Need help for school Project with mesa 7i96
- Stubenrocker3
- Offline
- New Member
-

Less
More
- Posts: 8
- Thank you received: 0
09 Feb 2019 15:34 #126060
by Stubenrocker3
Need help for school Project with mesa 7i96 was created by Stubenrocker3
Hello guys!
I'm a german student and for a school project, called "P-Seminar" our goal was to build a milling machine. To controll it I want to use Linuxcnc and the mesa 7i96 board. I managed to create a configuration file that opens without any errors or problems, but if i want to move the axis my motor still won't move. I also tried messuring the signal and if i move the axis in a negative direction I get a 4.8V signal on Dir+ but no Step+ signal. It would be great if you helped me, thank you in advance!
These are my motors and drivers:
www.amazon.de/ACT-Motor-23HS8840D8P1-C-3...mation/dp/B07C2XPV85
www.amazon.de/ACT-Motor-18-50VDC-3D-Prin...trumen/dp/B01FFSFN8U
Here are my conf files(I'm using Linuxcnc 2.8):
I'm a german student and for a school project, called "P-Seminar" our goal was to build a milling machine. To controll it I want to use Linuxcnc and the mesa 7i96 board. I managed to create a configuration file that opens without any errors or problems, but if i want to move the axis my motor still won't move. I also tried messuring the signal and if i move the axis in a negative direction I get a 4.8V signal on Dir+ but no Step+ signal. It would be great if you helped me, thank you in advance!
These are my motors and drivers:
www.amazon.de/ACT-Motor-23HS8840D8P1-C-3...mation/dp/B07C2XPV85
www.amazon.de/ACT-Motor-18-50VDC-3D-Prin...trumen/dp/B01FFSFN8U
Here are my conf files(I'm using Linuxcnc 2.8):
Please Log in or Create an account to join the conversation.
- tommylight
-

- Online
- Moderator
-

Less
More
- Posts: 21734
- Thank you received: 7425
09 Feb 2019 19:25 #126070
by tommylight
Replied by tommylight on topic Need help for school Project with mesa 7i96
In the INI file you have:
DIRSETUP = 1000
DIRHOLD = 1000
STEPLEN = 1000
STEPSPACE = 1000
set those to at least 15000 for all axis, afterwards you can lower those values gradually if you need to.
DIRSETUP = 1000
DIRHOLD = 1000
STEPLEN = 1000
STEPSPACE = 1000
set those to at least 15000 for all axis, afterwards you can lower those values gradually if you need to.
The following user(s) said Thank You: Stubenrocker3
Please Log in or Create an account to join the conversation.
- Stubenrocker3
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
10 Feb 2019 09:03 - 10 Feb 2019 09:03 #126133
by Stubenrocker3
Replied by Stubenrocker3 on topic Need help for school Project with mesa 7i96
Thank you!
Now as I try moving the axis still nothing moves and i get following error.
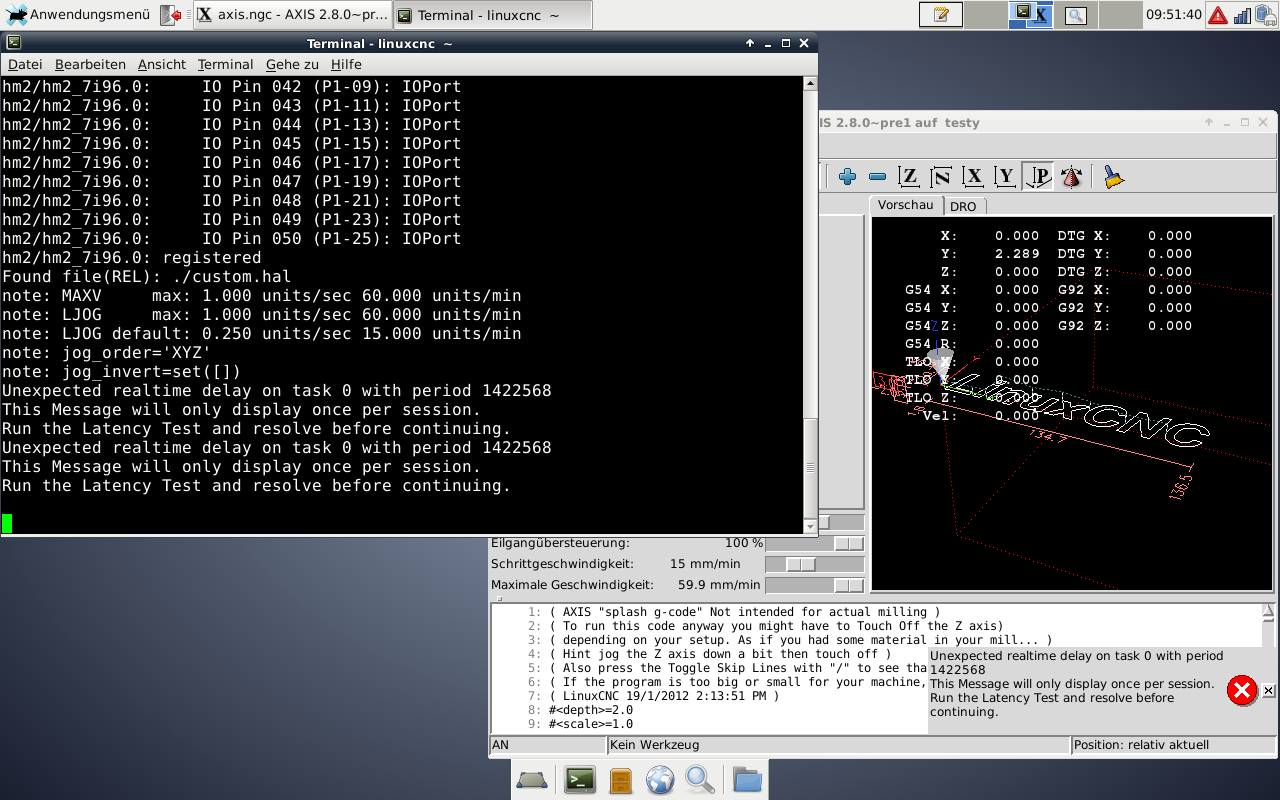
