motor-0-position error beim Abbremsen aus 4-7,5 m/min
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21683
- Thank you received: 7407
21 Feb 2025 15:11 #322209
by tommylight
Replied by tommylight on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
What does
ip a
in a terminal return?
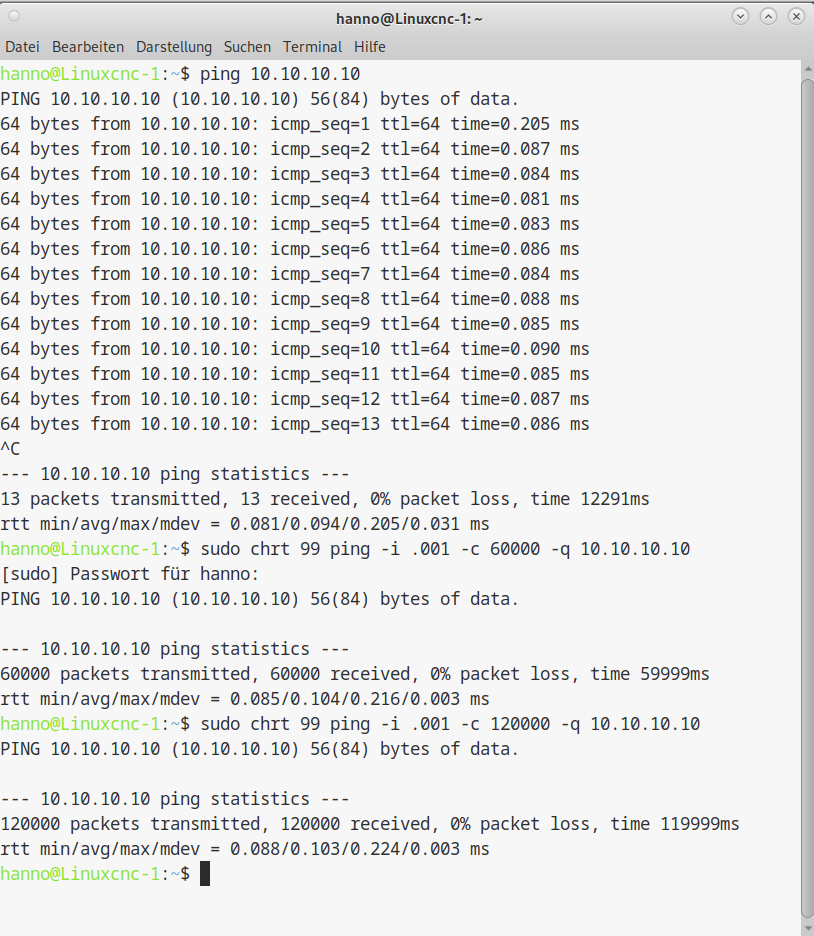
The ping times look way to short (except the 10ms one) so you might be pinging your PC
Then again, i read above that it communicates with the Mesa board, so might be OK, just making sure.
ip a
in a terminal return?
The ping times look way to short (except the 10ms one) so you might be pinging your PC
Then again, i read above that it communicates with the Mesa board, so might be OK, just making sure.
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-

Less
More
- Posts: 102
- Thank you received: 4
21 Feb 2025 19:27 - 21 Feb 2025 19:35 #322220
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Hello PCW, tommylight,
Yes, I have switched to the optional Realtec Network Controller, because with the Intel i got triple as bad pings as with the Realtec when using it for the Mesa Card. (The Intel is very unstable indeed, Internet sometimes connects only with fixed IP, sometimes only with DHCP, that has cost me nerves the last weeks)
hanno@Linuxcnc-1:~$ lspci | grep -i ether
00:19.0 Ethernet controller: Intel Corporation 82579LM Gigabit Network Connection (Lewisville) (rev 04)
02:00.0 Ethernet controller: Realtek Semiconductor Co., Ltd. RTL8111/8168/8411 PCI Express Gigabit Ethernet Controller (rev 15)
I try to find the DKMS driver, if you say this could help.
