- Configuring LinuxCNC
- HAL
- HAL Examples
- hal file for gamepad pendant with retrofitted 12-position selector switch
hal file for gamepad pendant with retrofitted 12-position selector switch
- juergen-home
- Offline
- Senior Member
-

Less
More
- Posts: 44
- Thank you received: 15
17 Oct 2025 16:05 #336607
by juergen-home
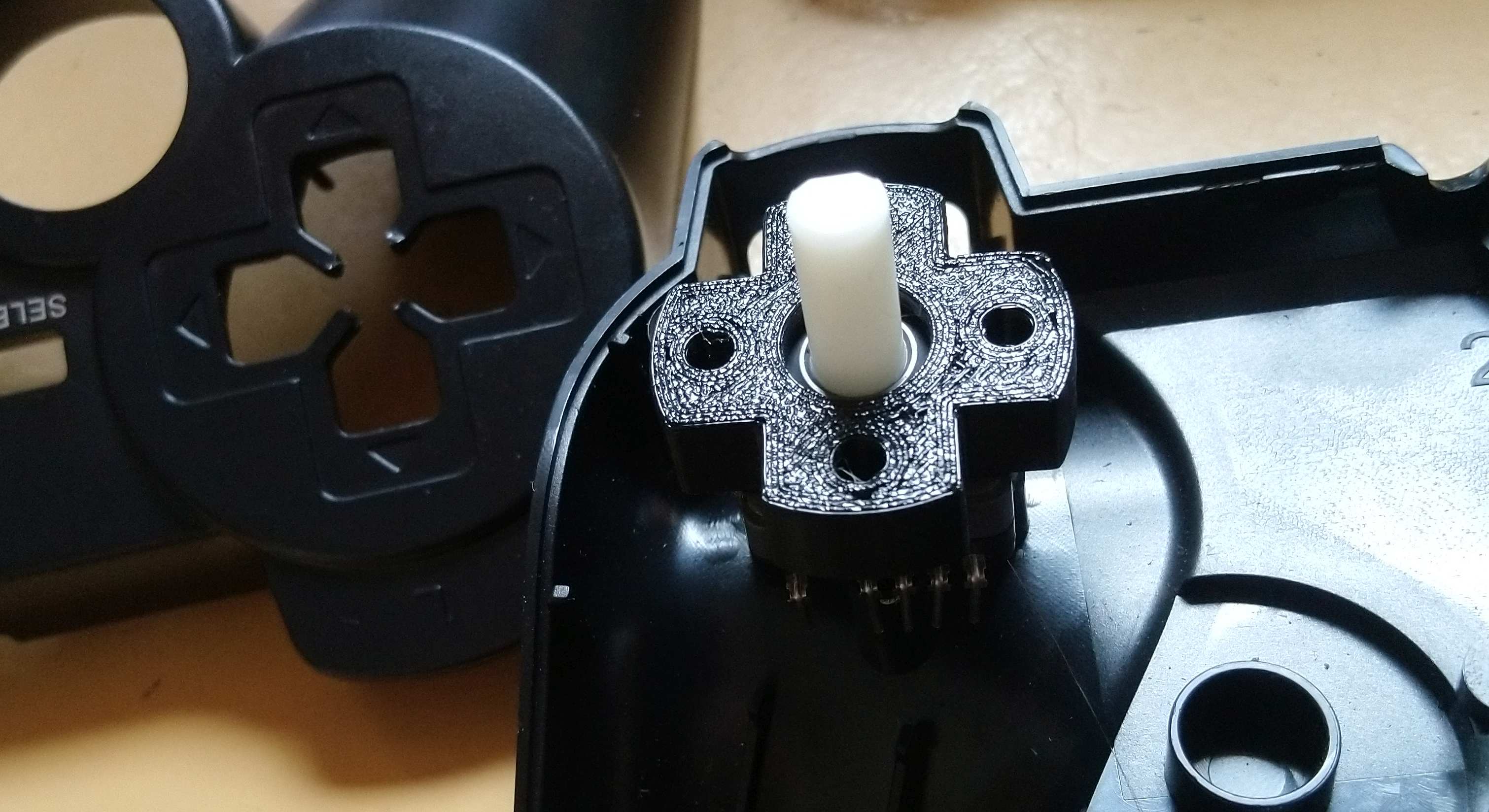
hal file for gamepad pendant with retrofitted 12-position selector switch was created by juergen-home
hal file for gamepad with retrofitted 12-position selector switch
# use special version of toggle2nist: www.forum.linuxcnc.org/24-hal-components...ton-at-the-same-time
# ALPS encoder EC18AGA20402
# Simple gamepad as a pendant
# Jogging (axes): Buttons 1–4, 11–12 control X, Y, Z motion (+/−).
# Feed Controls: Buttons 9, 10 adjust program feed override +1 / -1.
# Feed Controls: Encoder: inputs (6, 8) (17, 19) adjust program feed override in predefined steps
# Program Control: Buttons 13–16 manage stop, pause, start, and mist-coolant.
# Mode Selection: Encoder: inputs (6, 8) (17, 19) set jog/increment steps via `mux16` and `lut5` for maual jog.

