Halscope scaling - Axis Acceleration behaviour
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21702
- Thank you received: 7417
20 May 2020 10:37 #168362
by tommylight
Replied by tommylight on topic Halscope scaling - Axis Acceleration behaviour
Same result using axis mm sim, half the accel on the graph.
I think we are missing the point as the acceleration is a function of 3 variables, and we are looking at only two on the graph.
I think we are missing the point as the acceleration is a function of 3 variables, and we are looking at only two on the graph.
Please Log in or Create an account to join the conversation.
- rodw
-
 Topic Author
Topic Author
- Away
- Platinum Member
-

Less
More
- Posts: 11994
- Thank you received: 4084
20 May 2020 11:11 #168367
by rodw
Replied by rodw on topic Halscope scaling - Axis Acceleration behaviour
Tommy thanks for checking that in a SIM. Saved me a job.
If you look at your formula (iv) V = at we are solving for a (eg. a = V/t) and we have V and t from the plot so to me the maths is sound...
and validated by a couple of online calculators. Just everything must be converted to SI units (eg metres, not mm)
I think its just we don't understand how Linuxcnc works. I suspect this is an easy run with no segments for the look ahead to look at so it idles. I know when I spent hours calibrating my Z with a dial indicator with the torch going up and down to check for missed steps, everything came undone in the real world. I took that to mean LCNC was accelerating harder than when I did the same sort of motion.we are doing here. It would be interesting to try the same with a 45 degree angle so both axes are moving equally. MAybe the other half should come from the Z axis.