(oops, trying to load DKMS, I see "dkms ist schon die neueste Version (3.0.10-8+deb12u1)." But I can install/write the driver with r8168 new. I wait until I have done all the steps for that driver.
tommylight: ip a gives back:
hanno@Linuxcnc-1:~$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host noprefixroute
valid_lft forever preferred_lft forever
2: enp2s0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:0a:cd:00:00:1b brd ff:ff:ff:ff:ff:ff
inet 10.10.10.2/24 brd 10.10.10.255 scope global noprefixroute enp2s0
valid_lft forever preferred_lft forever
3: eno1: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:23:24:55:94:28 brd ff:ff:ff:ff:ff:ff
altname enp0s25
inet 192.168.178.22/24 brd 192.168.178.255 scope global noprefixroute eno1
valid_lft forever preferred_lft forever
What does that mean in relation to my pings?
Thanks for your support!
Hanno
Yes, I have switched to the optional Realtec Network Controller, because with the Intel i got triple as bad pings as with the Realtec when using it for the Mesa Card. (The Intel is very unstable indeed, Internet sometimes connects only with fixed IP, sometimes only with DHCP, that has cost me nerves the last weeks)
hanno@Linuxcnc-1:~$ lspci | grep -i ether
00:19.0 Ethernet controller: Intel Corporation 82579LM Gigabit Network Connection (Lewisville) (rev 04)
02:00.0 Ethernet controller: Realtek Semiconductor Co., Ltd. RTL8111/8168/8411 PCI Express Gigabit Ethernet Controller (rev 15)
I try to find the DKMS driver, if you say this could help.
(oops, trying to load DKMS, I see "dkms ist schon die neueste Version (3.0.10-8+deb12u1)." But I can install/write the driver with r8168 new. I wait until I have done all the steps for that driver.
tommylight: ip a gives back:
hanno@Linuxcnc-1:~$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host noprefixroute
valid_lft forever preferred_lft forever
2: enp2s0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:0a:cd:00:00:1b brd ff:ff:ff:ff:ff:ff
inet 10.10.10.2/24 brd 10.10.10.255 scope global noprefixroute enp2s0
valid_lft forever preferred_lft forever
3: eno1: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:23:24:55:94:28 brd ff:ff:ff:ff:ff:ff
altname enp0s25
inet 192.168.178.22/24 brd 192.168.178.255 scope global noprefixroute eno1
valid_lft forever preferred_lft forever
What does that mean in relation to my pings?
Thanks for your support!
Hanno
Last edit: 21 Feb 2025 19:35 by Muftijaja.
Please Log in or Create an account to join the conversation.
- PCW
-

- Online
- Moderator
-
Less
More
- Posts: 17942
- Thank you received: 5255
21 Feb 2025 20:23 - 21 Feb 2025 20:25 #322225
by PCW
