- Hardware & Machines
- CNC Machines
- Milling Machines
- Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
10 Jun 2022 18:01 - 10 Jun 2022 18:10 #244894
by new2linux
Replied by new2linux on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Many thanks, for all the help, I have not commanded 1.0 VDC to set proper I think. How do I command the 1.0 volt?
Thanks!!
Edit: Command from Test/Offset Pot4 is referenced in A-M-C data-sheet AN-051; use POT 4 to as an on-board signal source for testing purposes.
Thanks!!
Edit: Command from Test/Offset Pot4 is referenced in A-M-C data-sheet AN-051; use POT 4 to as an on-board signal source for testing purposes.
Last edit: 10 Jun 2022 18:10 by new2linux.
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
12 Jun 2022 17:41 - 13 Jun 2022 14:39 #245012
by new2linux
Replied by new2linux on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Many thanks for all the great help. The following pics show the ".hal traces" reflecting the adjusting of Pot 3 CCW (this is what I believe is needed, not CW) to change the "velocity gain". I have many more pics, but read the name of file for settings, some say "same" this means the only change is POT3.Many thanks!
Edit: The velocity gain (Pot 3) turns, is part of the name of file. Feed 60 in most all traces.
Do I need more velocity gain?
Many thanks.
Edit: The velocity gain (Pot 3) turns, is part of the name of file. Feed 60 in most all traces.
Do I need more velocity gain?
Many thanks.
Last edit: 13 Jun 2022 14:39 by new2linux.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
13 Jun 2022 15:43 - 13 Jun 2022 15:44 #245075
by Todd Zuercher
Replied by Todd Zuercher on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
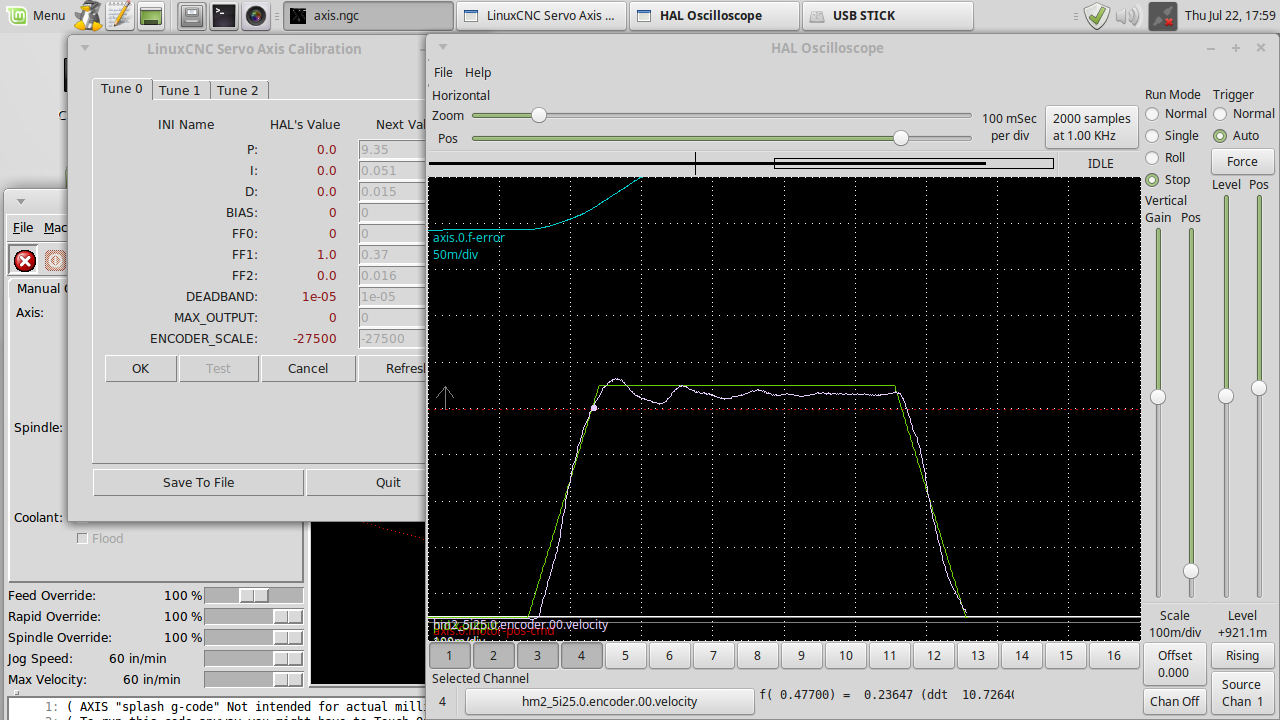
Can you show us a trace with FF1=1, and all other P=0, I=0, D=0, and FF2=0? This should show a smooth symmetrical trapezoidal command for the PID output (your green trace).
