ATC with carousel.comp and M6 remap
- gmarconi2
- Offline
- Junior Member
-

Less
More
- Posts: 36
- Thank you received: 5
20 Feb 2019 19:01 #126829
by gmarconi2
ATC with carousel.comp and M6 remap was created by gmarconi2
Leaving aside the movement of the carousel I would like to know if the sequence of unloading the tool from the spindle is this:
net arm-act motion.digital-out-02 => hm2_5i25.0.7i76.0.0.output-02
This command moves the ATC arm under the spindle, then
net arm-in motion.digital-in-02 <= hm2_5i25.0.7i76.0.0.input-02
Arm under the spindle
net tool-release motion.digital-out-03 => hm2_5i25.0.7i76.0.0.output-03
Release the tool
net tool-released motion.digital-in-03 <= hm2_5i25.0.7i76.0.0.input-03
Tool released
How then comes the arm out.
With this routine it seems that the movement of the arm and the locking of the tool is pneumatic, that's how it is.
In my case that the arm moves through a motor, how can I do to get the arm back out.
Greetings gmarconi2
net arm-act motion.digital-out-02 => hm2_5i25.0.7i76.0.0.output-02
This command moves the ATC arm under the spindle, then
net arm-in motion.digital-in-02 <= hm2_5i25.0.7i76.0.0.input-02
Arm under the spindle
net tool-release motion.digital-out-03 => hm2_5i25.0.7i76.0.0.output-03
Release the tool
net tool-released motion.digital-in-03 <= hm2_5i25.0.7i76.0.0.input-03
Tool released
How then comes the arm out.
With this routine it seems that the movement of the arm and the locking of the tool is pneumatic, that's how it is.
In my case that the arm moves through a motor, how can I do to get the arm back out.
Greetings gmarconi2
Please Log in or Create an account to join the conversation.
- Leon82
- Offline
- Platinum Member
-

Less
More
- Posts: 592
- Thank you received: 79
21 Feb 2019 20:41 - 21 Feb 2019 20:41 #126876
by Leon82
Replied by Leon82 on topic ATC with carousel.comp and M6 remap
I don't know much about the Mesa cards but wouldn't the second line go last?
Arm forward
Unclamp
There is missing stuff here
(
You need to either lower the arm or raise the spindle.
Index the next tool
Raise the arm or lower the spindle
)
Clamp
Arm back
Normally you would want some proximity sensor interlocks so it can't move the head thru the arm
Arm forward
Unclamp
There is missing stuff here
(
You need to either lower the arm or raise the spindle.
Index the next tool
Raise the arm or lower the spindle
)
Clamp
Arm back
Normally you would want some proximity sensor interlocks so it can't move the head thru the arm
Last edit: 21 Feb 2019 20:41 by Leon82.
Please Log in or Create an account to join the conversation.
- gmarconi2
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 5
22 Feb 2019 10:55 #126902
by gmarconi2
Replied by gmarconi2 on topic ATC with carousel.comp and M6 remap
Thanks for the answer Leon82
Yes, in addition to the commands that I have listed I serve those you have highlighted, I just wanted to confirm if the logic of catousel.comp is for an arm drive with a pneumatic system and not with step motors as in my case.
The assignments for mesa are correct I have verified them, I have to insert the various end of the race in the ATC so I would like to understand exactly how I have to do.
Hi gmarconi2
Yes, in addition to the commands that I have listed I serve those you have highlighted, I just wanted to confirm if the logic of catousel.comp is for an arm drive with a pneumatic system and not with step motors as in my case.
The assignments for mesa are correct I have verified them, I have to insert the various end of the race in the ATC so I would like to understand exactly how I have to do.
Hi gmarconi2
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19886
- Thank you received: 4645
26 Feb 2019 21:37 #127196
by andypugh
What sort of motor? Does it have end-stops or does it need homing?
Replied by andypugh on topic ATC with carousel.comp and M6 remap
With this routine it seems that the movement of the arm and the locking of the tool is pneumatic, that's how it is.