# use special version of toggle2nist: www.forum.linuxcnc.org/24-hal-components...ton-at-the-same-time
# ALPS encoder EC18AGA20402
# Simple gamepad as a pendant
# Jogging (axes): Buttons 1–4, 11–12 control X, Y, Z motion (+/−).
# Feed Controls: Buttons 9, 10 adjust program feed override +1 / -1.
# Feed Controls: Encoder: inputs (6, 8) (17, 19) adjust program feed override in predefined steps
# Program Control: Buttons 13–16 manage stop, pause, start, and mist-coolant.
# Mode Selection: Encoder: inputs (6, 8) (17, 19) set jog/increment steps via `mux16` and `lut5` for maual jog.
# ttm_a for linuxcnc 2.9.6 AXIS GUI 2025-10-17 encoder 16
# use special version of toggle2nist: forum.linuxcnc post 05 Oct 2025 18:50 #335873 special toggle2nist.comp with "pulse-length" mode from Aciera
# https://www.forum.linuxcnc.org/24-hal-components/57307-toggle2nist-hangs-when-pressing-an-other-button-at-the-same-time
# https://www.forum.linuxcnc.org/media/kunena/attachments/25994/toggle2nist.comp
# sudo halcompile --install toggle2nist.comp
# +joging while not homed
# +ALPS encoder functionality prepared
# ALPS encoder functionality functional
# override prepered with Max-velocity
# override with Feed Override + Rapid Override
# suppress error messages when pressing 1 2 3 4 11 12 start.. while halui.program.is-running / halui.program.is-paused
# short circuit one unused analog button to detect if analog is on
# Jogging (axes): Buttons 1–4, 11–12 control X, Y, Z motion (+/−).
# Feed Controls: Buttons 9, 10 adjust program feed override +1 / -1.
# Feed Controls: Encoder: inputs (6, 8) (17, 19) adjust program feed override in predefined steps
# Program Control: Buttons 13–16 manage stop, pause, start, and mist-coolant.
# Mode Selection: Encoder: inputs (6, 8) (17, 19) set jog/increment steps via `mux16` and `lut5` for maual jog.
# =================================================================================
# Analog LED on the gamepad has to be switched on, otherwise it is not working as intended.
# Furthermore when analog is not on it will e-stop on switching on. If analog is switched off while
# program is running it will e-stop when program is stoped.
# =================================================================================
# hal file for a simple usb gamepad.
# do not trust this .hal file until you tested it yourself under save conditions.
# this code contain traces of code from smarter people than me.
# For easier integration with my other .hal files components are loaded in "loadrt or2 names=or2_0a" format
#For testing in sim.axis I switch "TWOPASS = on" as follow: (axis_mm.ini)
#[HAL]
