Bug found in qtdragon_hd
- ucancallmebob89
- Offline
- Senior Member
-

Less
More
- Posts: 44
- Thank you received: 8
11 Dec 2021 03:42 #228841
by ucancallmebob89
Bug found in qtdragon_hd was created by ucancallmebob89
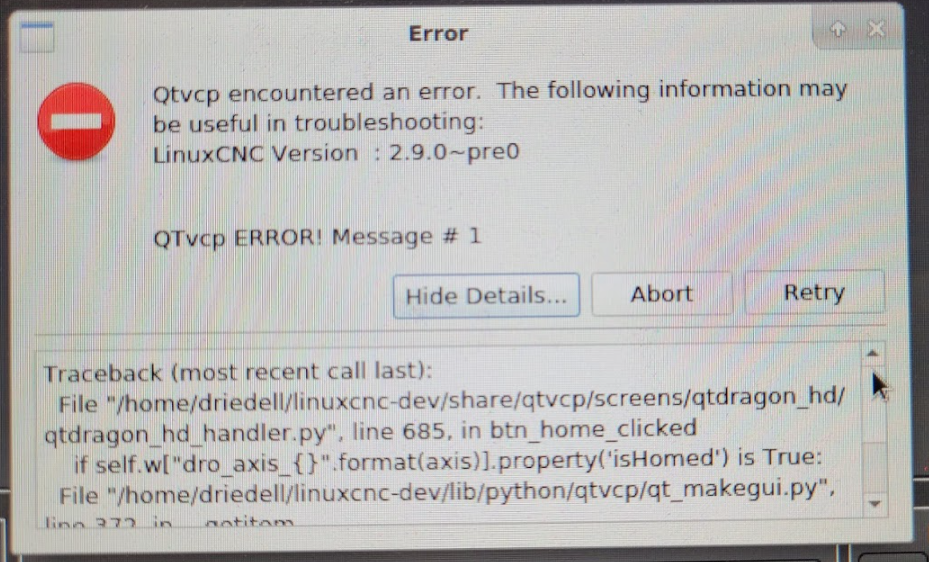
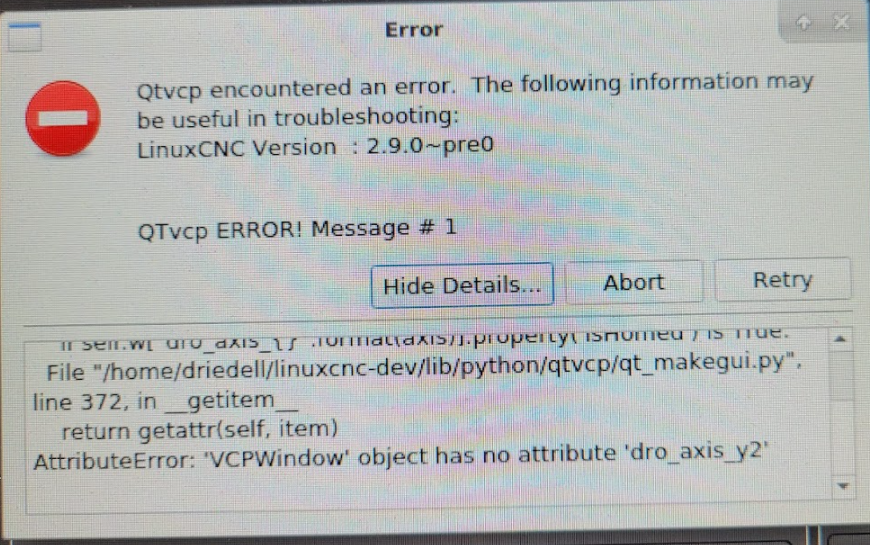
Getting this error any time I try to home one of the axes after they are already homed. Looks like it has something to do with a missing attribute. Anyone else seeing this error?
Attachments:
Please Log in or Create an account to join the conversation.
- ucancallmebob89
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 8
11 Dec 2021 03:55 #228843
by ucancallmebob89
Replied by ucancallmebob89 on topic Bug found in qtdragon_hd
@persei8 Also, would it be possible to add a "go to zero" button under the DRO section for each axis in qtdragon_hd? I'm loving this screenset so far.
Please Log in or Create an account to join the conversation.