Now as I try moving the axis still nothing moves and i get following error.
Attachments:
Last edit: 10 Feb 2019 09:03 by Stubenrocker3.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Online
- Moderator
-
Less
More
- Posts: 21734
- Thank you received: 7425
10 Feb 2019 12:16 - 10 Feb 2019 12:21 #126137
by tommylight
Replied by tommylight on topic Need help for school Project with mesa 7i96
There is something wrong with your config as a servo period of 1.4something milion is not right, and that shows that your computer has a very high latency that looks to be unusable.
Can you post your config files here so we can try to figure out what is going on.
Sorry just found them above.
The servo period should be 1000000 ( one million ), the display section for max_velocity should be something more than 1mm per second that is 60mm per minute and
DEFAULT_LINEAR_VELOCITY = 0.250000
MAX_LINEAR_VELOCITY = 1.000000
MIN_LINEAR_VELOCITY = 0.010000
DEFAULT_ANGULAR_VELOCITY = 0.250000
MAX_ANGULAR_VELOCITY = 1.000000
MIN_ANGULAR_VELOCITY = 0.010000
They should be set to what your machine can do, these are way to low for anything usable.
Those are values in mm per second.
Can you post your config files here so we can try to figure out what is going on.
Sorry just found them above.
The servo period should be 1000000 ( one million ), the display section for max_velocity should be something more than 1mm per second that is 60mm per minute and
DEFAULT_LINEAR_VELOCITY = 0.250000
MAX_LINEAR_VELOCITY = 1.000000
MIN_LINEAR_VELOCITY = 0.010000
DEFAULT_ANGULAR_VELOCITY = 0.250000
MAX_ANGULAR_VELOCITY = 1.000000
MIN_ANGULAR_VELOCITY = 0.010000
They should be set to what your machine can do, these are way to low for anything usable.
Those are values in mm per second.
Last edit: 10 Feb 2019 12:21 by tommylight.
The following user(s) said Thank You: Stubenrocker3
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5277
10 Feb 2019 14:22 #126148
by PCW
Replied by PCW on topic Need help for school Project with mesa 7i96
Also, what computer hardware do you have?
PCs with Intel Ethernet chips need specific setup tweaks to get decent latency
PCs with Intel Ethernet chips need specific setup tweaks to get decent latency
The following user(s) said Thank You: Stubenrocker3
Please Log in or Create an account to join the conversation.
- Stubenrocker3
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
10 Feb 2019 16:06 #126152
by Stubenrocker3
Replied by Stubenrocker3 on topic Need help for school Project with mesa 7i96
lspci shows:
Do you need a latency test, too?
00:19.0 Ethernet controller: Intel Corporation 82567LM Gigabit Network Connection (rev 03)Do you need a latency test, too?
Please Log in or Create an account to join the conversation.
