Using a Servo for a Mill spindle 7i76e
- Clive S
- Offline
- Platinum Member
-

Less
More
- Posts: 2204
- Thank you received: 486
07 Jul 2020 14:20 - 07 Jul 2020 14:23 #173839
by Clive S
Using a Servo for a Mill spindle 7i76e was created by Clive S
This is on my test bench. 1.8Kw servo in position mode I think connected with step/dir on a 7i76e
I believe the encoder is 2500 p/r
It seems to be running OK ie. commanded speed 1000 and the spindle dro is the same and checked with a rev counter.
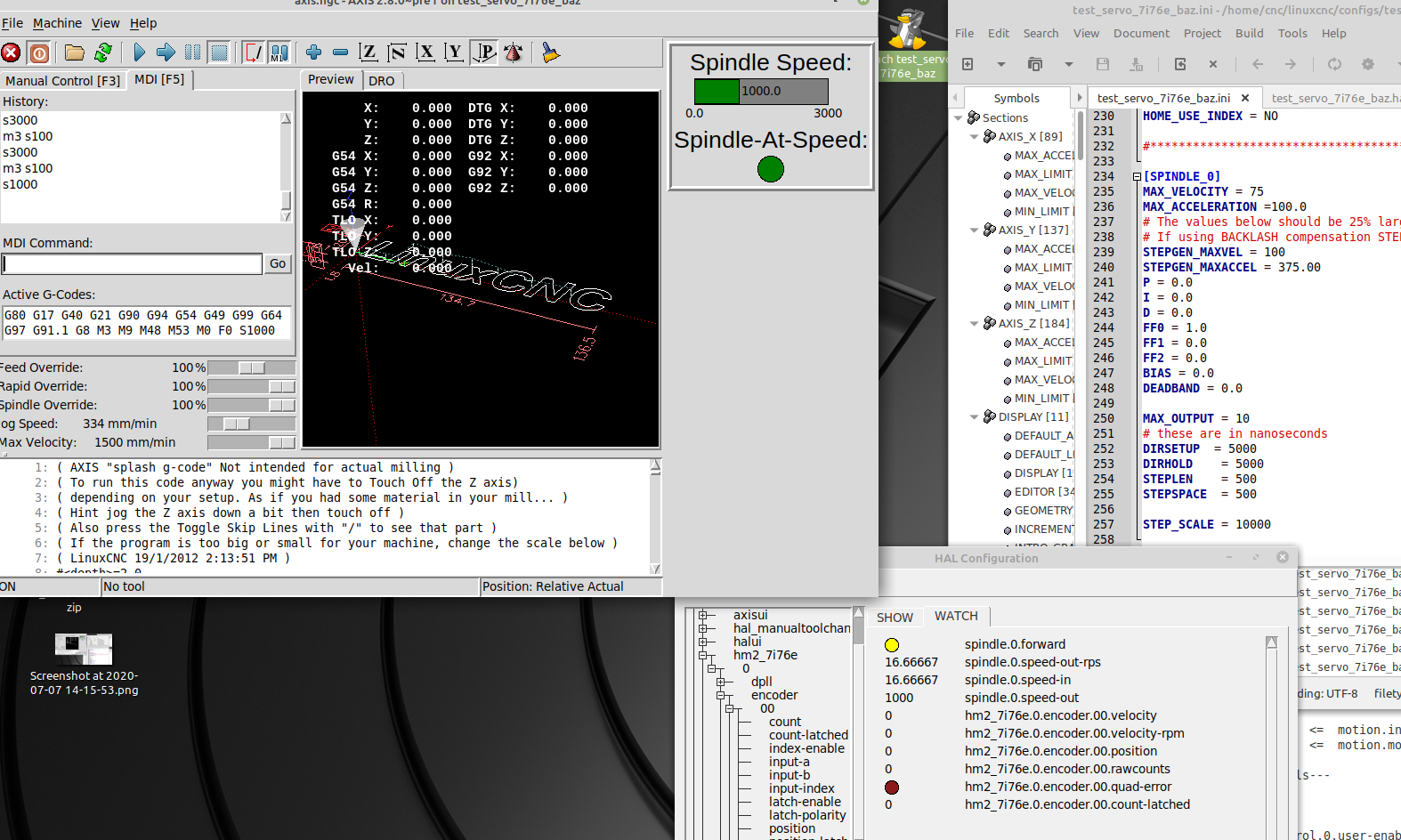
But don't see the encoder working. Also the spindle at speed is not working (probably due to the encoder not giving feedback)
I need the encoder feedback for rigid tapping
Does the ini file look correct for the spindle?
Edit: I am wanting to do this on a 7i96 eventually but I don't have that board in stock
I believe the encoder is 2500 p/r
It seems to be running OK ie. commanded speed 1000 and the spindle dro is the same and checked with a rev counter.