- ucancallmebob89
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 8
11 Dec 2021 05:54 #228847
by ucancallmebob89
Replied by ucancallmebob89 on topic Bug found in qtdragon_hd
Digging into this, it looks like the offending code is originating here in qtdragon_hd_handler.py:
def btn_home_clicked(self):
joint = self.w.sender().property('joint')
axis = INFO.GET_NAME_FROM_JOINT.get(joint).lower()
if self.w["dro_axis_{}".format(axis)].property('isHomed') is True:
ACTION.SET_MACHINE_UNHOMED(joint)
else:
ACTION.SET_MACHINE_HOMING(joint)
I'm not sure where it's getting 'y2' from. In the qtdragon_hd.ui file I see references to dro_axis_x, dro_axis_y, dro_axis_z and dro_axis_a.
My machine is a dual-Y gantry, but in my .ini file they're just listed as AXIS_X, AXIS_Y, and AXIS_Z, and JOINT_1 through JOINT_3.
def btn_home_clicked(self):
joint = self.w.sender().property('joint')
axis = INFO.GET_NAME_FROM_JOINT.get(joint).lower()
if self.w["dro_axis_{}".format(axis)].property('isHomed') is True:
ACTION.SET_MACHINE_UNHOMED(joint)
else:
ACTION.SET_MACHINE_HOMING(joint)
I'm not sure where it's getting 'y2' from. In the qtdragon_hd.ui file I see references to dro_axis_x, dro_axis_y, dro_axis_z and dro_axis_a.
My machine is a dual-Y gantry, but in my .ini file they're just listed as AXIS_X, AXIS_Y, and AXIS_Z, and JOINT_1 through JOINT_3.
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-

Less
More
- Posts: 7317
- Thank you received: 2147
11 Dec 2021 08:45 #228862
by cmorley
Replied by cmorley on topic Bug found in qtdragon_hd
try changing the code to this
def btn_home_clicked(self):
joint = self.w.sender().property('joint')
if STATUS.is_joint_homed(joint) == True:
ACTION.SET_MACHINE_UNHOMED(joint)
else:
ACTION.SET_MACHINE_HOMING(joint)
The following user(s) said Thank You: ucancallmebob89
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7317
- Thank you received: 2147
11 Dec 2021 08:47 #228863
by cmorley
Replied by cmorley on topic Bug found in qtdragon_hd
What does:
[KINS]
KINEMATICS =
say in the INI please
[KINS]
KINEMATICS =
say in the INI please
Please Log in or Create an account to join the conversation.
- ucancallmebob89
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 8
11 Dec 2021 14:02 #228876
by ucancallmebob89
Replied by ucancallmebob89 on topic Bug found in qtdragon_hd
I attached my .ini. The KINS section is:
Haven't been able to try your other suggestion yet, hopefully a bit later today.
[KINS]
KINEMATICS = trivkins coordinates=XYYZ kinstype=BOTH
JOINTS = 4Haven't been able to try your other suggestion yet, hopefully a bit later today.
Please Log in or Create an account to join the conversation.
- ucancallmebob89
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 8
11 Dec 2021 16:13 - 11 Dec 2021 16:15 #228878
by ucancallmebob89
Replied by ucancallmebob89 on topic Bug found in qtdragon_hd
Ok this partly worked, it's no longer throwing that error.
What I'm seeing now is that once all 3 axes are homed, pressing the Home X button will unhome X, then pressing it again will rehome X. The same is true for Y.
The current issue is that the Home Z button is being applied to the Y axis as well. Maybe because of the order of my axes in my .ini? I have them defined as XYYZ instead of XYZY.
What I'm seeing now is that once all 3 axes are homed, pressing the Home X button will unhome X, then pressing it again will rehome X. The same is true for Y.
The current issue is that the Home Z button is being applied to the Y axis as well. Maybe because of the order of my axes in my .ini? I have them defined as XYYZ instead of XYZY.
Attachments:
Last edit: 11 Dec 2021 16:15 by ucancallmebob89.
Please Log in or Create an account to join the conversation.
- ucancallmebob89
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 8
11 Dec 2021 16:18 #228879
by ucancallmebob89
Replied by ucancallmebob89 on topic Bug found in qtdragon_hd
Yeah it looks like in QTDesigner the "Home Z" button is hardcoded to joint[2], so I need to rearrange them in my .ini. I'll try this and report back.
Please Log in or Create an account to join the conversation.
- ucancallmebob89
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 8
11 Dec 2021 17:13 #228881
by ucancallmebob89
Replied by ucancallmebob89 on topic Bug found in qtdragon_hd
Ok so after reordering my joints to XYZY in my .ini and .hal files, the individual homing is working correctly. I included both files for anyone who runs into this in the future.
I would recommend that the code snippet that @cmorley pasted above be committed, since it simplifies the readability of that function.
I would recommend that the code snippet that @cmorley pasted above be committed, since it simplifies the readability of that function.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
Moderators: cmorley
Time to create page: 0.127 seconds