What are your settings on the drive for SW2 (1-4) and SW3 (1-10)? Have you made any adjustments to Pot 1?
What are your settings on the drive for SW2 (1-4) and SW3 (1-10)? Have you made any adjustments to Pot 1?
Last edit: 13 Jun 2022 15:44 by Todd Zuercher.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
13 Jun 2022 16:13 - 14 Jun 2022 14:01 #245079
by new2linux
Replied by new2linux on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Todd, Many thanks! The cover has never been off, so factory settings inside, the outside setting were set back to as factory (or as required for this application). This
includes POT 1=FullCCW. The trace as you requested is below with FF1=1 All others =0.0 (see pic), this is highest resolution (200m/div), next units you can't see the top.
Last edit: 14 Jun 2022 14:01 by new2linux. Reason: linked post did not save proper
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
14 Jun 2022 13:32 - 14 Jun 2022 13:40 #245117
by Todd Zuercher
Replied by Todd Zuercher on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Ok that move and traces are probably what you should use to tune the velocity loop in the drive. If you are still in contact with the AMC tech, that trace would probably be very helpful for him to suggest the next tuning steps you should take. That should be outputting a steady constant voltage signal to the drive of 1volt (I think.) Your goal is to get the purple line to follow the green line as closely as possible with minimal oscillations.
I'm guessing that pot1 will need turned clock wise some amount. You may or may not need to adjust some of the jumpers, to reduce the oscillations seen there. But I really don't know what their affect will be.
Also what is the setting you have for SW1-3? (I think all of the first 4 switches on SW1 (1,2,3,4) should all be in the off positions.)
I'm guessing that pot1 will need turned clock wise some amount. You may or may not need to adjust some of the jumpers, to reduce the oscillations seen there. But I really don't know what their affect will be.
Also what is the setting you have for SW1-3? (I think all of the first 4 switches on SW1 (1,2,3,4) should all be in the off positions.)
Last edit: 14 Jun 2022 13:40 by Todd Zuercher.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
14 Jun 2022 13:47 #245121
by Todd Zuercher
Replied by Todd Zuercher on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
You must keep all of the other PID settings in Linuxcnc at zero while you are tuning the drive's velocity loop. Otherwise you are trying to hit a moving target and you will never accomplish anything.
Similarly as long as the drive's velocity loop is untuned it will be impossible to tune the PID loop in Linuxcnc. (It would be like trying to control the position of a bowling ball on the end of a bungee cord.)
Similarly as long as the drive's velocity loop is untuned it will be impossible to tune the PID loop in Linuxcnc. (It would be like trying to control the position of a bowling ball on the end of a bungee cord.)
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
14 Jun 2022 14:42 #245128
by new2linux
Replied by new2linux on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Todd, Many thanks to you and all the others that make this forum possible! The current settings of SW1 & Pot 1 to 4 as follows.