In my case that the arm moves through a motor, how can I do to get the arm back out.
What sort of motor? Does it have end-stops or does it need homing?
Please Log in or Create an account to join the conversation.
- gmarconi2
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 5
27 Feb 2019 10:33 #127233
by gmarconi2
Replied by gmarconi2 on topic ATC with carousel.comp and M6 remap
Andypugh rereading your previous aid to my post I managed to configure the pin hal of my mesa 7i76, through hal show I see how the pins react to the tool change.
Unfortunately I did not finish now I have to run my ATC.
For the moment, I'm leaving the spindle.
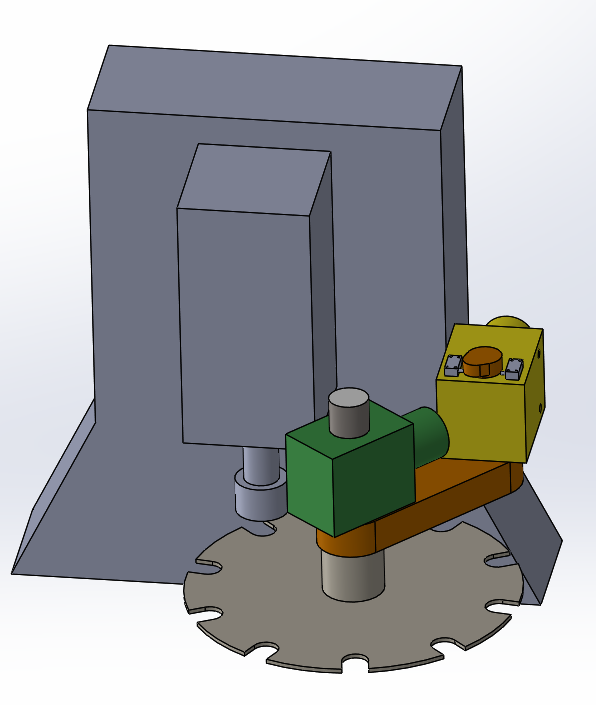
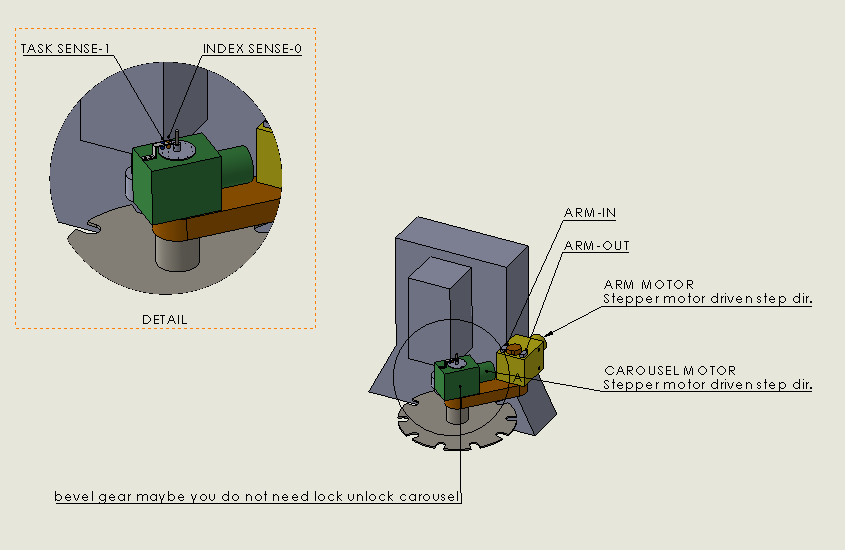
I enclose a drawing of how my ATC is made and how I would mount the sensors.
Thanks in advance for the help
Greetings Gmarconi2
Unfortunately I did not finish now I have to run my ATC.
For the moment, I'm leaving the spindle.
I enclose a drawing of how my ATC is made and how I would mount the sensors.
