FLOAT PIN FOR FOLLOWING ERRORS?
- COlger81
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 187
- Thank you received: 6
13 Nov 2018 18:59 #120593
by COlger81
FLOAT PIN FOR FOLLOWING ERRORS? was created by COlger81
Can anyone tell me where to find the floating output pin that displays following errors?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 4753
- Thank you received: 1458
13 Nov 2018 20:33 #120606
by Todd Zuercher
Replied by Todd Zuercher on topic FLOAT PIN FOR FOLLOWING ERRORS?
There are several, in Master there is, joint.N.f−error, and pid.N.error. (these two may not always agree, it depends on when in the servo thread they are sampled and calculated)
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
13 Nov 2018 22:00 #120627
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
Thank you. What is the math used for the following error units? I'm running a diagnostic program to tune analog drives. I'm getting .030" reading at 150 IPM from all 3 drives. Obviously that's not accurate if it's in machine units...
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17940
- Thank you received: 5255
13 Nov 2018 22:34 #120630
by PCW
Replied by PCW on topic FLOAT PIN FOR FOLLOWING ERRORS?
Following error is in machine units 
Please Log in or Create an account to join the conversation.
- andypugh
-

- Online
- Moderator
-
Less
More
- Posts: 19871
- Thank you received: 4640
14 Nov 2018 12:45 #120666
by andypugh
You can compare to the joint.N.f-err-lim HAL pin to check whether the error is in machine units or LinuxCNC internal units.
Note that 0.030" error does not _necessarily_ mean that the tool is that for off the programmed path. It might be exactly on the path and 0.030" "late"
Replied by andypugh on topic FLOAT PIN FOR FOLLOWING ERRORS?
Thank you. What is the math used for the following error units? I'm running a diagnostic program to tune analog drives. I'm getting .030" reading at 150 IPM from all 3 drives. Obviously that's not accurate if it's in machine units...
You can compare to the joint.N.f-err-lim HAL pin to check whether the error is in machine units or LinuxCNC internal units.
Note that 0.030" error does not _necessarily_ mean that the tool is that for off the programmed path. It might be exactly on the path and 0.030" "late"
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 12:52 #120668
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
Late as in the floating pin isn't keeping up with the servo thread?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Online
- Moderator
-
Less
More
- Posts: 19871
- Thank you received: 4640
14 Nov 2018 12:55 #120670
by andypugh
Replied by andypugh on topic FLOAT PIN FOR FOLLOWING ERRORS?
No, in that the tool is on the path, but not as far along the path as the programmed point.
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 13:09 #120673
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
After stiffening up the drives considerably, i was able to get the following errors down to .0035" from .030" at 150 IPM. Problem is i was getting random oscillation when tuned that aggressively. I have Fadal 5000 line/20,000 count AC drives with 3 adjustment pots; balance, signal gain, and compensation. So it has PI of the PID, and balance. Would you recommend leaving all software PID values at 0 and only adjusting on the drives?
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 13:55 #120677
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
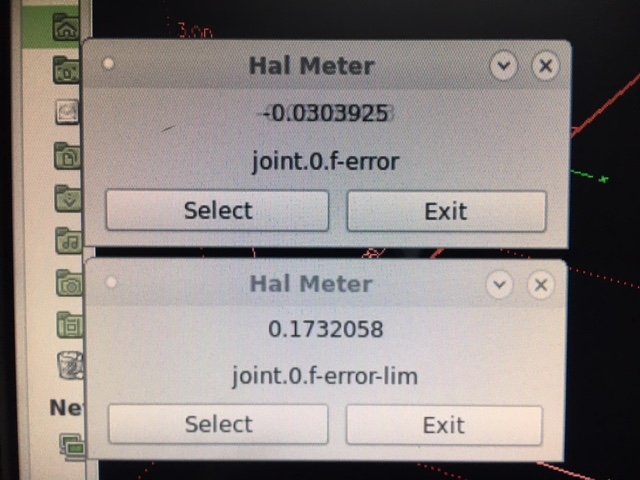
What is the math behind the f-error-lim "limit"? Attached is a picture of f-error and f-error-lim at 150 IPM.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Online
- Moderator
-
Less
More
- Posts: 19871
- Thank you received: 4640
14 Nov 2018 14:03 #120678
by andypugh
Replied by andypugh on topic FLOAT PIN FOR FOLLOWING ERRORS?
f-error-lim is a linear interpolation between MIN_FERROR and MAX_FERROR from the INI between zero velocity and MAX_VELOCITY.
Please Log in or Create an account to join the conversation.
Time to create page: 0.138 seconds