But don't see the encoder working. Also the spindle at speed is not working (probably due to the encoder not giving feedback)
I need the encoder feedback for rigid tapping
Does the ini file look correct for the spindle?
Edit: I am wanting to do this on a 7i96 eventually but I don't have that board in stock
Last edit: 07 Jul 2020 14:23 by Clive S.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21734
- Thank you received: 7425
07 Jul 2020 14:34 #173842
by tommylight
Replied by tommylight on topic Using a Servo for a Mill spindle 7i76e
There is nothing related to spindle encoder in the hal file.
Open pncconf and choose to modify an existing config, add the encoder as spindle encoder, and do not set a spindle at speed input, that should be generated by the encoder velocity.
Open pncconf and choose to modify an existing config, add the encoder as spindle encoder, and do not set a spindle at speed input, that should be generated by the encoder velocity.
The following user(s) said Thank You: Clive S
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
07 Jul 2020 15:27 #173855
by Clive S
Ok spindle is commanded 1000 and it is doing 1000 the spindle dro is zero
Replied by Clive S on topic Using a Servo for a Mill spindle 7i76e
There is nothing related to spindle encoder in the hal file.
Open pncconf and choose to modify an existing config, add the encoder as spindle encoder, and do not set a spindle at speed input, that should be generated by the encoder velocity.
Ok spindle is commanded 1000 and it is doing 1000 the spindle dro is zero
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
07 Jul 2020 22:09 #173930
by Clive S
Replied by Clive S on topic Using a Servo for a Mill spindle 7i76e
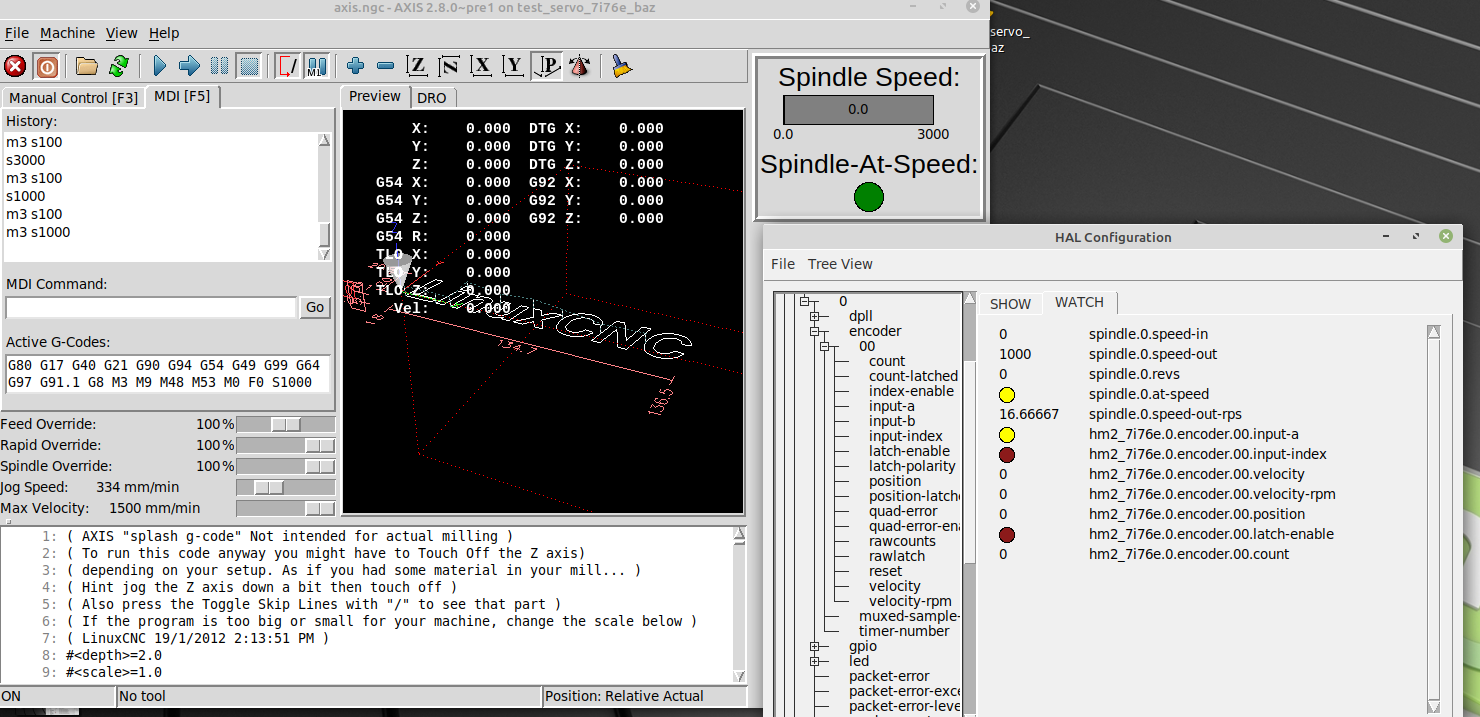
I still don't see any encoder life from the show hal config. Any clue to what am I missing?