#TWOPASS = on
#HALFILE = core_sim.hal
#HALFILE = sim_spindle_encoder.hal
#->#HALFILE = axis_manualtoolchange.hal
#HALFILE = simulated_home.hal
#->#HALFILE = cooling.hal
#HALFILE = gamepad.hal
#POSTGUI_HALFILE = postguihalfile2.hal
# https://linuxcnc.org/docs/html/man/man9/
# https://linuxcnc.org/docs/html/hal/components.html
# ---------------------------------------------------------------
# $ less /proc/bus/input/devices --> usb device name "USB Gamepad"
# To use the next line the proper device must be plugged in or it will fail
# IF your machine have to run without the gamepad comment out the gamepad.hal in the machines ini file.
# generic china
loadusr -W hal_input -KRAL USB Gamepad
#loadusr -W hal_input -KRAL USB Logitech Logitech Dual Action
# RF generic china
#loadusr -W hal_input -KRAL Twin USB Joystick Twin USB Joystick
# NOTE: LinuxCNC 2.9 renames btn-joystick to btn-trigger.
# ---------------------------------------------------------------
# analog LED must be ON: only 2 inputs are usable with buttons.
# position: joystick left hand
# input.0.abs-x-is-neg
# input.0.abs-x-is-pos not usable (poti swich to +)
# input.0.abs-y-is-neg
# input.0.abs-y-is-pos not usable (poti swich to +)
# analog LED must be ON: only 2 inputs are usable with buttons.
#
# position: joystick right hand
# input.0.abs-rz-is-neg
# input.0.abs-rz-is-pos not usable (poti swich to +)
# input.0.abs-z-is-neg
# input.0.abs-z-is-pos not usable (poti swich to +)
# analog LED must be ON: max 2 input buttons in one corner on at the same time are working.
# 2 input buttons in opposite (r+l) will not work, more than 2 input buttons at the same time will not work.
# position: 4 cross buttons left hand
#input.0.abs-hat0x-is-pos
#input.0.abs-hat0x-is-neg
#input.0.abs-hat0y-is-pos
#input.0.abs-hat0y-is-neg
# Gamepad USB:
# 01 input.0.btn-trigger 1 y+ direction
# 02 input.0.btn-thumb 2 x+ direction
# 03 input.0.btn-thumb2 3 y- direction
# 04 input.0.btn-top 4 x- direction
# 05 input.0.abs-hat0y-is-pos left-cross top not usable (only 2 out of 4 at the same time)
# 06 input.0.abs-hat0x-is-pos left-cross right incr1 mux16/lut5
# 07 input.0.abs-hat0x-is-neg left-cross left not usable (only 2 out of 4 at the same time)
# 08 input.0.abs-hat0y-is-neg left-cross bottom incr3 mux16/lut5
# 09 input.0.btn-base left2 feed 1% -
# 10 input.0.btn-top2 left1 feed 1% +
# 11 input.0.btn-base2 right2 z- direction
# 12 input.0.btn-pinkie right1 z+ direction
# 13 input.0.btn-base5 button left (3d-print) E-Stop
# 14 input.0.btn-base6 button right (3d-print) pause
# 15 input.0.btn-base3 select toggle coolant-mist
# 16 input.0.btn-base4 start start/home all
# 17 input.0.abs-x-is-neg joystick left hand incr0 mux16/lut5
# 18 input.0.abs-x-is-pos joystick left hand not usable (poti swich to +)
# 19 input.0.abs-y-is-neg joystick left hand incr2 mux16/lut5
# 20 input.0.abs-y-is-pos joystick left hand not usable (poti swich to +)
# 21 input.0.abs-rz-is-neg joystick right hand analog-on
# 22 input.0.abs-rz-is-pos joystick right hand not usable (poti swich to +)
# 23 input.0.abs-z-is-neg joystick right hand free
# 24 input.0.abs-z-is-pos joystick right hand not usable (poti swich to +)
#┌────────────────────────────────────────────────┐
#│ ┌─────┐ front ┌─────┐ │
#│ │ 9 │ <--bottom--> │ 11 │ │
#│ └─────┘ └─────┘ │
#│ ┌─────┐ front ┌─────┐ │
#│ │ 10 │ <--top--> │ 12 │ │
#│ └─────┘ select start └─────┘ │
#│ 5 15 16 1 │
#│ │
#│ 8 6 17 21 4 2 │
#│ ┌────┐ ┌────┐ │
#│ 7 20│ 13 │18 24│ 14 │22 3 │
#│ └────┘ └────┘ │
#│ 19 23 │
#└────────────────────────────────────────────────┘
# example how to change increment
# set jog increment to 1
#setp halui.axis.x.increment 0.1
# example how to change jog-speed
# set jog speed to 100 jog-speed
#setp halui.axis.jog-speed 100
#Buttons to net (if we want to use a button for more than 1 function)
net net-input-base6 input.0.btn-base6
net net-input-0-btn-base input.0.btn-base
#---------------------
# Software-based estop (13)
#---------------------
#net net-estop input.0.btn-base5 => halui.estop.activate # button estop
#---------------------
#---------------------
# Program Stop (13)
net net-stop1 input.0.btn-base5 => halui.program.stop
#---------------------
#---------------------
# when analog mode is not on
#---------------------
# for detecting this, there is a bridge soldered in for input.0.abs-rz-is-neg
# while input.0.abs-rz-is-neg is the same as input.0.btn-top (x- direction) if analog mode is off the x-axis is running x-direction all the time
# so we have to prevent this state with immediately e-stop when no program is running or e-stop when a running program stops.
# let the program run for the case analog is switched off by accidentely so the work is not lost.
# by this you can not even switch on the machine when analog is off.
# if you have a better solution let me know.
#---------------------
loadrt and2 names=and2_analog,and2_analog_p_run,and2_analog_p_run_not
addf and2_analog servo-thread
addf and2_analog_p_run servo-thread
addf and2_analog_p_run_not servo-thread
loadrt not names=not_analog
addf not_analog servo-thread
loadrt message names=analog,analog_alert messages="gamepad: switch on analog,gamepad: switch on analog or machine will e-stop if program is stopped"
addf analog servo-thread
addf analog_alert servo-thread
setp analog.edge 1
setp analog_alert.edge 1
loadrt edge names=edge_clear_msg
addf edge_clear_msg servo-thread
setp edge_clear_msg.both 0
setp edge_clear_msg.in-edge 0
setp edge_clear_msg.out-width-ns 100000000
net net-analog-in input.0.abs-rz-is-neg => not_analog.in # signal from gamepdad
net net-analog-on-not <= not_analog.out # inverse signal from gamepdad
net net-analog-in edge_clear_msg.in # impulse for clear messages when analog is switched on
net net-edge-clear-msg edge_clear_msg.out # impulse for clear messages when analog is switched on
# if analog is not on and machine is switched on message is triggered
net net-analog-on-not and2_analog.in0
net net-analog-on-not1 and2_analog.in1 <= halui.machine.is-on
net net-analog and2_analog.out => analog.trigger #message to GUI Axis
# if analog is not on and no prog. is running do e-stop
net net-programm-is-on-not and2_analog_p_run_not.in0
net net-analog and2_analog_p_run_not.in1
net met-analog-p-run-not-out and2_analog_p_run_not.out halui.estop.activate # e-stop if analog not active
# if analog is not on and prog. is running message2 is triggered
net net-programm-is-on and2_analog_p_run.in0
net net-analog-on-not and2_analog_p_run.in1
net net-analog-p-run-out and2_analog_p_run.out => analog_alert.trigger #message to GUI Axis
# this is for clearing messages. clearing code is in the postguihalfile2.hal
loadrt or2 names=or2-clear-messages # for postguihalfile2.hal clear message
addf or2-clear-messages servo-thread # for postguihalfile2.hal clear message
#---------------------
#---------------------
# Program Start (start when homed / home when not homed) / clear all messages in axix gui
#---------------------
loadrt and2 names=and_home
addf and_home servo-thread
loadrt not names=not_homed
addf not_homed servo-thread
# if not homed: home all axis when pressing the start button
net net-homed not_homed.in <= halui.joint.0.is-homed # homed
net net-not-homed not_homed.out and_home.in0 # when not homed
net net-start.button-pressed and_home.in1 # and start pressed
net net-home-all-now and_home.out halui.home-all # home all axis
# start program (when at least x-axis is homed, only x-axis is checked but start will fail if not all axis are homed)
loadrt and2 names=and_is_homed
addf and_is_homed servo-thread
loadrt and2 names=and_prog-11 #Load AND components for logical AND operations
addf and_prog-11 servo-thread # for start
net net-homed and_is_homed.in0 # when homed
net net-start.button-pressed input.0.btn-base4 # and start pressed
net net-start.button-pressed and_is_homed.in1 # and start pressed
net net-programm-is-on-not and_prog-11.in0 # dont start when program is already running to prevent error message
net net-programm-is-on-not11 and_prog-11.in1 and_is_homed.out
net net-run-prog and_prog-11.out => halui.program.run # start program
# ->postguihalfile2.hal: axisui.notifications-clear #clear all messages in axix gui
#---------------------
#---------------------
# Program Pause on/off
#---------------------
# known bugs: if you e-stop while pressing pause, than swich on and start program again, occasionally pause will not work.