If you look at your formula (iv) V = at we are solving for a (eg. a = V/t) and we have V and t from the plot so to me the maths is sound...
and validated by a couple of online calculators. Just everything must be converted to SI units (eg metres, not mm)
I think its just we don't understand how Linuxcnc works. I suspect this is an easy run with no segments for the look ahead to look at so it idles. I know when I spent hours calibrating my Z with a dial indicator with the torch going up and down to check for missed steps, everything came undone in the real world. I took that to mean LCNC was accelerating harder than when I did the same sort of motion.we are doing here. It would be interesting to try the same with a 45 degree angle so both axes are moving equally. MAybe the other half should come from the Z axis.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21702
- Thank you received: 7417
20 May 2020 11:41 #168369
by tommylight
Replied by tommylight on topic Halscope scaling - Axis Acceleration behaviour
That was all from MDI, this is from gcode:
Max_acc set at 508 in sim, velocity max at 30.48, moving all 3 axis at the same time, same distance of 20mm, it goes over 508 set in ini:
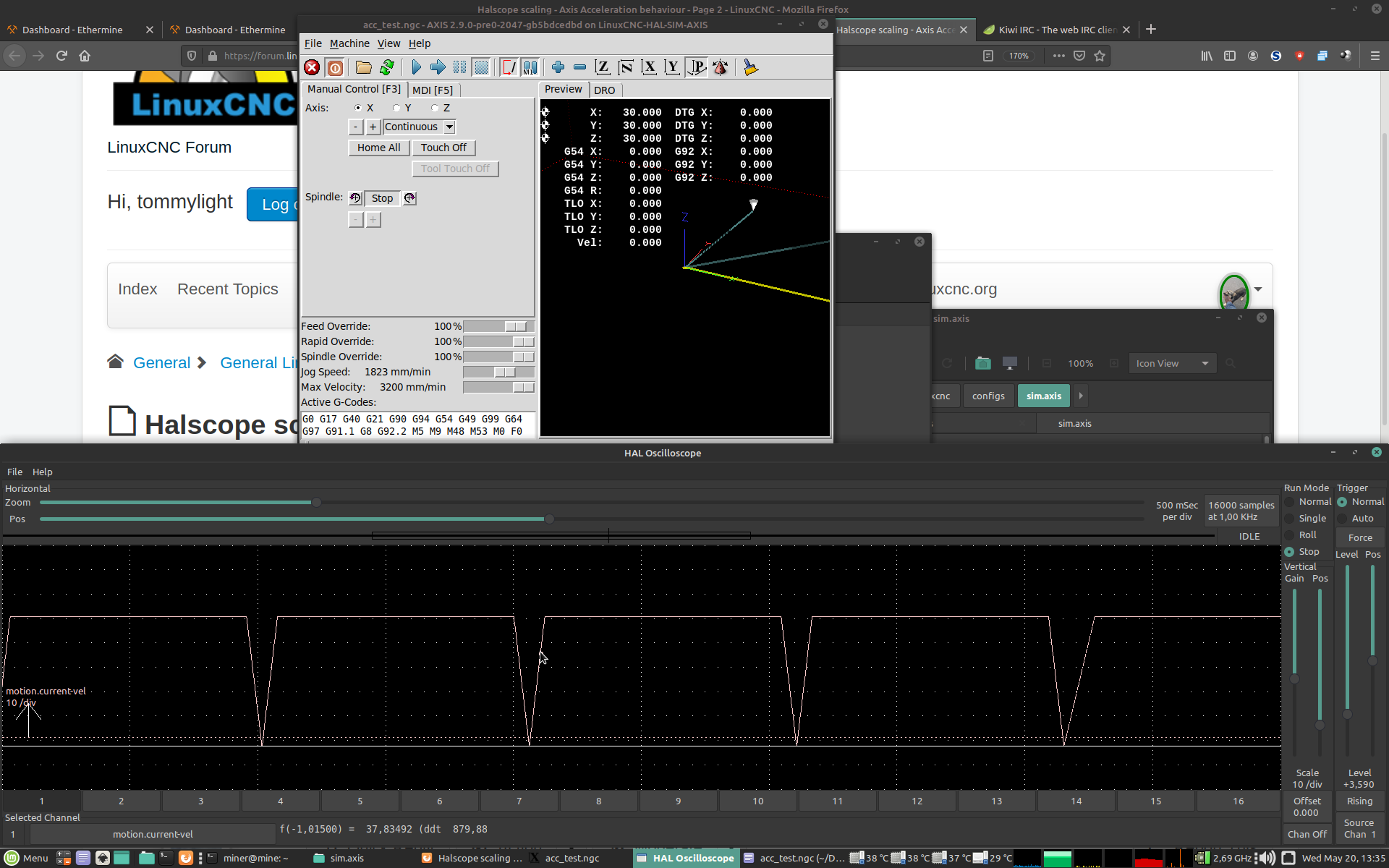
All axis going back to 0 and then only x axis moving 20mm, there is the 508 we are looking for:
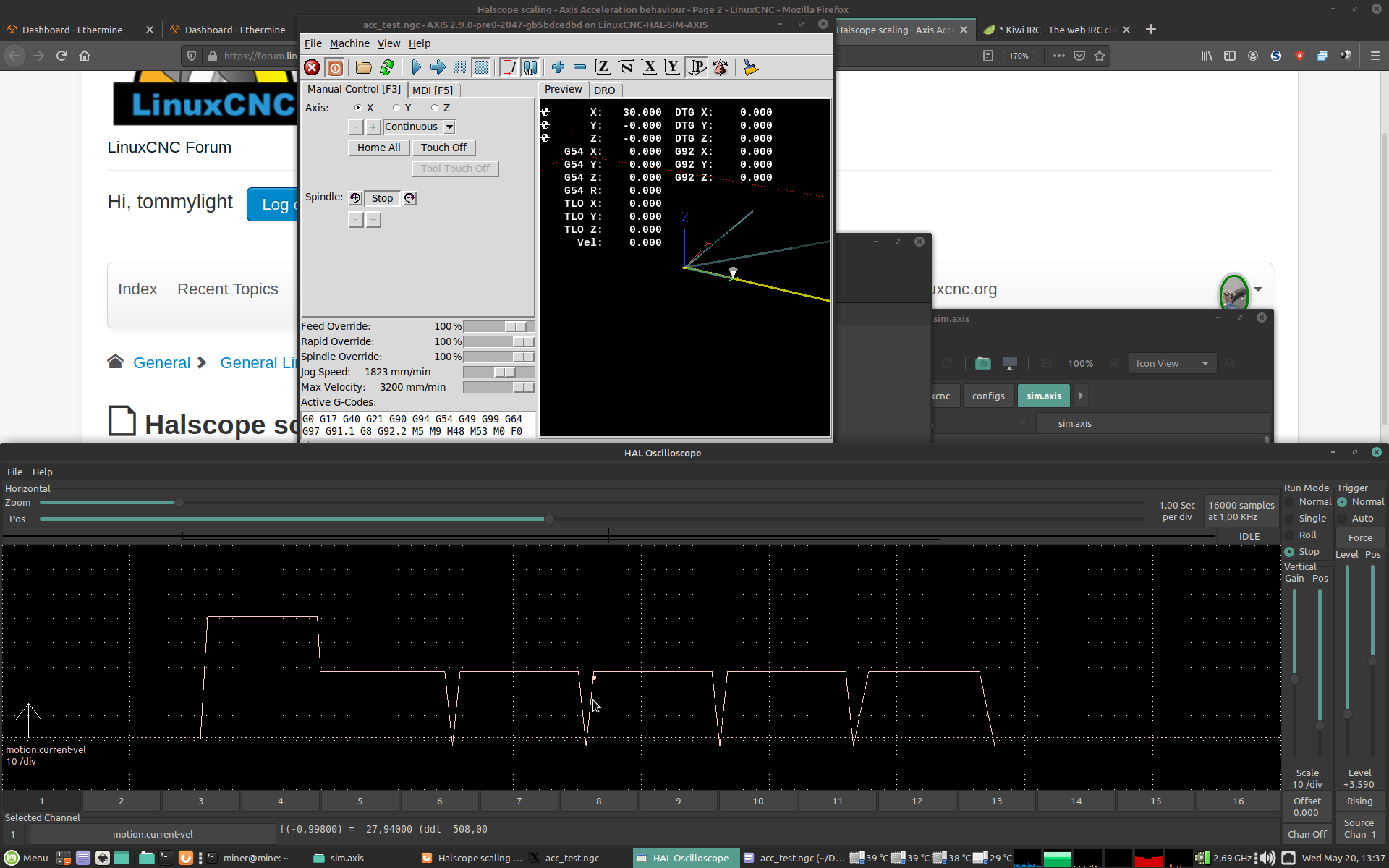
So to recap, in MDI it accelerates at half the set limit, while in gcode it does accelerate at the set value in ini.