As short review to set POT 1 to 4, back to factory settings: POT 1= Full CCW; POT 2= Full CW: POT 3= Full CW; POT 4= Mid-Point (Full CCW 14 turns & CW 7)
The setting as of now: The SW1-1-6 are all OFF, to the outside of the drive. POT 1= Full CCW; POT 2= 11 turns: POT 3= 6.5 Turns CCW; POT 4= Mid-Point (Full CCW 14 turns & CW 7). Factory settings for any settings not referenced here.
This is from A-M-C engineer:
For brushed motor operation, switch SW1-2-OFF and to test operation with POT4, set SW1-4-OFF.
11 turns on POT 2 to limit the motor current: With the AB15A100, the continuous current limit is 7.5A. Therefore, the equation is ((Motor Cont Current)/7.5A)*12+1=#number of clockwise potentiometer turns from fully counterclockwise.
Yes, use POT4 to prevent motors from "free travel"
Many thanks!!
As short review to set POT 1 to 4, back to factory settings: POT 1= Full CCW; POT 2= Full CW: POT 3= Full CW; POT 4= Mid-Point (Full CCW 14 turns & CW 7)
The setting as of now: The SW1-1-6 are all OFF, to the outside of the drive. POT 1= Full CCW; POT 2= 11 turns: POT 3= 6.5 Turns CCW; POT 4= Mid-Point (Full CCW 14 turns & CW 7). Factory settings for any settings not referenced here.
This is from A-M-C engineer:
For brushed motor operation, switch SW1-2-OFF and to test operation with POT4, set SW1-4-OFF.
11 turns on POT 2 to limit the motor current: With the AB15A100, the continuous current limit is 7.5A. Therefore, the equation is ((Motor Cont Current)/7.5A)*12+1=#number of clockwise potentiometer turns from fully counterclockwise.
Yes, use POT4 to prevent motors from "free travel"
Many thanks!!
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
14 Jun 2022 16:12 - 14 Jun 2022 17:41 #245133
by new2linux
Replied by new2linux on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Attached are pic of the hal trace with only the POT 1 CW; as per the file name. Last pic is at CW 6.0 in full screen. If I try to increase (more CW) the motor will start to make noise, with the F2 down the motor as very faint vibrations, very stiff to turn by hand. The traces start at 0.0 by 1/2 turn, until get to 6.0. This pic I used the "test" each time, makes the differrance. I can go all the way back to 0.0 turns of POT 1 if this is needed. The trace looks best yet!! This is FF1=1; 60"/Min Feed.
Edit: 2ND PIC Shows trace with FF1=1, POT1=5.5TurnsCW; POT3=6.5TurnsCCW
Edit: 2ND PIC Shows trace with FF1=1, POT1=5.5TurnsCW; POT3=6.5TurnsCCW
Last edit: 14 Jun 2022 17:41 by new2linux.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
14 Jun 2022 17:30 #245139
by Todd Zuercher
Replied by Todd Zuercher on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
That is looking much much better. (I don't see the other images you mention)
If you can get rid of the little bit of overshoot and wobble at the beginning of the cruise phase of the move that would be better, maybe 5 or 5.5 turns. It should be quiet with no changes of input voltage. But if that is as good as you can get it, you might be ready to try tuning the PID loop in Linuxcnc.
If you can get rid of the little bit of overshoot and wobble at the beginning of the cruise phase of the move that would be better, maybe 5 or 5.5 turns. It should be quiet with no changes of input voltage. But if that is as good as you can get it, you might be ready to try tuning the PID loop in Linuxcnc.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
14 Jun 2022 17:47 #245140
by Todd Zuercher
Replied by Todd Zuercher on topic Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
One thing I don't like in your last image is the delay between the start of the signal and the response of movement. Looks like it is nearly 20msec.
It may be worth asking the AMC tech if there is a way to improve that response without increasing instability. (making it buzz)
It may be worth asking the AMC tech if there is a way to improve that response without increasing instability. (making it buzz)
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Set up using AMC AB15A100 drives, brushed DC motor Prototrak Plus with Encoders
Time to create page: 0.637 seconds