FLOAT PIN FOR FOLLOWING ERRORS?
- COlger81
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 14:10 #120679
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
What following error would you expect to see roughly at 150 IPM from a decent mill? .030" (.762mm) seems pretty extreme and i think i have some tuning to do.
Please Log in or Create an account to join the conversation.
- dgarrett
- Offline
- Platinum Member
-

Less
More
- Posts: 492
- Thank you received: 297
14 Nov 2018 14:24 #120681
by dgarrett
Replied by dgarrett on topic FLOAT PIN FOR FOLLOWING ERRORS?
joint.N.f-error-lim is a hal output pin from the motion module
linuxcnc.org/docs/master/html/man/man9/motion.9.html
Relevant ini settings:Ref: linuxcnc.org/docs/master/html/config/ini-config.html
Note: Above docs are for the master branch (2.8~pre)
$ man motion
...
joint.N.f−error−lim OUT FLOAT
The following error limit
...Relevant ini settings:
2.13. [JOINT_<num>]Section
...
MIN_FERROR = 0.010 - This is the value in machine
units by which the axis is permitted to deviate
from commanded position at very low speeds. If
MIN_FERROR is smaller than FERROR, the two produce
a ramp of error trip points. You could think of
this as a graph where one dimension is speed and
the other is permitted following error. As speed
increases the amount of following error also
increases toward the FERROR value.
FERROR = 1.0 - FERROR is the maximum allowable
following error, in machine units. If the
difference between commanded and sensed position
exceeds this amount, the controller disables servo
calculations, sets all the outputs to 0.0, and
disables the amplifiers. If MIN_FERROR is present
in the .ini file, velocity-proportional following
errors are used. Here, the maximum allowable
following error is proportional to the speed, with
FERROR applying to the rapid rate set by
[TRAJ]MAX_VELOCITY, and proportionally smaller
following errors for slower speeds. The maximum
allowable following error will always be greater
than MIN_FERROR. This prevents small following
errors for stationary axes from inadvertently
aborting motion. Small following errors will
always be present due to vibration, etc.Note: Above docs are for the master branch (2.8~pre)
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-

Less
More
- Posts: 19871
- Thank you received: 4640
14 Nov 2018 14:29 #120682
by andypugh
It depends a lot on the machine, and also how the acceleration and velocity limits in the controller compare to the actual physical limits of the machine.
Do you have reason to believe that things were better before switching to 2.8, or had you just not really looked in detail?
(Assuming I have not got my posters mixed up).
What happens if you lower the acceleration limits of the joints, does the f-error reduce?
I-gain might help.
When cruising at high speed and with a large f-error, is the amplifier anywhere near saturated?
Replied by andypugh on topic FLOAT PIN FOR FOLLOWING ERRORS?
What following error would you expect to see roughly at 150 IPM from a decent mill? .030" (.762mm) seems pretty extreme and i think i have some tuning to do.
It depends a lot on the machine, and also how the acceleration and velocity limits in the controller compare to the actual physical limits of the machine.
Do you have reason to believe that things were better before switching to 2.8, or had you just not really looked in detail?
(Assuming I have not got my posters mixed up).
What happens if you lower the acceleration limits of the joints, does the f-error reduce?
I-gain might help.
When cruising at high speed and with a large f-error, is the amplifier anywhere near saturated?
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 16:35 #120688
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
Lowering accelerations had no effect on the following errors. I am using the halscope right now. I think it's just a tuning issue.
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 20:34 #120697
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
Andy;
I was getting too aggressive on the drives so i changed my plan. I tuned the drives to Fadal manual spec. Now i'm going through PID tuning in software. Halscope looks pretty linear as far as following errors go. I just need to stiffen them up to reduce following errors. Any starting suggestions? I lowered max velocity to 30 and I'm at P of 120 currently.
I was getting too aggressive on the drives so i changed my plan. I tuned the drives to Fadal manual spec. Now i'm going through PID tuning in software. Halscope looks pretty linear as far as following errors go. I just need to stiffen them up to reduce following errors. Any starting suggestions? I lowered max velocity to 30 and I'm at P of 120 currently.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17940
- Thank you received: 5255
14 Nov 2018 20:54 #120698
by PCW
Replied by PCW on topic FLOAT PIN FOR FOLLOWING ERRORS?
Are the drives running in velocity mode?
If so the main tuning is via FF1
If so the main tuning is via FF1
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 21:33 - 14 Nov 2018 21:34 #120703
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
Yes, they are in velocity mode. I currently have P=400 and FF1=1.152;
2.88volts at 150 ipm
10volts at 520.833
520.833/60=8.681
10/8.681=1.152
Does this look correct?
(I'm getting .007" following error at 150 IPM)
2.88volts at 150 ipm
10volts at 520.833
520.833/60=8.681
10/8.681=1.152
Does this look correct?
(I'm getting .007" following error at 150 IPM)
Last edit: 14 Nov 2018 21:34 by COlger81.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17940
- Thank you received: 5255
14 Nov 2018 21:59 #120704
by PCW
Replied by PCW on topic FLOAT PIN FOR FOLLOWING ERRORS?