Replied by PCW on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
If you have both Intel and Realtek MACs available, I would choose the Intel device for realtime.
(especially if there are issues installing the DKMS Realtek driver)
(especially if there are issues installing the DKMS Realtek driver)
Last edit: 21 Feb 2025 20:25 by PCW.
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
21 Feb 2025 21:02 - 21 Feb 2025 21:02 #322228
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
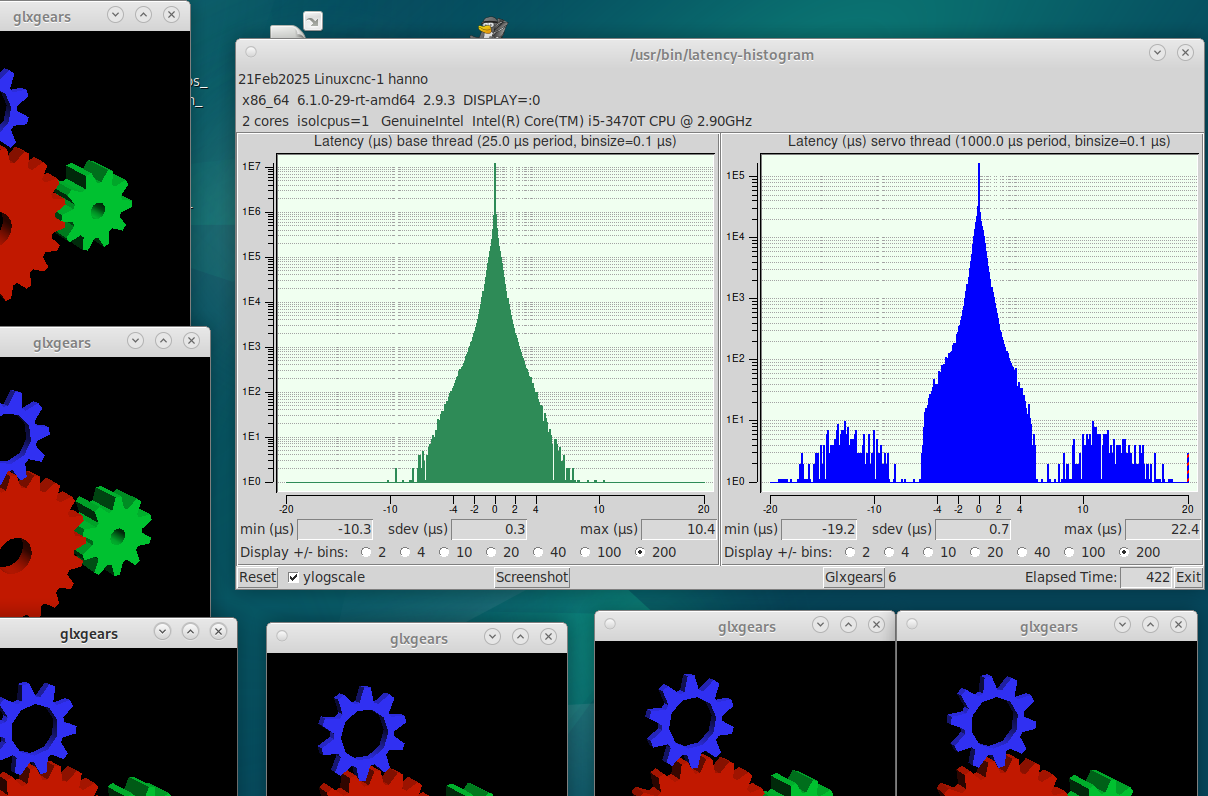
Well, I have installed the DKMS driver r8168 and repeated the ping test and histogram. Ping is a little slower but base thread in the histogram is way better than before!
Here is my ip a and test of r8168:
hanno@Linuxcnc-1:~$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host noprefixroute
valid_lft forever preferred_lft forever
2: enp2s0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:0a:cd:00:00:1b brd ff:ff:ff:ff:ff:ff
inet 10.10.10.2/24 brd 10.10.10.255 scope global noprefixroute enp2s0
valid_lft forever preferred_lft forever
3: eno1: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:23:24:55:94:28 brd ff:ff:ff:ff:ff:ff
altname enp0s25
inet 192.168.178.22/24 brd 192.168.178.255 scope global noprefixroute eno1
valid_lft forever preferred_lft forever
hanno@Linuxcnc-1:~$ lsmod | grep r8168
r8168 581632 0
What do you think about it?
Kind regards and thank you for your support!
Hanno
Here my photos:
Here is my ip a and test of r8168:
hanno@Linuxcnc-1:~$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host noprefixroute
valid_lft forever preferred_lft forever
2: enp2s0: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:0a:cd:00:00:1b brd ff:ff:ff:ff:ff:ff
inet 10.10.10.2/24 brd 10.10.10.255 scope global noprefixroute enp2s0
valid_lft forever preferred_lft forever
3: eno1: <BROADCAST,MULTICAST,UP,LOWER_UP> mtu 1500 qdisc fq_codel state UP group default qlen 1000
link/ether 00:23:24:55:94:28 brd ff:ff:ff:ff:ff:ff
altname enp0s25
inet 192.168.178.22/24 brd 192.168.178.255 scope global noprefixroute eno1
valid_lft forever preferred_lft forever
hanno@Linuxcnc-1:~$ lsmod | grep r8168
r8168 581632 0
What do you think about it?
Kind regards and thank you for your support!
Hanno
Here my photos:
Attachments:
Last edit: 21 Feb 2025 21:02 by Muftijaja.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21683
- Thank you received: 7407
21 Feb 2025 21:09 #322231
by tommylight
Replied by tommylight on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Intel might need coalescing set to 0, PCW knows how, i never needed it despite using all kinds of PC's, but there are plenty of members here who needed it and it works properly.