- Stubenrocker3
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
10 Feb 2019 16:30 #126155
by Stubenrocker3
Replied by Stubenrocker3 on topic Need help for school Project with mesa 7i96
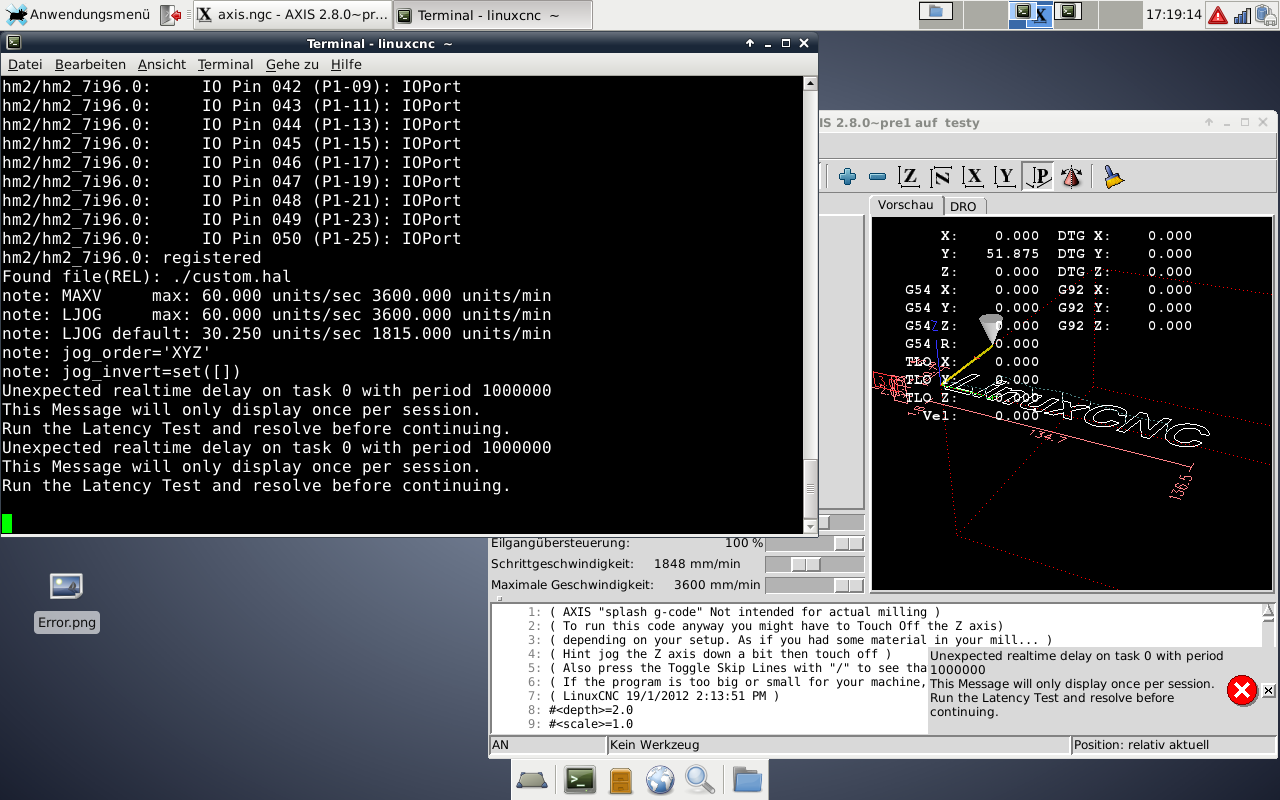
Here is my new conf
and I get a new error. It seems like he didn't like the 1000000 servo period
By the way thanks for your help, you are really saving me.
and I get a new error. It seems like he didn't like the 1000000 servo period
By the way thanks for your help, you are really saving me.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5277
10 Feb 2019 16:33 #126157
by PCW
Replied by PCW on topic Need help for school Project with mesa 7i96
A latency test would help determine your rough system latency,
but one thing that needs to be addressed is your Ethernet settings
The Intel Ethernet driver defaults to waiting in its interrupt service routine
for additional RX packets whenever it receives a Ethernet packet. This helps
thoughput for normal Ethernet use, since it eliminates the interrupt overhead
when multiple packets are received in a burst but its terrible for latency
To fix this you set a driver parameter called rx-usecs to 0. This requires the "ethtool" utility:
sudo ethtool -C eth0 rx-usecs 0
This will only set the parameter temporarily, to set it at system startup, follow the directions in the hm2_eth manual page
Note that your Ethernet port may not be named 'eth0' so change the
name in the command/ scripts to match the name of the ethernet device connected to the 7I96
but one thing that needs to be addressed is your Ethernet settings
The Intel Ethernet driver defaults to waiting in its interrupt service routine
for additional RX packets whenever it receives a Ethernet packet. This helps
thoughput for normal Ethernet use, since it eliminates the interrupt overhead
when multiple packets are received in a burst but its terrible for latency
To fix this you set a driver parameter called rx-usecs to 0. This requires the "ethtool" utility:
sudo ethtool -C eth0 rx-usecs 0
This will only set the parameter temporarily, to set it at system startup, follow the directions in the hm2_eth manual page
Note that your Ethernet port may not be named 'eth0' so change the
name in the command/ scripts to match the name of the ethernet device connected to the 7I96
The following user(s) said Thank You: tommylight, Stubenrocker3
Please Log in or Create an account to join the conversation.
