Encoder
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17965
- Thank you received: 5268
15 Feb 2022 00:45 #234876
by PCW
Replied by PCW on topic Error Report
yes, edit connections
Please Log in or Create an account to join the conversation.
- Kylizer
- Offline
- Premium Member
-

Less
More
- Posts: 99
- Thank you received: 1
17 Feb 2022 03:52 #235090
by Kylizer
Replied by Kylizer on topic Error Report
Ok, well I have tried and tried and I still can not get it to work. How do I go about changing the host ip adress and disabling ipv6?
Please Log in or Create an account to join the conversation.
- Kylizer
- Offline
- Premium Member
-
Less
More
- Posts: 99
- Thank you received: 1
17 Feb 2022 04:04 #235091
by Kylizer
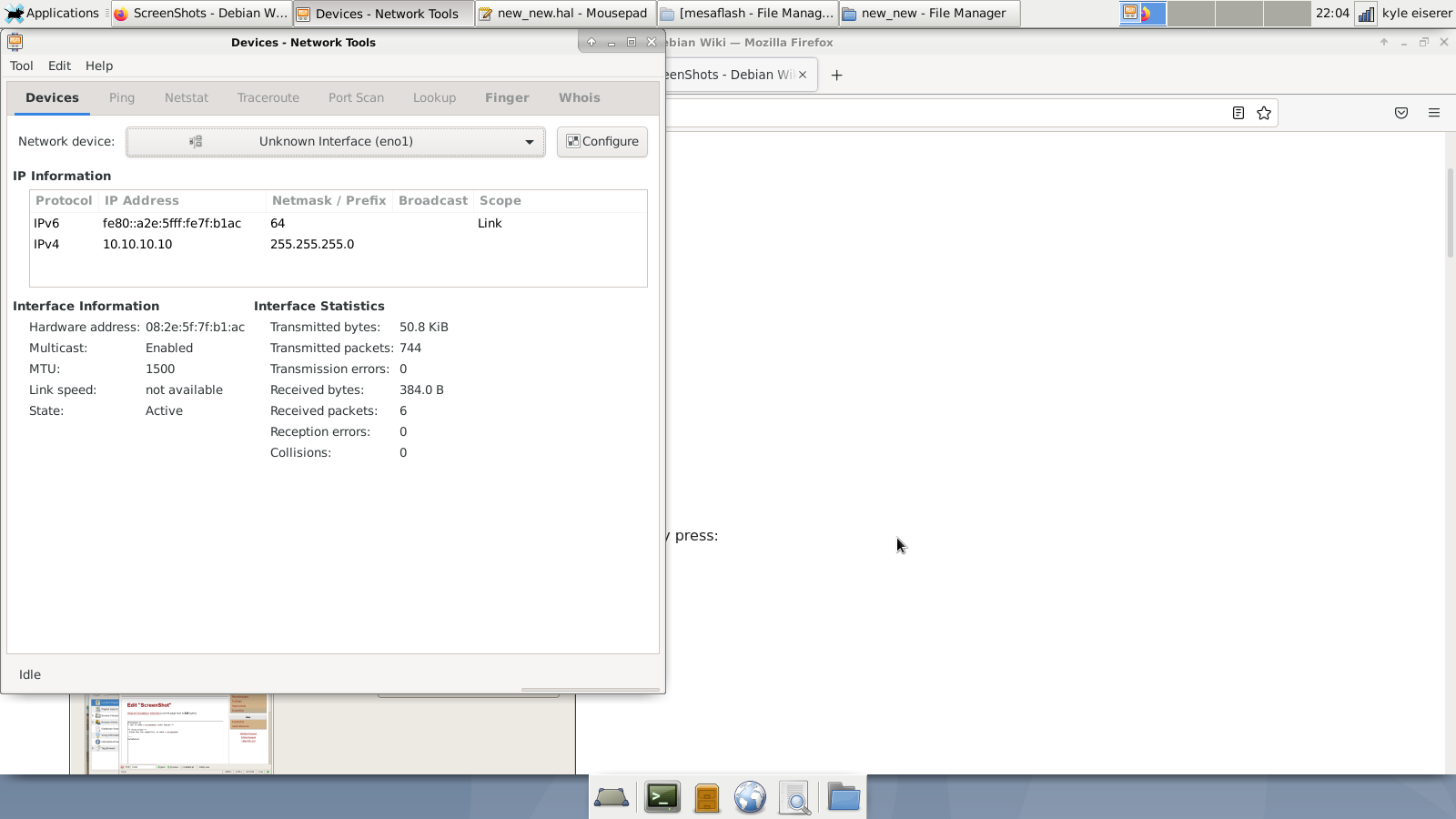
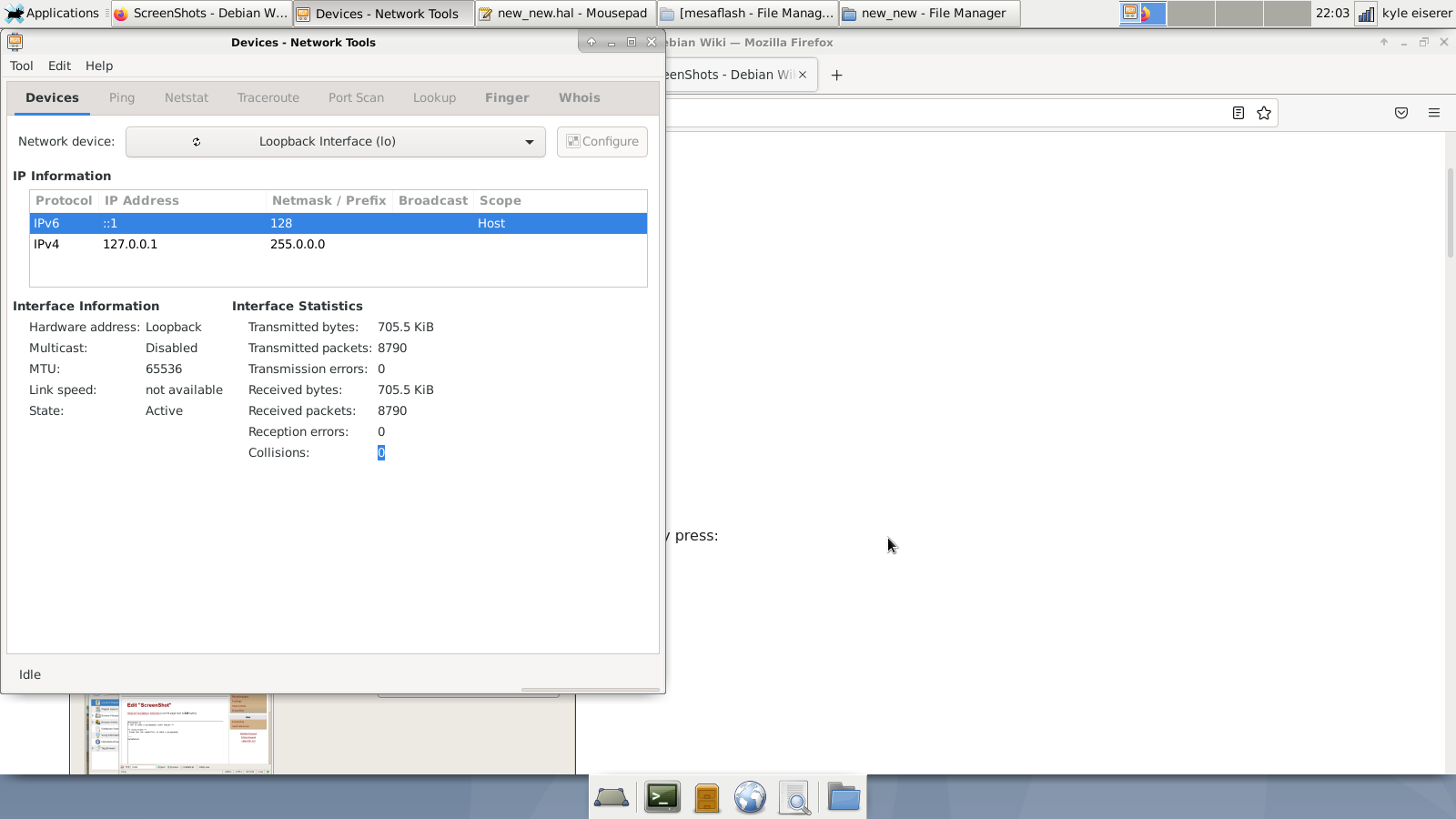
Replied by Kylizer on topic Error Report
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17965
- Thank you received: 5268
17 Feb 2022 06:11 #235098
by PCW
Replied by PCW on topic Error Report
How did you set the address to 10.10.10.10?
