linuxcnc+ethercat drives the AKD servo motor it cannot be moved
- wang
- Offline
- Premium Member
-

Less
More
- Posts: 85
- Thank you received: 0
30 Jun 2021 21:00 #213370
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
hi
No, I did not see location feedback on linuxcnc
No, I did not see location feedback on linuxcnc
Please Log in or Create an account to join the conversation.
- wang
- Offline
- Premium Member
-
Less
More
- Posts: 85
- Thank you received: 0
30 Jun 2021 21:11 #213374
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
hi
Sorry, I didn’t understand what you mean, I’m a novice
Which parameters should I change?
Thank you for your patient guidance
Sorry, I didn’t understand what you mean, I’m a novice
Which parameters should I change?
Thank you for your patient guidance
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-

Less
More
- Posts: 790
- Thank you received: 276
30 Jun 2021 21:27 #213377
by db1981
Replied by db1981 on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
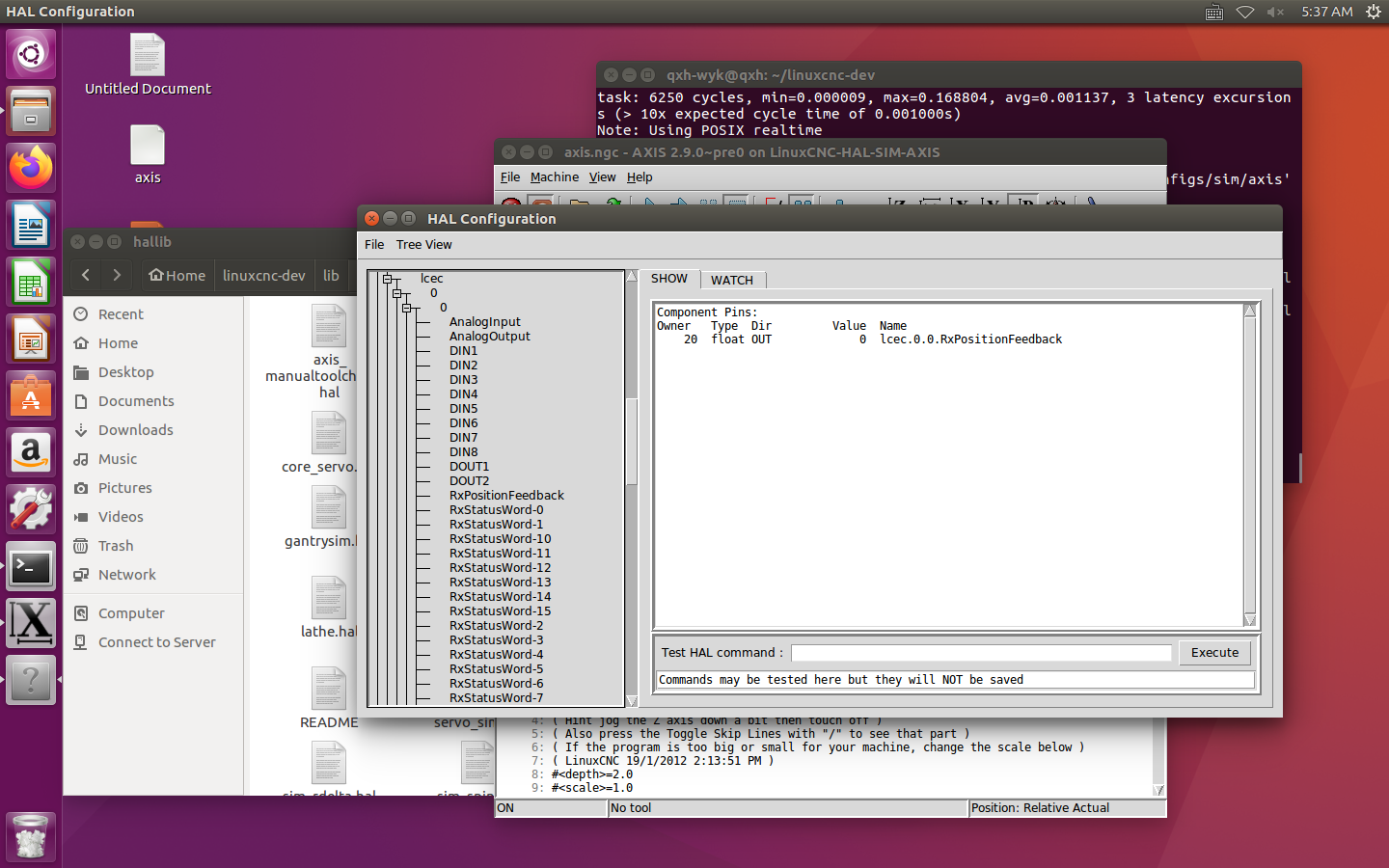
first check the feedback...
open hal show (Menu -> Show hal configuration) navigate to pins -> lcec > 0 > 0 > your feedback pin and check if the value changes, while turning the motor shaft.
open hal show (Menu -> Show hal configuration) navigate to pins -> lcec > 0 > 0 > your feedback pin and check if the value changes, while turning the motor shaft.
The following user(s) said Thank You: wang
Please Log in or Create an account to join the conversation.
- wang
- Offline
- Premium Member
-
Less
More
- Posts: 85
- Thank you received: 0
30 Jun 2021 21:41 #213381
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
Thank you
Following your guidance, I found no feedback
Following your guidance, I found no feedback
Attachments:
Please Log in or Create an account to join the conversation.
- wang
- Offline
- Premium Member
-
Less
More
- Posts: 85
- Thank you received: 0
30 Jun 2021 21:50 #213385
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
Thank you...
I modified the hal file, and now there is feedback, but the parameter is too large to exceed the stroke
I modified the hal file, and now there is feedback, but the parameter is too large to exceed the stroke
Please Log in or Create an account to join the conversation.
- wang
- Offline
- Premium Member
-
Less
More
- Posts: 85
- Thank you received: 0
30 Jun 2021 22:10 #213390
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
thank you
I have another question
What statement should be used to set the scale?
I have another question
What statement should be used to set the scale?
Please Log in or Create an account to join the conversation.
- wang
- Offline
- Premium Member
-
Less
More
- Posts: 85
- Thank you received: 0
01 Jul 2021 00:47 #213398
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
hi
Thank you for your continued help