- Stubenrocker3
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
11 Feb 2019 17:56 - 11 Feb 2019 18:13 #126208
by Stubenrocker3
Replied by Stubenrocker3 on topic Need help for school Project with mesa 7i96
Okay I did as I was told. Now linuxcnc doesn't complain about the 1000000 servo period. The problem is my motor still isn't turning 
Could it be that there is something wrong with my cabeling or is there still a major error in my conf? Furthermore do I need to configure the driversettings by flipping the switches? (all 8 are on off right now)
Edit: I messured the Step+ signal. Now I get something like 0.28V when I move the axis.
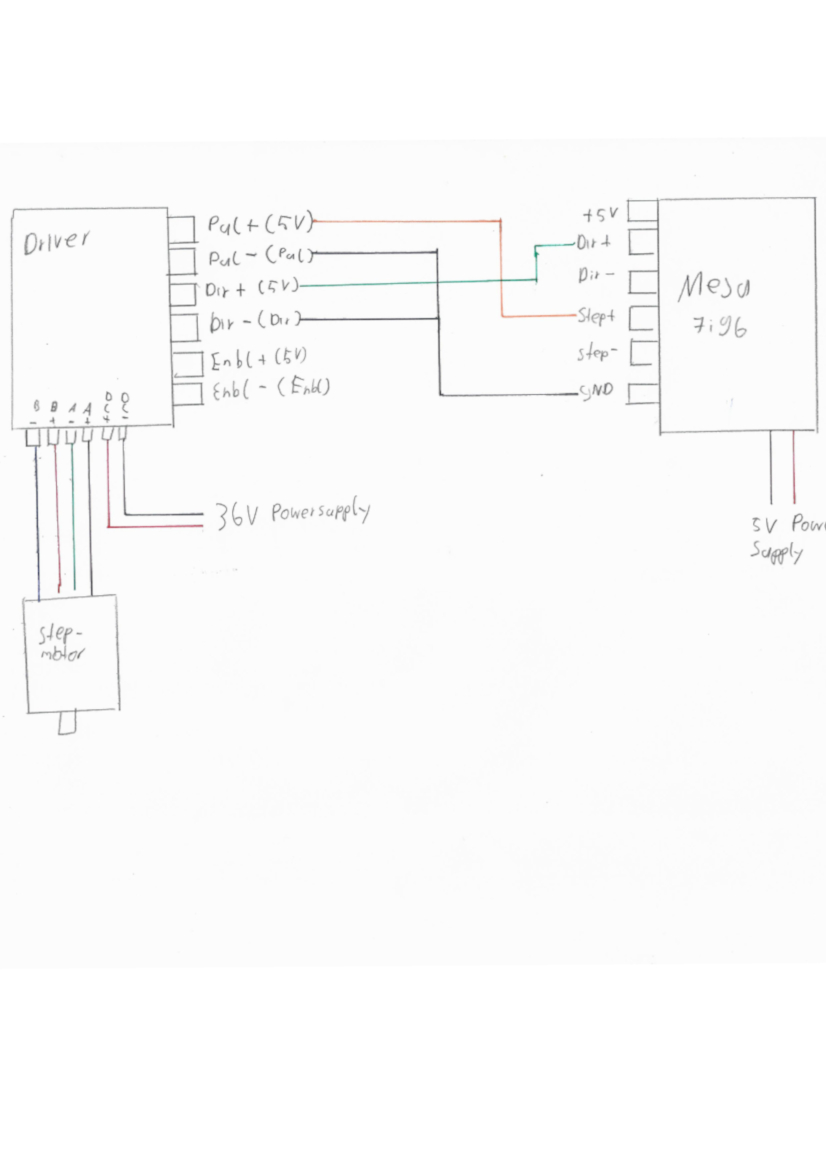
My cableing looks like this:
Could it be that there is something wrong with my cabeling or is there still a major error in my conf? Furthermore do I need to configure the driversettings by flipping the switches? (all 8 are on off right now)
Edit: I messured the Step+ signal. Now I get something like 0.28V when I move the axis.
My cableing looks like this:
Last edit: 11 Feb 2019 18:13 by Stubenrocker3.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5277
11 Feb 2019 18:29 #126209
by PCW
Replied by PCW on topic Need help for school Project with mesa 7i96
Wiring looks OK
Can you post your current hal/ini files?
Can you post your current hal/ini files?
The following user(s) said Thank You: Stubenrocker3
Please Log in or Create an account to join the conversation.
Time to create page: 0.355 seconds