Doesn't the "Configure" button open a connection editor?
Doesn't the "Configure" button open a connection editor?
Please Log in or Create an account to join the conversation.
- Kylizer
- Offline
- Premium Member
-
Less
More
- Posts: 99
- Thank you received: 1
17 Feb 2022 06:53 #235103
by Kylizer
Replied by Kylizer on topic Error Report
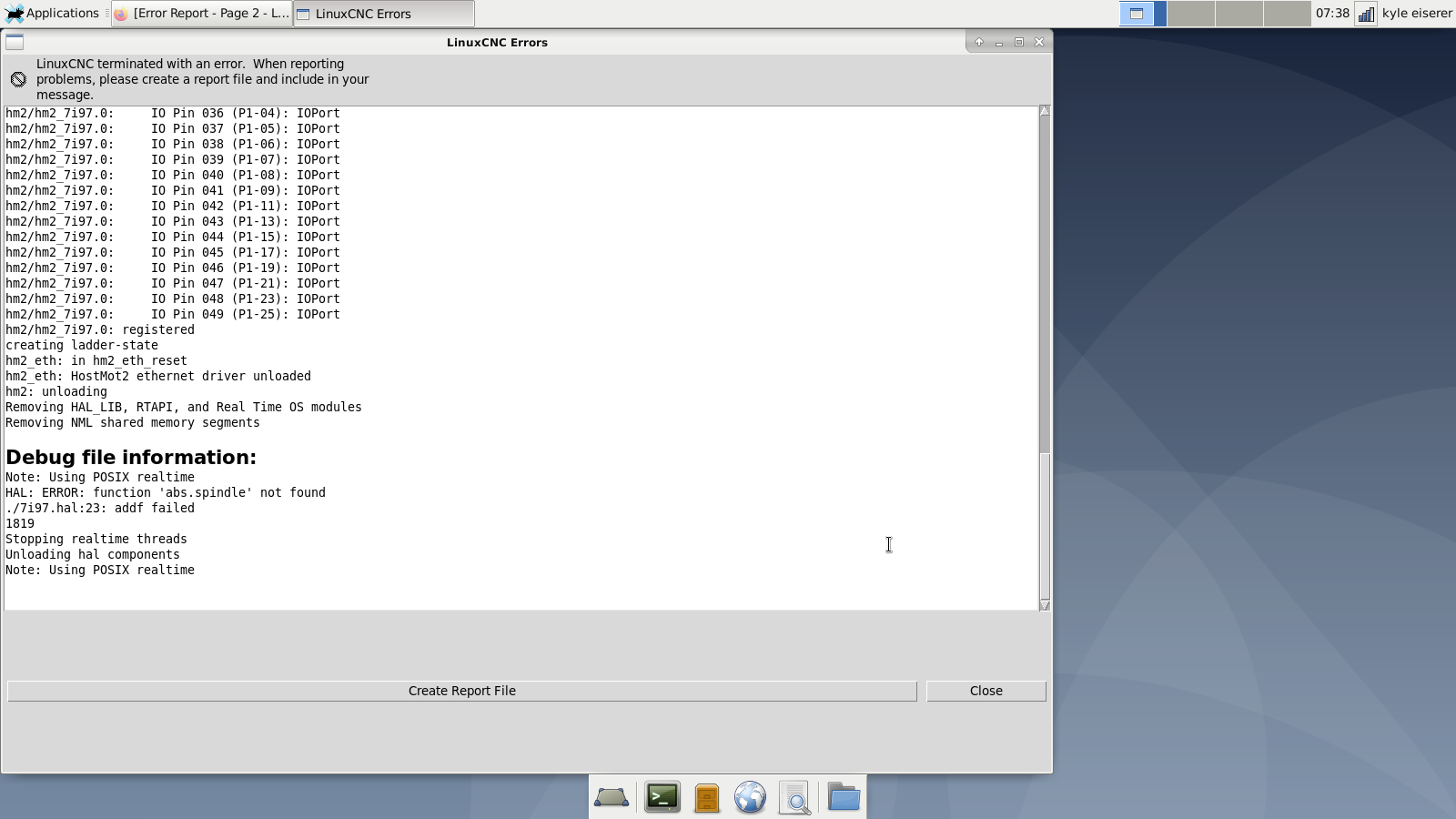
update I finally got it to work but not im getting this
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21702
- Thank you received: 7417
17 Feb 2022 10:02 #235114
by tommylight
Replied by tommylight on topic Error Report
In the hal file, line 10, there is still a line with 7i92 in it instead of 7i97.