Thanks in advance for the help
Greetings Gmarconi2
Attachments:
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
27 Feb 2019 15:51 #127252
by andypugh
Replied by andypugh on topic ATC with carousel.comp and M6 remap
I would suggest using a couple of stepgens in velocity mode to drive the stepper motors.
Use analogue outputs from the G-code to drive the arm in and out (just send a speed straight to the motor, stop when it hits the end-stop, which will need a sensor)
The carousel component outputs velocity for the carousel directly, so that stepgen can be direct-wired (in HAL)
I think that a stepper will probably have enough holding torque to not need a carousel lock.
Use analogue outputs from the G-code to drive the arm in and out (just send a speed straight to the motor, stop when it hits the end-stop, which will need a sensor)
The carousel component outputs velocity for the carousel directly, so that stepgen can be direct-wired (in HAL)
I think that a stepper will probably have enough holding torque to not need a carousel lock.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
27 Feb 2019 15:54 #127253
by andypugh
Replied by andypugh on topic ATC with carousel.comp and M6 remap
Note that in the above, I am talking about the 2.8 version of carousel. The analogue speed outputs are not present in the 2.7 version. But it is fairly easy to install the 2.8 version in 2.7 with halcompile. (halcompile -install carousel.comp) after downloading the
source file
,
Please Log in or Create an account to join the conversation.
- gmarconi2
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 5
27 Feb 2019 16:03 - 27 Feb 2019 17:06 #127254
by gmarconi2
Replied by gmarconi2 on topic ATC with carousel.comp and M6 remap
Thanks andypugh
So I add another pin in the toolchange_index.hal and connect it to an output of mesa7i76 and edit this in toolchange.ncg:
M65 P2; move arm back out
M66 P4 L3 Q5; wait for arm-out = true
O111 if [# 5399 LT 0]
(abort, failed to move arm out)
O111 endif
it's correct ???
Hi gmarconi2
So I add another pin in the toolchange_index.hal and connect it to an output of mesa7i76 and edit this in toolchange.ncg:
M65 P2; move arm back out
M66 P4 L3 Q5; wait for arm-out = true
O111 if [# 5399 LT 0]
(abort, failed to move arm out)
O111 endif
it's correct ???
Hi gmarconi2
Last edit: 27 Feb 2019 17:06 by gmarconi2.
Please Log in or Create an account to join the conversation.
- gmarconi2
- Offline
- Junior Member
-
Less
More
- Posts: 36
- Thank you received: 5
27 Feb 2019 16:07 #127255
by gmarconi2
Replied by gmarconi2 on topic ATC with carousel.comp and M6 remap
Thanks andypugh
I had not read the second post of response and thought to modify the 2.7 using an ad hoc harware to change the direction of the arm
anyway now I look at the 2.8
I had not read the second post of response and thought to modify the 2.7 using an ad hoc harware to change the direction of the arm
anyway now I look at the 2.8
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
27 Feb 2019 16:12 - 27 Feb 2019 16:12 #127256
by andypugh
There is no reason to use hardware. It could be done in HAL even with the 2.7 version of carousel.
But it is a fair bit simpler with the updated version of carousel.comp
Replied by andypugh on topic ATC with carousel.comp and M6 remap
Thanks andypugh
I had not read the second post of response and thought to modify the 2.7 using an ad hoc harware to change the direction of the arm
There is no reason to use hardware. It could be done in HAL even with the 2.7 version of carousel.
loadrt mux4 count=1
addf mux4.0 servo-thread
...
net fwd carousel.0.motor-fwd mux4.0.sel0
net rev carousel.0.motor-rev mux4.0.sel1
setp mux4.0.in0 0
setp mux4.0.in1 100
setp mux4.0.in2 -100
setp mux4.0.in3 0
net motor-speed mux4.0.out stepgen.5.velocity-commandBut it is a fair bit simpler with the updated version of carousel.comp
Last edit: 27 Feb 2019 16:12 by andypugh.
Please Log in or Create an account to join the conversation.
Time to create page: 0.194 seconds