How to find the right Step Time/Step Space?
- Twizzlermill
- Offline
- Senior Member
-

- Posts: 40
- Thank you received: 5
I'm afraid this will be just (another) one of many questions I have.
I've got steppers with integrated drivers (JMC) which are not on the list for stepper drive timing(This one: wiki.linuxcnc.org/cgi-bin/wiki.pl?Stepper_Drive_Timing ). What I found what I think might be related (but what I admittedly don't really understand well) is this:
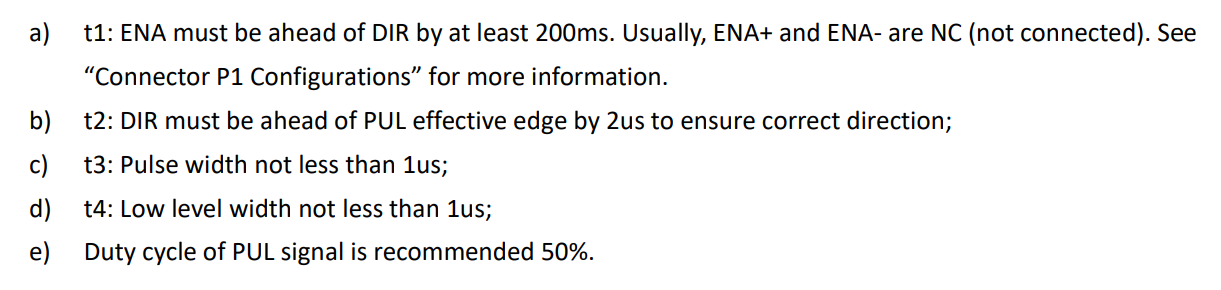
Remark:
b. t2: DIR must be ahead of PUL active edge by 6μs to ensure correct
direction;
c. t3: Pulse width not less than 2.5μs;
d. t4: Low level width not less than 2.5μs.
"PUL" and "Pulse" mean Step/STP here.
The Intro to the Stepper Drive Time list says this:
If your unsure about your drive timing start high like 10000 for each and test.
Fair enough, but honestly, I have no idea what Step Time and Step Space even mean exactly, or, more practical, how they influence my machine's behavior and what to look for.
Same goes for the other two parameters, Direction hold and setup. I have a vague idea what it's about but maybe it's just too abstract for me.
The list also mentions Falling and Rising Edge. I understand on a basic level what it is, but I don't understand the ramifications of choosing one or the other. I can change rising/falling edge on my driver via DIP switch.
I must say, while it was a glorious feeling to see the router move on its own for the first time today, I also realized how much I still need to figure out (like a whole other topic is getting my two y-axis motors to move… But that's for another day I guess)
TIA
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

- Posts: 17968
- Thank you received: 5270
This is 10 us, ample margin relative to the
drives 6 us specification.
Initially I would set the step time and step space to
5000 (5 us), double the drives 2.5 us minimum limits.
The only reason to reduce these times is if you cannot
reach the desired speed with 5 us/5us timings (100 KHz)
I would leave the drive with rising edge trigger
Please Log in or Create an account to join the conversation.
- Twizzlermill
- Offline
- Senior Member
-
- Posts: 40
- Thank you received: 5

Please Log in or Create an account to join the conversation.
- machinedude
-

- Offline
- Platinum Member
-

- Posts: 715
- Thank you received: 312
after looking i am thinking i should be set at something along the lines 3,000 for a setup and hold times and 1500 for a step time and step space and decrease these if i need more?
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
- Posts: 21709
- Thank you received: 7417
You can lower timings, just do plenty of testing to check for missed steps.
And keep in mind, if stepper motors have high inductance, they will stall at higher speeds, but seems you are not there yet, so you are good.
Please Log in or Create an account to join the conversation.
- machinedude
-
- Offline
- Platinum Member
-
- Posts: 715
- Thank you received: 312
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
- Posts: 21709
- Thank you received: 7417
What microstepping?
Please Log in or Create an account to join the conversation.
- machinedude
-
- Offline
- Platinum Member
-
- Posts: 715
- Thank you received: 312
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
- Posts: 21709
- Thank you received: 7417
Please Log in or Create an account to join the conversation.
- machinedude
-
- Offline
- Platinum Member
-
- Posts: 715
- Thank you received: 312
i think my question is more about how things are very specific to the drives and if you are using and if you use the Mesa board when it comes to the step time and step space settings along with the setup and hold times. it seems like if your step times and step space are set to high you limit the number of pulses the system can count? when i get home i will test some more but i was looking to see what you trade off when you adjust these numbers. every action has a reaction sort of deal. I'm just trying to understand it better. it seems to be a topic of confusion.
Please Log in or Create an account to join the conversation.