# sometimes tog2nist_1.on stays on! --> only with original toggle2nist.comp
#loadrt toggle names=tog_1 # Load N components for logical NOT operations
#addf tog_1 servo-thread
loadrt toggle2nist names=tog2nist_1 # Load N components for logical NOT operations
addf tog2nist_1 servo-thread
# these 2 setp have to be commented out for regular toggle2nist.comp in 2.9.6
# setp tog2nist_1.debounce 2
setp tog2nist_1.pulse-length 50 # to prevent hanging tog2nist / forum.linuxcnc post 05 Oct 2025 18:50 #335873 special toggle2nist.comp from Aciera
# this toggle in front of toggle2nist is needed for regular toggle2nist.comp in 2.9.6
#net net-input-base6 => tog_1.in # this is the pause button
#net net-button-pause tog2nist_1.in <= tog_1.out
net net-input-base6 => tog2nist_1.in
net net-halui-program-is-paused halui.program.is-paused
net net-halui-program-is-paused tog2nist_1.is-on
net net-pause-off tog2nist_1.off => halui.program.resume
net net-pause-on tog2nist_1.on => halui.program.pause
#---------------------
#---------------------
# Coolant Signal
#---------------------
# with this 2 lines each coolant shows a checkbox in the axis ui
# this is normaly part of the machine.hal / here only for test in the SIM-HAL-AXIS
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
#---------------------
#----------------------------------------------------------------------------------------------------------
# Activate coolant / mist
#----------------------------------------------------------------------------------------------------------
# A single joypad button will start and stop the coolant.
# coolant on-off with toggle2nist
loadrt toggle names=tog_0 # Load N components for logical NOT operations
addf tog_0 servo-thread
loadrt toggle2nist names=tog2nist_0 # Load N components for logical NOT operations
addf tog2nist_0 servo-thread
# this toggle in front of toggle2nist is needed for regular toggle2nist.comp in 2.9.6
#net net-joy-mist-toggle tog_0.in <= input.0.btn-base3
#net net-button-start tog2nist_0.in <= tog_0.out
net net-button-start tog2nist_0.in <= input.0.btn-base3 # here is the button
net net-mist.is-on tog2nist_0.is-on <= halui.mist.is-on
net net-mist-off tog2nist_0.off => halui.mist.off
net net-mist-on tog2nist_0.on => halui.mist.on
#----------------------------------------------------------------------------------------------------------
#----------------------------------------------------------------------------------------------------------
# For jog without (before) homing - fixed jog-speed 500
#----------------------------------------------------------------------------------------------------------
# This is not properly working with the simulation. If you jog before homing with x+ or z- homing may fail.
# In my real machine it seems to work
# we have to use the net name "net-x-minus.jog" not the actual button name because we feed the botton to multiple inputs
# Before homing (if allowed) you jog joints. After homing you must jog axes.
setp halui.joint.jog-speed 500
net net-x-minus-jog => halui.joint.0.minus
net net-x-plus-jog => halui.joint.0.plus
net net-y-minus-jog => halui.joint.1.minus
net net-y-plus-jog => halui.joint.1.plus
net net-z-minus-jog => halui.joint.2.minus
net net-z-plus-jog => halui.joint.2.plus
#----------------------------------------------------------------------------------------------------------
# -----
# selection of incremental / jog values with (mux16)
# -----
# we use a 4 bit 12 position encoder here
loadrt mux16 names=mux_encoder # for 16 different incremental steps
addf mux_encoder servo-thread # add to the servo-thread so it can be used
#mux16.N.use-graycode bit in
#This signifies the input will use Gray code instead of binary. Gray code is a good choice when using physical switches because for each increment only one select input changes at a time.