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
21 Feb 2025 21:21 #322232
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
BTW - I tried a lot to get the Intel going, but it was very frustrating and not successful, months ago, you gave me a lot of tips.
forum.linuxcnc.org/42-deutsch/53358-late...hlermeldung?start=30
forum.linuxcnc.org/42-deutsch/53358-late...hlermeldung?start=30
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
21 Feb 2025 21:29 - 25 Feb 2025 13:32 #322234
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
tommylight, thank you for this tip! Yes indeed, I had the line sudo ethtool -C eno1 rx-usecs 0 on my Desktop to put it in the terminal each time after the PC starts. That helped a lot for the ping as I used the Intel NIC. So I gave Chatgpt the job to make a one-click file out of it, successfully. I can post it here asap, if I go down to my Linuxcnc PC tomorrow (Germany time)THe Realtec NIC is configured by start with coalescence=0, afaik.
PS: Below the file with double click function. delete the .txt and make it executable as a program. (ethool was the name Chatgpt gave it
 )
)
PS: Below the file with double click function. delete the .txt and make it executable as a program. (ethool was the name Chatgpt gave it
Attachments:
Last edit: 25 Feb 2025 13:32 by Muftijaja.
Please Log in or Create an account to join the conversation.
- PCW
-
- Online
- Moderator
-
Less
More
- Posts: 17942
- Thank you received: 5255
21 Feb 2025 22:20 #322238
by PCW
Replied by PCW on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Looks fixed to me.
Wish the LinuxCNC X86 image had the RealTek DKMS driver pre-installed
as the stock driver is NG
Wish the LinuxCNC X86 image had the RealTek DKMS driver pre-installed
as the stock driver is NG
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
- Muftijaja
- Offline
- Premium Member
-
Less
More
- Posts: 102
- Thank you received: 4
27 Apr 2025 17:35 - 27 Apr 2025 17:37 #327176
by Muftijaja
Replied by Muftijaja on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
Hey guys, after several delays I got my machine running and I made my first part with it. First part, first problems. The locknut from my driven ball screw came loosened and I got a lot of backlash. I fixed that, then I had problems with my VFD (Hitachi WJ200), and had to send it to the service. Meanwhile, I used a chinese VFD (with filter unit in the line) , that worked fine, but last week I got the known problems with "motor-0-errors. Mostly if the x-axis stopped, turned around, then comes the error. Sometimes it runs several paths, then stopped again. That drives me crazy.
My latency is as good as before, I don't have lost packages, I don't know what to do with it.
Do you have any hints for me to change this problem? I put my actual HAL and INI here.
BTW - I don't understand that kind of error. What makes LCNC to give this error out? There's no connection to the motor's encoders, no feedback nothing what makes sense for me...
Tanks for any help!
Kind regards, Hanno
My latency is as good as before, I don't have lost packages, I don't know what to do with it.
Do you have any hints for me to change this problem? I put my actual HAL and INI here.
BTW - I don't understand that kind of error. What makes LCNC to give this error out? There's no connection to the motor's encoders, no feedback nothing what makes sense for me...
Tanks for any help!
Kind regards, Hanno
Attachments:
Last edit: 27 Apr 2025 17:37 by Muftijaja.
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21683
- Thank you received: 7407
27 Apr 2025 18:36 #327177
by tommylight
Replied by tommylight on topic motor-0-position error beim Abbremsen aus 4-7,5 m/min
You have a servo period of 2000000 (2 million) but failed to set the correct P value for it at 500, not 666.
Max_velocity is 125 but stepgen_max_velocity is 150 despite just above it being clearly stated it must be 25% above max_velocity, so absolute minimum is 156.25, or rounded 160
And, why do you have anything but 0 for FF2 on a stepper system? It should be 0.
All of those contribute to your issues.
Max_velocity is 125 but stepgen_max_velocity is 150 despite just above it being clearly stated it must be 25% above max_velocity, so absolute minimum is 156.25, or rounded 160
And, why do you have anything but 0 for FF2 on a stepper system? It should be 0.
All of those contribute to your issues.
The following user(s) said Thank You: Muftijaja
Please Log in or Create an account to join the conversation.
Moderators: Muecke
Time to create page: 0.200 seconds