Change that.
Change that.
Please Log in or Create an account to join the conversation.
- Kylizer
- Offline
- Premium Member
-
Less
More
- Posts: 99
- Thank you received: 1
17 Feb 2022 13:39 #235131
by Kylizer
Replied by Kylizer on topic Error Report
after making the change I now get this
Attachments:
Please Log in or Create an account to join the conversation.
- Kylizer
- Offline
- Premium Member
-
Less
More
- Posts: 99
- Thank you received: 1
17 Feb 2022 13:50 #235132
by Kylizer
Replied by Kylizer on topic Error Report
# Generated by PNCconf at Wed Feb 16 21:42:33 2022
# Using LinuxCNC version: 2.8
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp [HMOT](CARD0).watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
loadrt classicladder_rt numPhysInputs=15 numPhysOutputs=15 numS32in=10 numS32out=10 numFloatIn=10 numFloatOut=10 numBits=50 numWords=50
addf [HMOT](CARD0).read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf classicladder.0.refresh servo-thread
addf abs.spindle servo-thread
addf lowpass.spindle servo-thread
addf [HMOT](CARD0).write servo-thread
setp [HMOT](CARD0).dpll.01.timer-us -50
setp [HMOT](CARD0).stepgen.timer-number 1
# external output signals
# external input signals
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).7i97.0.1.analogout0-scalemax [JOINT_0]OUTPUT_SCALE
setp [HMOT](CARD0).7i97.0.1.analogout0-minlim [JOINT_0]OUTPUT_MIN_LIMIT
setp [HMOT](CARD0).7i97.0.1.analogout0-maxlim [JOINT_0]OUTPUT_MAX_LIMIT
net x-output => [HMOT](CARD0).7i97.0.1.analogout0
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-enable <= joint.0.amp-enable-out
# enable _all_ sserial pwmgens
net x-enable => [HMOT](CARD0).7i97.0.1.analogena
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.00.counter-mode 0
setp [HMOT](CARD0).encoder.00.filter 1
setp [HMOT](CARD0).encoder.00.index-invert 0
setp [HMOT](CARD0).encoder.00.index-mask 0
setp [HMOT](CARD0).encoder.00.index-mask-invert 0
setp [HMOT](CARD0).encoder.00.scale [JOINT_0]ENCODER_SCALE
net x-pos-fb <= [HMOT](CARD0).encoder.00.position
net x-vel-fb <= [HMOT](CARD0).encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
net x-index-enable joint.0.index-enable <=> [HMOT](CARD0).encoder.00.index-enable
net x-pos-rawcounts <= [HMOT](CARD0).encoder.00.rawcounts
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).7i97.0.1.analogout1-scalemax [JOINT_1]OUTPUT_SCALE
setp [HMOT](CARD0).7i97.0.1.analogout1-minlim [JOINT_1]OUTPUT_MIN_LIMIT
setp [HMOT](CARD0).7i97.0.1.analogout1-maxlim [JOINT_1]OUTPUT_MAX_LIMIT
net y-output => [HMOT](CARD0).7i97.0.1.analogout1
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-enable <= joint.1.amp-enable-out
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.01.counter-mode 0
setp [HMOT](CARD0).encoder.01.filter 1
setp [HMOT](CARD0).encoder.01.index-invert 0
setp [HMOT](CARD0).encoder.01.index-mask 0
setp [HMOT](CARD0).encoder.01.index-mask-invert 0
setp [HMOT](CARD0).encoder.01.scale [JOINT_1]ENCODER_SCALE
net y-pos-fb <= [HMOT](CARD0).encoder.01.position
net y-vel-fb <= [HMOT](CARD0).encoder.01.velocity
net y-pos-fb => joint.1.motor-pos-fb
net y-index-enable joint.1.index-enable <=> [HMOT](CARD0).encoder.01.index-enable
net y-pos-rawcounts <= [HMOT](CARD0).encoder.01.rawcounts
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).7i97.0.1.analogout2-scalemax [JOINT_2]OUTPUT_SCALE
setp [HMOT](CARD0).7i97.0.1.analogout2-minlim [JOINT_2]OUTPUT_MIN_LIMIT
setp [HMOT](CARD0).7i97.0.1.analogout2-maxlim [JOINT_2]OUTPUT_MAX_LIMIT
net z-output => [HMOT](CARD0).7i97.0.1.analogout2
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-enable <= joint.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.02.counter-mode 0