#not used yet
# Define the gamepad inputs for selection of incremental / jog values
#
# alps gamepad net
# 2 input.0.abs-hat0x-is-pos incr1
#
# 4 input.0.abs-hat0y-is-neg incr3
# 5 COM
# 3 input.0.abs-y-is-neg incr2
# 1 input.0.abs-x-is-neg incr0
# buttons for the encoder
net incr0 input.0.abs-x-is-neg
net incr1 input.0.abs-hat0x-is-pos
net incr2 input.0.abs-y-is-neg
net incr3 input.0.abs-hat0y-is-neg
# connect the buttons with the multiplexer
net incr0 mux_encoder.sel0
net incr1 mux_encoder.sel1
net incr2 mux_encoder.sel2
net incr3 mux_encoder.sel3
# -----
# Set the 12 incremental step and jog values for the mux16 component
setp mux_encoder.in00 0 # off 0
setp mux_encoder.in01 0.01 # Increment 1
setp mux_encoder.in03 0.05 # Increment 2
setp mux_encoder.in02 0.1 # Increment 3
setp mux_encoder.in06 1 # Increment 4
setp mux_encoder.in07 10 # Jog 5
setp mux_encoder.in05 50 # Jog 6
setp mux_encoder.in04 100 # Jog 7
setp mux_encoder.in12 200 # Jog 8
setp mux_encoder.in13 500 # Jog 9
setp mux_encoder.in09 1000 # Jog 10
setp mux_encoder.in08 3000 # Jog 11
setp mux_encoder.in11 0 # Jog # not used
setp mux_encoder.in10 0 # Jog # not used
setp mux_encoder.in14 0 # Jog # not used
setp mux_encoder.in15 0 # Jog # not used
#---- if you want to use mux16grey code instead use this example:
# Set the 12 incremental step and jog values for the mux16 component use grey code
#setp mux_encoder.use-graycode 1
#setp mux_encoder.in00 0 # off 0
#setp mux_encoder.in01 0.01 # Increment 1
#setp mux_encoder.in02 0.05 # Increment 2
#setp mux_encoder.in03 0.1 # Increment 3
#setp mux_encoder.in04 1 # Increment 4
#setp mux_encoder.in05 10 # Jog 5
#setp mux_encoder.in06 50 # Jog 6
#setp mux_encoder.in07 100 # Jog 7
#setp mux_encoder.in08 200 # Jog 8
#setp mux_encoder.in09 500 # Jog 9
#setp mux_encoder.in10 0 # Jog # not used
#setp mux_encoder.in11 0 # Jog # not used
#setp mux_encoder.in12 0 # Jog # not used
#setp mux_encoder.in13 0 # Jog # not used
#setp mux_encoder.in14 1000 # Jog 10
#setp mux_encoder.in15 3000 # Jog 11
#----
# 4-Bit-
# Gray-Code
# 4321 16pos Switch position ALPS
# 0000 1 1
# 0001 2 2
# 0011 3 3
# 0010 4 4
# 0110 5 5
# 0111 6 6
# 0101 7 7
# 0100 8 8
# 1100 9 9
# 1101 10 10
# 1111 11
# 1110 12
# 1010 13
# 1011 14
# 1001 15 11
# 1000 16 12
net net-mux-encoder-out mux_encoder.out-f # the actual increment value
net net-mux-encoder-out => halui.axis.x.increment # the actual increment value to the axis
net net-mux-encoder-out => halui.axis.y.increment # the actual increment value to the axis
net net-mux-encoder-out => halui.axis.z.increment # the actual increment value to the axis
# ! The 4 bit 12 position ALPS ecoder uses GREY code
# Position
# (8) (4) (2) (1) GREY code LUT5
# decimal sel3 sel2 sel1 sel0 ALPS SW mux_encoder.out mux.in weight jog/incr
# 0 0 0 0 0 1 0 0 00 0x1
# 1 0 0 0 1 2 0.01 1 01 0x2 increment
# 2 0 0 1 0 4 0.1 3 02 0x4 increment
# 3 0 0 1 1 3 0.05 2 03 0x8 increment
# 4 0 1 0 0 8 200 7 04 0x10 jog
# 5 0 1 0 1 7 100 6 05 0x20 jog
# 6 0 1 1 0 5 1 4 06 0x40 increment
# 7 0 1 1 1 6 10 5 07 0x80 jog
# 8 1 0 0 0 12 50 11 08 0x100 jog
# 9 1 0 0 1 11 3000 10 09 0x200 jog
# 10 1 0 1 0 10
# 11 1 0 1 1 11
# 12 1 1 0 0 9 500 8 12 0x1000 jog
# 13 1 1 0 1 10 1000 9 13 0x2000 jog
# 14 1 1 1 0 14
# 15 1 1 1 1 15
# -----
# selection of when to jog-incremental and when to jog - with lut5 (look up tabel)
# -----
loadrt lut5 names=lut5_incr,lut5_jog # if we incr or jog
addf lut5_incr servo-thread # add to the servo-thread so it can be used
addf lut5_jog servo-thread # add to the servo-thread so it can be used
net incr0 lut5_incr.in-0
net incr1 lut5_incr.in-1
net incr2 lut5_incr.in-2
net incr3 lut5_incr.in-3
#--------------------------------------------------------
# LUT5 function for increment
# HEX DEZ
# dec Bit4 Bit3 Bit2 Bit1 Bit0 Weight Weight
# 1 0 0 0 0 1 0x2 2
# 2 0 0 0 1 0 0x4 4
# 3 0 0 1 0 0 0x8 8
# 6 0 0 1 1 0 0x40 64
# SUM=0x4E 78
#--------------------------------------------------------
setp lut5_incr.function 0x4E
net net-incr-true lut5_incr.out # indicates that we want to jog-incremental
net incr0 lut5_jog.in-0
net incr1 lut5_jog.in-1
net incr2 lut5_jog.in-2
net incr3 lut5_jog.in-3
#--------------------------------------------------------
# LUT5 function for jog
# HEX DEZ
#dec Bit4 Bit3 Bit2 Bit1 Bit0 Weight Weight
# 04 0 0 1 0 0 0x10 16
# 05 0 0 1 0 1 0x20 32
# 07 0 0 1 1 1 0x80 128
# 08 0 1 0 0 0 0x100 256
# 09 0 1 0 0 1 0x200 512
# 12 0 1 1 0 0 0x1000 4096
# 13 0 1 1 0 1 0x2000 8192
# SUM=0x33B0 13232
#--------------------------------------------------------
setp lut5_jog.function 0x33B0
net net-jog-true lut5_jog.out # indicates that we want to jog
#+++++++++++++++++++++++++++++
# Define a fixed jog speed value for the jog-incremental moves
loadrt constant names=fixed_jog_speed
addf fixed_jog_speed servo-thread
setp fixed_jog_speed.value 1000
#+++++++++++++++++++++++++++++
