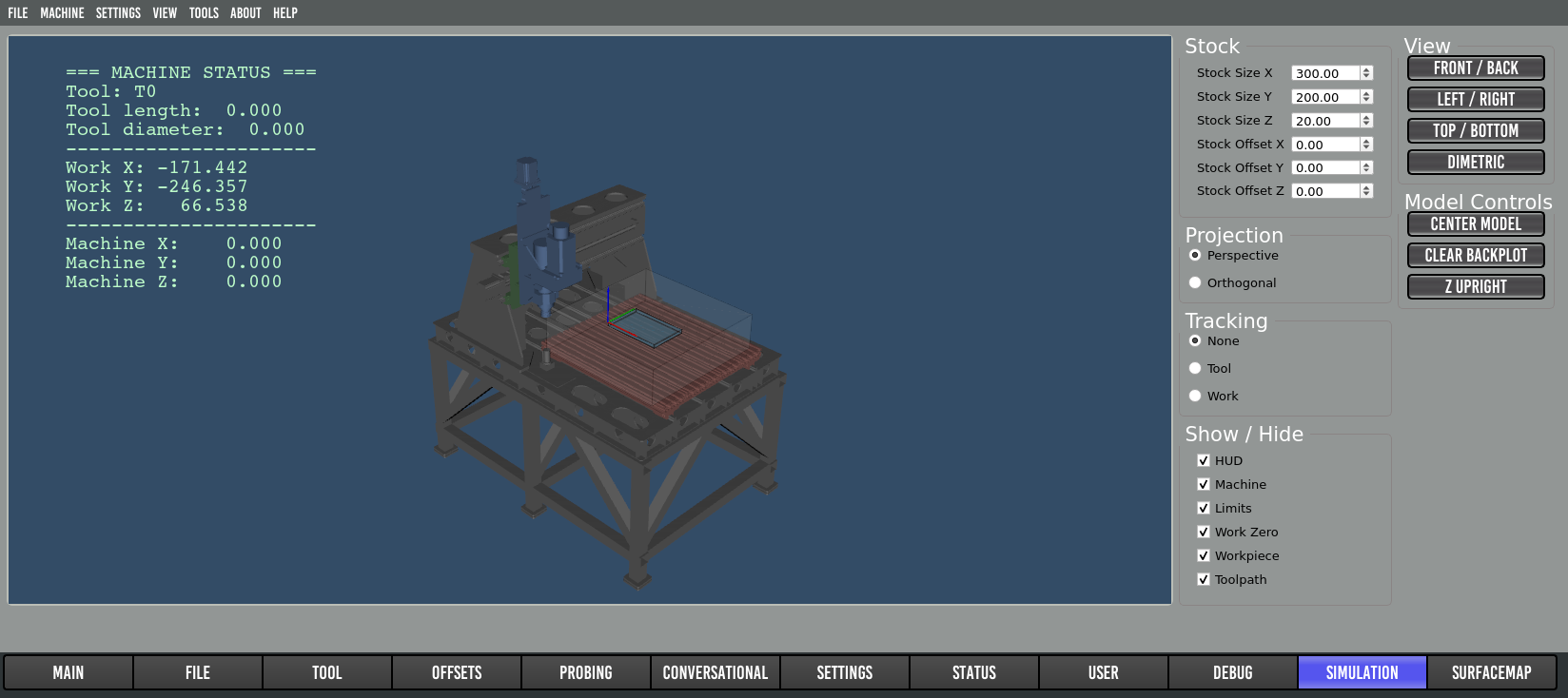
Based on Acieras vtk vismach integration I've made a usertab for probe basic. The files are a drop in simulation config which should get you going. Credit for the code goes to Aciera.
github.com/bildobodo/probe_basic_vtk_sim_gcode
github.com/bildobodo/probe_basic_vtk_sim_gcode
Attachments:
Last edit: 28 Feb 2026 09:22 by Sandro.
Please Log in or Create an account to join the conversation.
- Lcvette
-
- Offline
- Moderator
-
Less
More
- Posts: 1624
- Thank you received: 755
28 Feb 2026 14:01 #343654
by Lcvette
Replied by Lcvette on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
@Aciera you should come play with the primary vtk display for qtpyvcp!! looks like you have sorted a good bit out, would love to have it native without needing a secondary add-in for simulation.
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 2
02 Mar 2026 13:30 #343729
by amanker
 Thanks for giving such a detailed guide, I tried to solve it by looking at code, but I couldnt. How ever I managed to solve it, But its really not a solution.
Thanks for giving such a detailed guide, I tried to solve it by looking at code, but I couldnt. How ever I managed to solve it, But its really not a solution.
Replied by amanker on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
Attachments:
Please Log in or Create an account to join the conversation.
- Lcvette
-
- Offline
- Moderator
-
Less
More
- Posts: 1624
- Thank you received: 755
12 Mar 2026 16:04 #344175
by Lcvette
Replied by Lcvette on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
we are revamping many things in the pyside6 version currently, 2 of the things being worked on is vtk and the gcode plotter. both are seeing some very big changes, so i will add this to the list of things to add some simulation functionality to.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 2
18 Mar 2026 05:39 #344450
by amanker
Replied by amanker on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
I have added 4th axis rotary and 5th axis tilting head, bascially XYZAB configuration. In vismach it moves machine parts (rotary and tilting head) as i move A/B axis. But tool remains at same loaction, it moves on xyz only.
Please Log in or Create an account to join the conversation.
- Lcvette
-
- Offline
- Moderator
-
Less
More
- Posts: 1624
- Thank you received: 755
19 Mar 2026 00:59 #344505
by Lcvette
Replied by Lcvette on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
I've spent the last few days working on the backplot and simulation and just about have it sorted i think. but this will be in the pyside6 release only which is a few weeks out from being primetime ready after testing.
Here is simultaneous impeller simulation on youtube:
Here is simultaneous impeller simulation on youtube:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Moderators: KCJ, Lcvette
Time to create page: 0.296 seconds