setp [HMOT](CARD0).encoder.02.filter 1
setp [HMOT](CARD0).encoder.02.index-invert 0
setp [HMOT](CARD0).encoder.02.index-mask 0
setp [HMOT](CARD0).encoder.02.index-mask-invert 0
setp [HMOT](CARD0).encoder.02.scale [JOINT_2]ENCODER_SCALE
net z-pos-fb <= [HMOT](CARD0).encoder.02.position
net z-vel-fb <= [HMOT](CARD0).encoder.02.velocity
net z-pos-fb => joint.2.motor-pos-fb
net z-index-enable joint.2.index-enable <=> [HMOT](CARD0).encoder.02.index-enable
net z-pos-rawcounts <= [HMOT](CARD0).encoder.02.rawcounts
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
# Load Classicladder with modbus master included (GUI must run for Modbus)
loadusr classicladder --modmaster custom.clp
Ok so i see whats going on here. I delete the file it talked about and another came up. Where would I go to compare the files to know which lines I need to add and which ones I need to subtract?
# Using LinuxCNC version: 2.8
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="10.10.10.10" config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp [HMOT](CARD0).watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
loadrt classicladder_rt numPhysInputs=15 numPhysOutputs=15 numS32in=10 numS32out=10 numFloatIn=10 numFloatOut=10 numBits=50 numWords=50
addf [HMOT](CARD0).read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf classicladder.0.refresh servo-thread
addf abs.spindle servo-thread
addf lowpass.spindle servo-thread
addf [HMOT](CARD0).write servo-thread
setp [HMOT](CARD0).dpll.01.timer-us -50
setp [HMOT](CARD0).stepgen.timer-number 1
# external output signals
# external input signals
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-pos-fb => pid.x.feedback
net x-output <= pid.x.output
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).7i97.0.1.analogout0-scalemax [JOINT_0]OUTPUT_SCALE
setp [HMOT](CARD0).7i97.0.1.analogout0-minlim [JOINT_0]OUTPUT_MIN_LIMIT
setp [HMOT](CARD0).7i97.0.1.analogout0-maxlim [JOINT_0]OUTPUT_MAX_LIMIT
net x-output => [HMOT](CARD0).7i97.0.1.analogout0
net x-pos-cmd <= joint.0.motor-pos-cmd
net x-enable <= joint.0.amp-enable-out
# enable _all_ sserial pwmgens
net x-enable => [HMOT](CARD0).7i97.0.1.analogena
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.00.counter-mode 0
setp [HMOT](CARD0).encoder.00.filter 1
setp [HMOT](CARD0).encoder.00.index-invert 0
setp [HMOT](CARD0).encoder.00.index-mask 0
setp [HMOT](CARD0).encoder.00.index-mask-invert 0
setp [HMOT](CARD0).encoder.00.scale [JOINT_0]ENCODER_SCALE
net x-pos-fb <= [HMOT](CARD0).encoder.00.position
net x-vel-fb <= [HMOT](CARD0).encoder.00.velocity
net x-pos-fb => joint.0.motor-pos-fb
net x-index-enable joint.0.index-enable <=> [HMOT](CARD0).encoder.00.index-enable
net x-pos-rawcounts <= [HMOT](CARD0).encoder.00.rawcounts
# ---setup home / limit switch signals---
net x-home-sw => joint.0.home-sw-in
net x-neg-limit => joint.0.neg-lim-sw-in
net x-pos-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-pos-fb => pid.y.feedback
net y-output <= pid.y.output
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).7i97.0.1.analogout1-scalemax [JOINT_1]OUTPUT_SCALE
setp [HMOT](CARD0).7i97.0.1.analogout1-minlim [JOINT_1]OUTPUT_MIN_LIMIT
setp [HMOT](CARD0).7i97.0.1.analogout1-maxlim [JOINT_1]OUTPUT_MAX_LIMIT
net y-output => [HMOT](CARD0).7i97.0.1.analogout1
net y-pos-cmd <= joint.1.motor-pos-cmd
net y-enable <= joint.1.amp-enable-out
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.01.counter-mode 0
setp [HMOT](CARD0).encoder.01.filter 1
setp [HMOT](CARD0).encoder.01.index-invert 0
setp [HMOT](CARD0).encoder.01.index-mask 0
setp [HMOT](CARD0).encoder.01.index-mask-invert 0
setp [HMOT](CARD0).encoder.01.scale [JOINT_1]ENCODER_SCALE