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5277
07 Jul 2020 22:14 #173931
by PCW
Replied by PCW on topic Using a Servo for a Mill spindle 7i76e
Hardware?
Is the 7I76E's encoder input jumpered to match the encoder signal type?
( single ended or differential )
Are there valid signal levels at the A and B encoder inputs?
Is the 7I76E's encoder input jumpered to match the encoder signal type?
( single ended or differential )
Are there valid signal levels at the A and B encoder inputs?
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
07 Jul 2020 22:25 #173932
by Clive S
Yes the 3 jumpers are in the right hand position for dff.
I will check in the morning re the signal levels.
Replied by Clive S on topic Using a Servo for a Mill spindle 7i76e
Hardware?
Is the 7I76E's encoder input jumpered to match the encoder signal type?
( single ended or differential )
Are there valid signal levels at the A and B encoder inputs?
Yes the 3 jumpers are in the right hand position for dff.
I will check in the morning re the signal levels.
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
08 Jul 2020 08:18 #173956
by Clive S
Jumpers in RH for diff. Step/Dir on TB-2 20,21,22,23 No field power supplied only 5V on P3 .Nothing else connected to 7i76e
Between TB-3
With Servo speed 100rpm
7-8 17 mV
10-11 17 mV
13-14 3V
With Servo speed zero
7-8 3V
10-11 3V
13-14 3V
Replied by Clive S on topic Using a Servo for a Mill spindle 7i76e
Hardware?
Is the 7I76E's encoder input jumpered to match the encoder signal type?
( single ended or differential )
Are there valid signal levels at the A and B encoder inputs?
Yes the 3 jumpers are in the right hand position for dff.
I will check in the morning re the signal levels.
Jumpers in RH for diff. Step/Dir on TB-2 20,21,22,23 No field power supplied only 5V on P3 .Nothing else connected to 7i76e
Between TB-3
With Servo speed 100rpm
7-8 17 mV
10-11 17 mV
13-14 3V
With Servo speed zero
7-8 3V
10-11 3V
13-14 3V
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21734
- Thank you received: 7425
08 Jul 2020 10:25 #173964
by tommylight
Replied by tommylight on topic Using a Servo for a Mill spindle 7i76e
Check the encoder-a and encoder-b inputs, turn the spindle by hand slowly and see if the LED's are both going on and off.
The commanded velocity is working properly, but there is no feedback at all as can be seen by encoder.0.velocity that stays at 0, it should also show 1000 if the scaling is correct.
The commanded velocity is working properly, but there is no feedback at all as can be seen by encoder.0.velocity that stays at 0, it should also show 1000 if the scaling is correct.
Please Log in or Create an account to join the conversation.
- Clive S
- Offline
- Platinum Member
-
Less
More
- Posts: 2204
- Thank you received: 486
08 Jul 2020 16:46 - 08 Jul 2020 16:56 #173994
by Clive S
The encoder A and B don't change
Jumpers in RH for diff. Step/Dir on TB-2 20,21,22,23 No field power supplied only 5V on P3 .Nothing else connected to 7i76e
Between TB-3
With Servo speed 100rpm
7-8 17 mV
10-11 17 mV
13-14 3V
With Servo speed zero
7-8 3V
10-11 3V
13-14 3V
Edit : with the encoder disconnected from the mesa card ie measuring the encoder outputs I get about the same results as above.
So I wonder if the servo encoder output is not setup properly?
Replied by Clive S on topic Using a Servo for a Mill spindle 7i76e
Check the encoder-a and encoder-b inputs, turn the spindle by hand slowly and see if the LED's are both going on and off.
The commanded velocity is working properly, but there is no feedback at all as can be seen by encoder.0.velocity that stays at 0, it should also show 1000 if the scaling is correct.
The encoder A and B don't change
Jumpers in RH for diff. Step/Dir on TB-2 20,21,22,23 No field power supplied only 5V on P3 .Nothing else connected to 7i76e
Between TB-3
With Servo speed 100rpm
7-8 17 mV
10-11 17 mV
13-14 3V
With Servo speed zero
7-8 3V
10-11 3V
13-14 3V
Edit : with the encoder disconnected from the mesa card ie measuring the encoder outputs I get about the same results as above.
So I wonder if the servo encoder output is not setup properly?
Last edit: 08 Jul 2020 16:56 by Clive S.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5277
08 Jul 2020 17:13 #173996
by PCW
Replied by PCW on topic Using a Servo for a Mill spindle 7i76e
You should measure ~+3 or ~-3 across the A,B differential pairs
(and never close to 0) if you wiggle the shaft around to see all
quadrature states
(and never close to 0) if you wiggle the shaft around to see all
quadrature states
Please Log in or Create an account to join the conversation.
Time to create page: 0.167 seconds