I have the following error, do you know how to solve it
Thank you for your continued help
I have the following error, do you know how to solve it
emc/task/taskintf.cc 947: Error on joint 0, command number 122
task: main loop took 0.037478 seconds
task: main loop took 0.088289 seconds
joint 0 following error
emc/task/taskintf.cc 947: Error on joint 0, command number 162
task: main loop took 0.037100 seconds
task: main loop took 0.055096 seconds
joint 0 following error
emc/task/taskintf.cc 947: Error on joint 0, command number 202
task: main loop took 0.036831 seconds
task: main loop took 0.046237 secondsPlease Log in or Create an account to join the conversation.
- wang
- Offline
- Premium Member
-
Less
More
- Posts: 85
- Thank you received: 0
07 Sep 2021 14:19 #219854
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
Thank you for your reply, I have read your explanation before.
According to your explanation, I changed my scale to
Only in this way can my movement axis be stable, but when I issue an instruction to move 1mm, the actual movement is not 1mm but about 6mm.
I use AKD drives and linear motors. I don't know what kind of algorithm should be used to calculate the scale to fully adapt linuxcnc to my machine tool. I want the instruction to move 1mm to make the motor actually move 1mm.
Looking forward to your reply, I want to know what this algorithm looks like, rather than simply changing a certain value.
According to your explanation, I changed my scale to
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="poscommand" halType="float" scale="-1000000"/>
<pdoEntry idx="6064" subIdx ="00" bitLen="32" halPin="pos" halType="float" scale="-0.000001"/>Only in this way can my movement axis be stable, but when I issue an instruction to move 1mm, the actual movement is not 1mm but about 6mm.
I use AKD drives and linear motors. I don't know what kind of algorithm should be used to calculate the scale to fully adapt linuxcnc to my machine tool. I want the instruction to move 1mm to make the motor actually move 1mm.
Looking forward to your reply, I want to know what this algorithm looks like, rather than simply changing a certain value.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
07 Sep 2021 21:27 #219883
by db1981
Replied by db1981 on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
That depends on the scaling setup in the AKD Drive. increments / 1 Motor revolution + Mechanical transmission.
How is this axis mechanical build? Screw pitch, toothbelt ?
How is this axis mechanical build? Screw pitch, toothbelt ?
Please Log in or Create an account to join the conversation.
- wang
- Offline
- Premium Member
-
Less
More
- Posts: 85
- Thank you received: 0
08 Sep 2021 07:05 #219914
by wang
Replied by wang on topic linuxcnc+ethercat drives the AKD servo motor it cannot be moved
I use an AKD drive + linear motor, but I am also using a linear motor for the first time, and I don't know much about the parameters required to set the scale.
Please Log in or Create an account to join the conversation.
Time to create page: 0.248 seconds