#+++++++++++++++++++++++++++++
# Use mux2 to choose jog speed source between fixed_jog_speed and mux_encoder output
loadrt mux2 names=mux_jog_speed # for 1 different incr-jog speeds
addf mux_jog_speed servo-thread # add to the servo-thread so it can be used
# Connect mux2 selection input
net net-incr-true => mux_jog_speed.sel # Select fixed jog speed when jog-incremental is active
# Connect mux2 inputs
net net-mux-encoder-out mux_jog_speed.in0 # Variable jog speed from mux_encoder (mux16)
net net-fixed-jog-speed fixed_jog_speed.out mux_jog_speed.in1 # Fixed jog-incremental speed from fixed_jog_speed
# Connect mux output to halui axis jog speed pin
net net-mux2-out mux_jog_speed.out => halui.axis.jog-speed # output of normal jog speed/ fixed jog speed
#+++++++++++++++++++++++++++++
#--feed control with +/- buttons ---------------------------------
#---------------------
# increase feed +1
#---------------------
#net net-vel-increase input.0.btn-top2 => halui.max-velocity.increase # with max-velocity
net net-vel-increase input.0.btn-top2 => halui.feed-override.increase # with feed-override
#---------------------
#---------------------
# decrease feed -1
#---------------------
#net net-input-0-btn-base => halui.max-velocity.decrease # with max-velocity
net net-input-0-btn-base => halui.feed-override.decrease # with feed-override
#---------------------
# -----
# selection of mux16_feed-override values with (mux16)
# -----
# we use a 4 bit 12 position encoder here
loadrt mux16 names=mux16_feed-override # for 16 different incremental steps
addf mux16_feed-override servo-thread # add to the servo-thread so it can be used
# Define the gamepad inputs for selection of incremental / jog values
#
# alps gamepad net
# 2 input.0.abs-hat0x-is-pos incr1
#
# 4 input.0.abs-hat0y-is-neg incr3
# 5 COM
# 3 input.0.abs-y-is-neg incr2
# 1 input.0.abs-x-is-neg incr0
# this is already done in the mux_encoder section
# buttons for the encoder
#net incr0 input.0.abs-x-is-neg
#net incr1 input.0.abs-hat0x-is-pos
#net incr2 input.0.abs-y-is-neg
#net incr3 input.0.abs-hat0y-is-neg
# connect the buttons with the multiplexer
net incr0 mux16_feed-override.sel0
net incr1 mux16_feed-override.sel1
net incr2 mux16_feed-override.sel2
net incr3 mux16_feed-override.sel3
# -----
# Set the values for the mux16 component feed-override
setp mux16_feed-override.in00 0 # 0 0%
setp mux16_feed-override.in01 1 # 1 1%
setp mux16_feed-override.in03 3 # 2 3%
setp mux16_feed-override.in02 10 # 3 10%
setp mux16_feed-override.in06 50 # 4 60%
setp mux16_feed-override.in07 100 # 5 100%
setp mux16_feed-override.in05 0 # 6 0%
setp mux16_feed-override.in04 0 # 7
setp mux16_feed-override.in12 0 # 8
setp mux16_feed-override.in13 0 # 9
setp mux16_feed-override.in09 0 # 10
setp mux16_feed-override.in08 0 # 11
setp mux16_feed-override.in11 0 # # not used
setp mux16_feed-override.in10 0 # # not used
setp mux16_feed-override.in14 0 # # not used
setp mux16_feed-override.in15 0 # # not used
# -----
# selection of rapid-override values with (mux16)
# -----
# we use a 4 bit 12 position encoder here
loadrt mux16 names=mux16_rapid-override # for 16 different incremental steps
addf mux16_rapid-override servo-thread # add to the servo-thread so it can be used
# Define the gamepad inputs for selection of incremental / jog values
#
# alps gamepad net
# 2 input.0.abs-hat0x-is-pos incr1
#
# 4 input.0.abs-hat0y-is-neg incr3
# 5 COM
# 3 input.0.abs-y-is-neg incr2
# 1 input.0.abs-x-is-neg incr0
# this is already done in the mux_encoder section
# buttons for the encoder
#net incr0 input.0.abs-x-is-neg
#net incr1 input.0.abs-hat0x-is-pos
#net incr2 input.0.abs-y-is-neg
#net incr3 input.0.abs-hat0y-is-neg
# connect the buttons with the multiplexer
net incr0 mux16_rapid-override.sel0
net incr1 mux16_rapid-override.sel1
net incr2 mux16_rapid-override.sel2
net incr3 mux16_rapid-override.sel3
# -----
# Set the values for the mux16 component rapid-override
# this values are smaller in the low percentage range to reduce the high rapid moves to a save level
setp mux16_rapid-override.in00 0 # 0 0%
setp mux16_rapid-override.in01 1 # 1 1%
setp mux16_rapid-override.in03 3 # 2 3%
setp mux16_rapid-override.in02 10 # 3 10%
setp mux16_rapid-override.in06 50 # 4 50%
setp mux16_rapid-override.in07 1000 # 5 100%
setp mux16_rapid-override.in05 0 # 6 0%
setp mux16_rapid-override.in04 0 # 7
setp mux16_rapid-override.in12 0 # 8
setp mux16_rapid-override.in13 0 # 9
setp mux16_rapid-override.in09 0 # 10
setp mux16_rapid-override.in08 0 # 11
setp mux16_rapid-override.in11 0 # # not used
setp mux16_rapid-override.in10 0 # # not used
setp mux16_rapid-override.in14 0 # # not used
setp mux16_rapid-override.in15 0 # # not used
# Override with max-velocity example
#setp halui.max-velocity.scale 0.01666666666 # divider for m/min values
#setp halui.max-velocity.direct-value 1 # use absolute velocity values