Max_acc set at 508 in sim, velocity max at 30.48, moving all 3 axis at the same time, same distance of 20mm, it goes over 508 set in ini:
All axis going back to 0 and then only x axis moving 20mm, there is the 508 we are looking for:
So to recap, in MDI it accelerates at half the set limit, while in gcode it does accelerate at the set value in ini.
Attachments:
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Away
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
20 May 2020 12:18 #168375
by rodw
Replied by rodw on topic Halscope scaling - Axis Acceleration behaviour
Strange, I was using Gcode... And I got 50%
Its hard to work out from the screen dump, how far over the max accel did it go?
Actually when I think about it if X & Y are both moving at Max-vel for their axis, the total accel has to be over the individual max-vels
Its hard to work out from the screen dump, how far over the max accel did it go?
Actually when I think about it if X & Y are both moving at Max-vel for their axis, the total accel has to be over the individual max-vels
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21702
- Thank you received: 7417
20 May 2020 12:48 #168377
by tommylight
Replied by tommylight on topic Halscope scaling - Axis Acceleration behaviour
879.88 while moving all 3 axis.
508 only x
508 is set in ini as the max accel.
508 only x
508 is set in ini as the max accel.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Away
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
20 May 2020 13:20 #168378
by rodw
Replied by rodw on topic Halscope scaling - Axis Acceleration behaviour
That does make sense, if X & Y are both acellerating at 508, the resulting total Accel has to be higher! You could work it out with resolution of forces but my brain hurts. It should be a 45 degree angle so I think its something like 508 * sin(45) +508 * cos(45) but that does not make it to 879
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17965
- Thank you received: 5268
20 May 2020 13:38 - 20 May 2020 13:42 #168380
by PCW
Replied by PCW on topic Halscope scaling - Axis Acceleration behaviour
if all 3 axis accels are 508, and the overall acceleration is not bounded,
say by MAX_LINEAR_ACCELERATION, acceleration in all three axis
can be sqrt(3)*508 =879.88
say by MAX_LINEAR_ACCELERATION, acceleration in all three axis
can be sqrt(3)*508 =879.88
Last edit: 20 May 2020 13:42 by PCW. Reason: clarify
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Away
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
20 May 2020 13:39 #168381
by rodw
Replied by rodw on topic Halscope scaling - Axis Acceleration behaviour
Oops. I left the Z axis out!
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17965
- Thank you received: 5268
20 May 2020 15:05 #168385
by PCW
Replied by PCW on topic Halscope scaling - Axis Acceleration behaviour
The ini settings are used for GCode, MDI commands do seem to use 1/2 of the acceleration settings
The following user(s) said Thank You: rodw
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Away
- Platinum Member
-
Less
More
- Posts: 11994
- Thank you received: 4084
20 May 2020 20:47 #168408
by rodw
Replied by rodw on topic Halscope scaling - Axis Acceleration behaviour
Yeh I had a thought overnight. I was using relative commands so maybe they are planned the same way as MDI commands.
Also there is Simple trajectory planner used for jogging. I wonder if it used for MDI and relative commands? More testing later today.
Also there is Simple trajectory planner used for jogging. I wonder if it used for MDI and relative commands? More testing later today.
Please Log in or Create an account to join the conversation.
Time to create page: 0.282 seconds