Omron MX2
- miniwini
-
 Topic Author
Topic Author
- Offline
- New Member
-

Less
More
- Posts: 8
- Thank you received: 4
09 Jul 2025 08:34 #331565
by miniwini
Omron MX2 was created by miniwini
Hi all!
first of all, great work! I managed to get everything running just by reading all the great posts here! All the nice HowTo´s and so on...
But now i got stuck...
what do i have?
i´m running a RPi 5 with LinuxCNC (latest Preempt Version)
a Mesa 7i76EU (everything working)
a Pendant WHB04-6 (everything working)
and some Beckhoff EtherCat modules (everything working)
and last i got my self an EtherCat Module for the Omron MX2 (partial working)
I can´t figure out how to drive the Omron MX2, there is some mismatch in the type of the controlword
my ethercat xml has only the Modulelist, no special entries like syncmaster and so on...
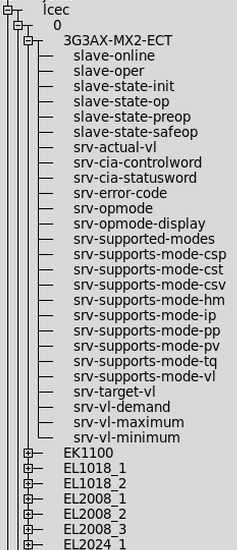
the Device shows up in the HalShow under lcec, all "Pins" are viseble, ethercat slaves shows the device... so i think its just a small config problem in the xml
maybe someone out here who has it running...
Thanks for looking / helping...
Cheers Einar
first of all, great work! I managed to get everything running just by reading all the great posts here! All the nice HowTo´s and so on...
But now i got stuck...
what do i have?
i´m running a RPi 5 with LinuxCNC (latest Preempt Version)
a Mesa 7i76EU (everything working)
a Pendant WHB04-6 (everything working)
and some Beckhoff EtherCat modules (everything working)
and last i got my self an EtherCat Module for the Omron MX2 (partial working)
I can´t figure out how to drive the Omron MX2, there is some mismatch in the type of the controlword
my ethercat xml has only the Modulelist, no special entries like syncmaster and so on...
the Device shows up in the HalShow under lcec, all "Pins" are viseble, ethercat slaves shows the device... so i think its just a small config problem in the xml
maybe someone out here who has it running...
Thanks for looking / helping...
Cheers Einar
Attachments:
The following user(s) said Thank You: besriworld
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
09 Jul 2025 09:47 #331569
by Hakan
Replied by Hakan on topic Omron MX2
If you don't get a good response here you might be better off raising an issue with
the developer at github.com/linuxcnc-ethercat/linuxcnc-ethercat
I think he got one Omron MX2 himself and that's why it is supported directly.
the developer at github.com/linuxcnc-ethercat/linuxcnc-ethercat
I think he got one Omron MX2 himself and that's why it is supported directly.
The following user(s) said Thank You: miniwini
Please Log in or Create an account to join the conversation.
- miniwini
-
Topic Author
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 4
10 Jul 2025 15:30 - 10 Jul 2025 15:35 #331642
by miniwini
Replied by miniwini on topic Omron MX2
hey i got it working... wasnt that hard as i thought...
here my solution...
the ethercat.xml file first... thats the easy part...with this you get all the pins into halshow
then you need to load the main ethercat stuff before the main ui... (ethercat.hal)then go to your machine halfile and add the nets and pins
this works for me ")
thanks again for all the done work in the past to make this so easy nowadays!
cheers miniwini
here my solution...
the ethercat.xml file first... thats the easy part...
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="1">
<slave idx="0" name="EK1100" type="EK1100"/>
<slave idx="1" name="EL1018_1" type="EL1018"/>
<slave idx="2" name="EL1018_2" type="EL1018"/>
<slave idx="3" name="EL2024_1" type="EL2024"/>
<slave idx="4" name="EL2008_1" type="EL2008"/>
<slave idx="5" name="EL2008_2" type="EL2008"/>
<slave idx="6" name="EL2008_3" type="EL2008"/>
<slave idx="7" name="3G3AX-MX2-ECT" type="OMMX2"/>
</master>
</masters>
then you need to load the main ethercat stuff before the main ui... (ethercat.hal)
# ---------------------------------
# EtherCAT and IO HAL for LinuxCNC 2.9.4
# ---------------------------------
# Load EtherCAT configuration (User-space only!)
loadusr -W lcec_conf ethercat-conf.xml
loadrt lcec
addf lcec.read-all servo-thread
addf lcec.write-all servo-thread#*******************
# ETHERCAT SPINDLE - Ethercat mainstuff loaded with ini in ethercat.hal
#*******************
#Load conversions for speed and controlword
loadrt conv_float_s32 count=1
loadrt conv_float_u32 count=1
addf conv-float-s32.0 servo-thread
addf conv-float-u32.0 servo-thread
#Load mux2 for controlword
loadrt mux2 names=mux2.spindle-enable
addf mux2.spindle-enable servo-thread
#mux2 section
#Spindle OFF
setp mux2.spindle-enable.in0 10
#Spindle ON
setp mux2.spindle-enable.in1 15
#networking pins for start / stop
net pdnt.spindle.is-on => mux2.spindle-enable.sel
net spindel-conv conv-float-u32.0.in mux2.spindle-enable.out
net spindle-ctrl-cmd conv-float-u32.0.out => lcec.0.3G3AX-MX2-ECT.srv-cia-controlword
net pdnt.spindle.is-on <= spindle.0.on => mux2.spindle-enable.sel
#networking pins for speed
net spindlespeed spindle.0.speed-out conv-float-s32.0.in
net speed_out conv-float-s32.0.out lcec.0.3G3AX-MX2-ECT.srv-target-vl
# ---Setup spindle at speed signals---
#sets spindle-at-speed truethanks again for all the done work in the past to make this so easy nowadays!
cheers miniwini
Attachments:
Last edit: 10 Jul 2025 15:35 by miniwini.
The following user(s) said Thank You: besriworld
Please Log in or Create an account to join the conversation.
Time to create page: 0.139 seconds