#net net-max-vel vel_encoder.out-s => halui.max-velocity.counts # use selected mux16 value
# we override with Feed Override + Rapid Override / 2 different mux16 for 2 different value selection
#halui.feed-override.direct-value bit in
setp halui.feed-override.direct-value 1 # uses the direct value, not a percentage
# halui.feed-override.scale float in
setp halui.feed-override.scale 0.01
#halui.feed-override.counts s32 in
net net-feed-override mux16_feed-override.out-s => halui.feed-override.counts # use selected mux16 value
#halui.feed-override.value float out
net net-feed-override.value <= halui.feed-override.value
# halui.rapid-override.direct-value bit in
setp halui.rapid-override.direct-value 1
# halui.rapid-override.scale float in
setp halui.rapid-override.scale 0.001 # scale 0.001 for finer granulation
# halui.rapid-override.counts s32 in
net net-rapid-override mux16_rapid-override.out-s => halui.rapid-override.counts # use selected mux16 value
#halui.rapid-override.value float out
net net-rapid-override.value <= halui.rapid-override.value
#--feed control end ---------------------------------
# --- detect if program is running or paused to prevent error messages when incidentally press buttons for jogging
# so jogging/ incremental-jogging is only commanded when no program is running or paused
# halui.program.is-running
# halui.program.is-paused
loadrt or2 names=or2-programm-is-on
addf or2-programm-is-on servo-thread
loadrt not names=not_on # Load N components for logical NOT operations
addf not_on servo-thread
net net-program.is-running or2-programm-is-on.in0 <= halui.program.is-running # program is running
net net-halui-program-is-paused or2-programm-is-on.in1 # program is paused
net net-programm-is-on or2-programm-is-on.out # program is running or paused
net net-programm-is-on not_on.in # program is running or paused
net net-programm-is-on-not <= not_on.out # program is not running or paused
#net net-programm-is-on-not <= halui.program.is-idle
loadrt and2 names=and_prog-0,and_prog-2,and_prog-4,and_prog-6,and_prog-8,and_prog-10 #Load AND components for logical AND operations
addf and_prog-0 servo-thread #(for x+)
addf and_prog-2 servo-thread
addf and_prog-4 servo-thread
addf and_prog-6 servo-thread
addf and_prog-8 servo-thread
addf and_prog-10 servo-thread #(for z-)
net net-programm-is-on-not and_prog-0.in0 # program is running or paused (for x+)
net net-programm-is-on-not and_prog-2.in0 # program is running or paused
net net-programm-is-on-not and_prog-4.in0 # program is running or paused
net net-programm-is-on-not and_prog-6.in0 # program is running or paused
net net-programm-is-on-not and_prog-8.in0 # program is running or paused
net net-programm-is-on-not and_prog-10.in0 # program is running or paused (for z-)
#+++++++++++++++++++++++++++++
# jog/jog-incremental the axis
#+++++++++++++++++++++++++++++
loadrt and2 names=and_incr_0,and_incr_1,and_incr_2,and_incr_3,and_incr_4,and_incr_5,and_incr_6,and_incr_7,and_incr_8,and_incr_9,and_incr_10,and_incr_11 # Load AND components for logical AND operations
addf and_incr_0 servo-thread
addf and_incr_1 servo-thread
addf and_incr_2 servo-thread
addf and_incr_3 servo-thread
addf and_incr_4 servo-thread
addf and_incr_5 servo-thread
addf and_incr_6 servo-thread
addf and_incr_7 servo-thread
addf and_incr_8 servo-thread
addf and_incr_9 servo-thread
addf and_incr_10 servo-thread
addf and_incr_11 servo-thread
#++++ program is on
# halui.program.is-running----|OR
# |OR─----net-programm-is-on ---|NOT---net-programm-is-on-not
# net-halui-program-is-paused----|OR
# net-programm-is-on-not──|AND
# |AND──input-0-btn-thumb
# input.0.btn-thumb─── |AND
#
#++++ X plus jog
# input-0-btn-thumb─|AND
# |AND──halui.axis.x.plus
# net-jog-true───|AND
#
#++++ X plus incremental
# input.0.btn-thumb───|AND
# |AND──halui.axis.x.increment-plus
# net-incr-true───|AND
#-------------------------------------------------------------------------------------------------------
# old version
#++++ X plus jog
#net net-x-plus-jog input.0.btn-thumb # button pressed input
#net net-x-plus-jog and_incr_0.in0 # if button is pressed
#net net-jog-true and_incr_0.in1 # and lut5_jog is true
#net net-x-plus-jog-out halui.axis.x.plus <= and_incr_0.out # then jog axis
#++++ X plus incremental
#net net-x-plus-jog and_incr_1.in0 # if button is pressed
#net net-incr-true and_incr_1.in1 # and lut5_incr is true
#net net-x-plus-incr-jog-out halui.axis.x.increment-plus <= and_incr_1.out # then jog-incremental axis
#++++ X plus jog
net net-programm-is-on-not1 and_prog-0.in1 input.0.btn-thumb # program is running or paused and button is pressed
net net-x-plus-jog and_prog-0.out #
net net-x-plus-jog and_incr_0.in0 #
net net-jog-true and_incr_0.in1 # and lut5_jog is true
net net-x-plus-jog-out halui.axis.x.plus <= and_incr_0.out # then jog axis
#++++ X plus incremental
net net-x-plus-jog and_incr_1.in0 # if button is pressed