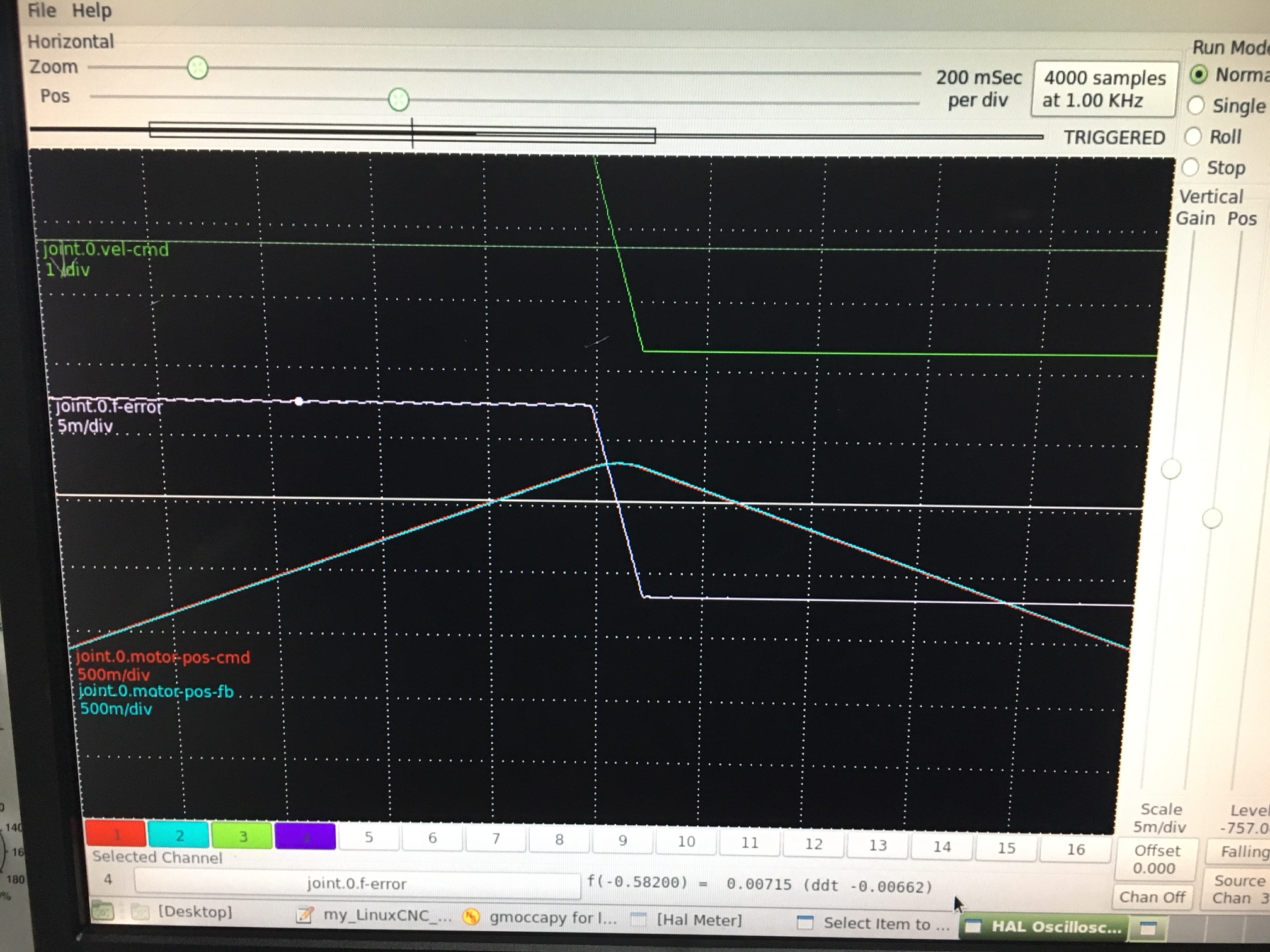
Can you post a halscope plot of following error + commanded velocity?
Note that even if you cannot get the calibrate popup to work,
you can set the PID parameters "live" via halcmd. You can also do this with
halshow, but halcmd is easier since it has the consoles command history and line editing features
Note that even if you cannot get the calibrate popup to work,
you can set the PID parameters "live" via halcmd. You can also do this with
halshow, but halcmd is easier since it has the consoles command history and line editing features
Please Log in or Create an account to join the conversation.
- COlger81
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 187
- Thank you received: 6
14 Nov 2018 22:21 #120705
by COlger81
Replied by COlger81 on topic FLOAT PIN FOR FOLLOWING ERRORS?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17940
- Thank you received: 5255
14 Nov 2018 22:33 - 14 Nov 2018 22:39 #120706
by PCW
Replied by PCW on topic FLOAT PIN FOR FOLLOWING ERRORS?
That looks like almost exclusively FF1 tweaking needed:
( halcmd setp pid.N.ff1 something, make a 10% change, is it better or worse? )
( halcmd setp pid.N.ff1 something, make a 10% change, is it better or worse? )
Last edit: 14 Nov 2018 22:39 by PCW.
Please Log in or Create an account to join the conversation.
Time to create page: 0.512 seconds