net y-pos-fb <= [HMOT](CARD0).encoder.01.position
net y-vel-fb <= [HMOT](CARD0).encoder.01.velocity
net y-pos-fb => joint.1.motor-pos-fb
net y-index-enable joint.1.index-enable <=> [HMOT](CARD0).encoder.01.index-enable
net y-pos-rawcounts <= [HMOT](CARD0).encoder.01.rawcounts
# ---setup home / limit switch signals---
net y-home-sw => joint.1.home-sw-in
net y-neg-limit => joint.1.neg-lim-sw-in
net y-pos-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-pos-fb => pid.z.feedback
net z-output <= pid.z.output
# ---PWM Generator signals/setup---
setp [HMOT](CARD0).7i97.0.1.analogout2-scalemax [JOINT_2]OUTPUT_SCALE
setp [HMOT](CARD0).7i97.0.1.analogout2-minlim [JOINT_2]OUTPUT_MIN_LIMIT
setp [HMOT](CARD0).7i97.0.1.analogout2-maxlim [JOINT_2]OUTPUT_MAX_LIMIT
net z-output => [HMOT](CARD0).7i97.0.1.analogout2
net z-pos-cmd <= joint.2.motor-pos-cmd
net z-enable <= joint.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp [HMOT](CARD0).encoder.02.counter-mode 0
setp [HMOT](CARD0).encoder.02.filter 1
setp [HMOT](CARD0).encoder.02.index-invert 0
setp [HMOT](CARD0).encoder.02.index-mask 0
setp [HMOT](CARD0).encoder.02.index-mask-invert 0
setp [HMOT](CARD0).encoder.02.scale [JOINT_2]ENCODER_SCALE
net z-pos-fb <= [HMOT](CARD0).encoder.02.position
net z-vel-fb <= [HMOT](CARD0).encoder.02.velocity
net z-pos-fb => joint.2.motor-pos-fb
net z-index-enable joint.2.index-enable <=> [HMOT](CARD0).encoder.02.index-enable
net z-pos-rawcounts <= [HMOT](CARD0).encoder.02.rawcounts
# ---setup home / limit switch signals---
net z-home-sw => joint.2.home-sw-in
net z-neg-limit => joint.2.neg-lim-sw-in
net z-pos-limit => joint.2.pos-lim-sw-in
#*******************
# SPINDLE
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm => pid.s.command
net spindle-vel-fb-rpm => pid.s.feedback
net spindle-output <= pid.s.output
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net axis-select-x halui.axis.x.select
net jog-x-pos halui.axis.x.plus
net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
net x-is-homed halui.joint.0.is-homed
net axis-select-y halui.axis.y.select
net jog-y-pos halui.axis.y.plus
net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
net y-is-homed halui.joint.1.is-homed
net axis-select-z halui.axis.z.select
net jog-z-pos halui.axis.z.plus
net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
net z-is-homed halui.joint.2.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.axis.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
# Load Classicladder with modbus master included (GUI must run for Modbus)
loadusr classicladder --modmaster custom.clp
Ok so i see whats going on here. I delete the file it talked about and another came up. Where would I go to compare the files to know which lines I need to add and which ones I need to subtract?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17965
- Thank you received: 5268
17 Feb 2022 14:45 #235138
by PCW
Replied by PCW on topic Error Report
You should start with this hal/ini file set for the 7I97:
(unzip in your home/linuxcnc/configs directory)
(unzip in your home/linuxcnc/configs directory)
Attachments:
Please Log in or Create an account to join the conversation.
- Kylizer
- Offline
- Premium Member
-
Less
More
- Posts: 99
- Thank you received: 1
17 Feb 2022 23:31 #235196
by Kylizer
Replied by Kylizer on topic Error Report
yes. I have it going now and can open it in linuxcnc. So now that I have accomplished this, what do you think my next step should be? Learn how to make all my changes I need to make in the hal file to coordinate with my machine?, or check the pins out, etc. Super newb fyi
Please Log in or Create an account to join the conversation.
Time to create page: 2.022 seconds