net net-incr-true and_incr_1.in1 # and lut5_incr is true
net net-x-plus-incr-jog-out halui.axis.x.increment-plus <= and_incr_1.out # then jog-incremental axis
#++++ X minus jog
net net-programm-is-on-not2 and_prog-2.in1 input.0.btn-top
net net-x-minus-jog and_prog-2.out # button pressed input
net net-x-minus-jog and_incr_2.in0 # if button is pressed
net net-jog-true and_incr_2.in1 # and lut5_jog is true
net net-x-minus-jog-out halui.axis.x.minus <= and_incr_2.out # then jog axis
#++++ X minus incremental
net net-x-minus-jog and_incr_3.in0 # if button is pressed
net net-incr-true and_incr_3.in1 # and lut5_incr is true
net net-x-minus-incr-jog-out halui.axis.x.increment-minus <= and_incr_3.out # then jog-incremental axis
#-------------------------------------------------------------------------------------------------------
#++++ Y plus jog
net net-programm-is-on-not4 and_prog-4.in1 input.0.btn-trigger
net net-y-plus-jog and_prog-4.out # button pressed input
net net-y-plus-jog and_incr_4.in0 # if button is pressed
net net-jog-true and_incr_4.in1 # and lut5_jog is true
net net-y-plus-jog-out halui.axis.y.plus <= and_incr_4.out # then jog axis
#++++ Y plus incremental
net net-y-plus-jog and_incr_5.in0 # if button is pressed
net net-incr-true and_incr_5.in1 # and lut5_incr is true
net net-y-plus-incr-jog-out halui.axis.y.increment-plus <= and_incr_5.out # then jog-incremental axis
#++++ Y minus jog
net net-programm-is-on-not6 and_prog-6.in1 input.0.btn-thumb2
net net-y-minus-jog and_prog-6.out # button pressed input
net net-y-minus-jog and_incr_6.in0 # if button is pressed
net net-jog-true and_incr_6.in1 # and lut5_jog is true
net net-y-minus-jog-out halui.axis.y.minus <= and_incr_6.out # then jog axis
#++++ Y minus incremental
net net-y-minus-jog and_incr_7.in0 # if button is pressed
net net-incr-true and_incr_7.in1 # and lut5_incr is true
net net-y-minus-incr-jog-out halui.axis.y.increment-minus <= and_incr_7.out # then jog-incremental axis
#-------------------------------------------------------------------------------------------------------#
#++++ Z plus jog
net net-programm-is-on-not8 and_prog-8.in1 input.0.btn-pinkie
net net-z-plus-jog and_prog-8.out # button pressed input
net net-z-plus-jog and_incr_8.in0 # if button is pressed
net net-jog-true and_incr_8.in1 # and lut5_jog is true
net net-z-plus-jog-out halui.axis.z.plus <= and_incr_8.out # then jog axis
#++++ Z plus incremental
net net-z-plus-jog and_incr_9.in0 # if button is pressed
net net-incr-true and_incr_9.in1 # and lut5_incr is true
net net-z-plus-incr-jog-out halui.axis.z.increment-plus <= and_incr_9.out # then jog-incremental axis
#++++ Z minus jog
net net-programm-is-on-not10 and_prog-10.in1 input.0.btn-base2
net net-z-minus-jog and_prog-10.out # button pressed input
net net-z-minus-jog and_incr_10.in0 # if button is pressed
net net-jog-true and_incr_10.in1 # and lut5_jog is true
net net-z-minus-jog-out halui.axis.z.minus <= and_incr_10.out # then jog axis
#++++ Z minus incremental
net net-z-minus-jog and_incr_11.in0 # if button is pressed
net net-incr-true and_incr_11.in1 # and lut5_incr is true
net net-z-minus-incr-jog-out halui.axis.z.increment-minus <= and_incr_11.out# then jog-incremental axis
#-------------------------------------------------------------------------------------------------------
Attachments:
The following user(s) said Thank You: seuchato, tommylight
Please Log in or Create an account to join the conversation.
- juergen-home
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 15
17 Oct 2025 16:09 #336608
by juergen-home





Replied by juergen-home on topic hal file for gamepad pendant with retrofitted 12-position selector switch
Attachments:
Please Log in or Create an account to join the conversation.
- juergen-home
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 15
17 Oct 2025 16:19 #336610
by juergen-home

Replied by juergen-home on topic hal file for gamepad pendant with retrofitted 12-position selector switch
Attachments:
The following user(s) said Thank You: seuchato, tommylight
Please Log in or Create an account to join the conversation.
- seuchato
- Offline
- Platinum Member
-

Less
More
- Posts: 381
- Thank you received: 126
10 Nov 2025 13:48 #338142
by seuchato
Replied by seuchato on topic hal file for gamepad pendant with retrofitted 12-position selector switch
Juergen
Very well done and extremely inspiring!!!
Thanks for sharing. I happen to have one of these gampads trailing around somewhere. Off searching")
Greez
chris
Very well done and extremely inspiring!!!
Thanks for sharing. I happen to have one of these gampads trailing around somewhere. Off searching
Greez
chris
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- HAL
- HAL Examples
- hal file for gamepad pendant with retrofitted 12-position selector switch
Time to create page: 0.475 seconds