- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Ethercat with EL6751 CanOpen Master and JAT Servo Drives
Ethercat with EL6751 CanOpen Master and JAT Servo Drives
- chimeno
- Offline
- Elite Member
-

- Posts: 295
- Thank you received: 125
If I had them, it would be helpful, of course, although I think we are quite far away, I attach a new file to see if you have any progress, since the TWINCAT3 project that you passed me is not available, can you see if this data is correct?Do you think that may help If you have such a EL6751 and maybe one servo drive at hand? If you are interested I can provide both devices to you.
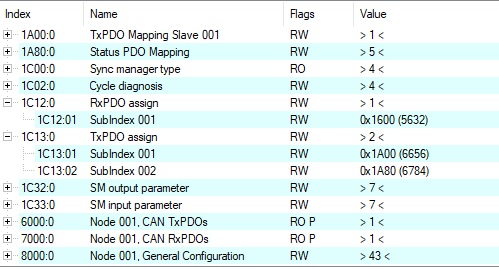
<sdoConfig idx="1c12" subIdx="complete">
<sdoDataRaw data="01 00 00 16"/>
</sdoConfig>
<sdoConfig idx="1c13" subIdx="complete">
<sdoDataRaw data="02 00 00 1A 80 1A"/>
</sdoConfig>I enclose a simpler V2 version that might work
greeting
Chimeno
Please Log in or Create an account to join the conversation.
- JimPanski
- Offline
- Senior Member
-

- Posts: 60
- Thank you received: 3
first of all I was asking if you have those devices because I got a second set op it here wich I could maybe share if you are interested.
I tried you configs with no luck :/
[ 966.439705] EtherCAT: Successfully requested master 0.
[ 966.439833] EtherCAT 0: Domain0: Logical address 0x00000000, 7 byte, expected working counter 3.
[ 966.439835] EtherCAT 0: Datagram domain0-0-main: Logical offset 0x00000000, 7 byte, type LRW.
[ 966.442961] EtherCAT 0: Master thread exited.
[ 966.442965] EtherCAT 0: Starting EtherCAT-OP thread.
[ 966.443031] EtherCAT WARNING 0: 1 datagram UNMATCHED!
[ 966.767726] EtherCAT ERROR 0-1: SDO download 0x8003 (151 bytes) aborted.
[ 966.767731] EtherCAT ERROR 0-1: SDO abort message 0x06090011: "Subindex does not exist".
[ 966.767733] EtherCAT ERROR 0-1: SDO configuration failed.
[ 966.771742] EtherCAT 0: Slave states on main device: PREOP, OP.
EDIT: I am honestly not sure about index 1c13
thank you very much!
Greetings
Conny
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
I don't have them, I could be interested, although then I need another device with CAN-OPEN protocol for the tests that I don't have eitherfirst of all I was asking if you have those devices because I got a second set op it here wich I could maybe share if you are interested.
I don't know how else I can help you
greeting
Chimeno
Please Log in or Create an account to join the conversation.
- JimPanski
- Offline
- Senior Member
-
- Posts: 60
- Thank you received: 3
do you mean an other device besides that JAT drive?
If not sending you those both components wont be a big thing to me
")
Thank you!
Conny
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
Sorry for taking the time to answer, if I refer to both components, I am from Barcelona, Spain, are you progressing?
greeting
Chimeno
Please Log in or Create an account to join the conversation.
- JimPanski
- Offline
- Senior Member
-
- Posts: 60
- Thank you received: 3
no problem. I also had noch chance to get further because of less time for it.But the lathe on which i want to use those drives got a bunch of new wiring and lot a new paint in the meantime
") - but still much to do on it.
- but still much to do on it.For this PDO issue I also don´t know what else I could try, so this was also a reason why it gets no progress her.
I think -if you really have no problem with that- the best is you reach me by mail on my account "myusernamehere" at online.de so we can discuss the details for the parcel
Thank you very much!
Greetings
Conny
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
No problem I sent you an email.
Best regards
Chimeno
Please Log in or Create an account to join the conversation.
- purged
- Offline
- New Member
-

- Posts: 8
- Thank you received: 1
In the meantime i think I got a better overview in Twincat, so that I could finally find the COE Startup SDOs which were used in the config xml file.
Hi Guys, I am stuck in a similar situation, may I chime in?
I am trying to have LinuxCNC talk to ESTUN ProNet Plus series servo drives via linuxcnc-ethercat->Beckhoff EK1100->Beckhoff EL6751.
There is a CANopen manual from the manufacturer so I have high hopes of getting that to work: www.estuneurope.eu/wp-content/uploads/20...anual_compressed.pdf
I have set up TwinCAT on a separate windows machine and I can scan and find all Beckhoff devices automatically. It finds 'special device' EL6751 and asks for baud rate which I set to 500k, the same which I have configured my servo drives to. TwinCAT then 'scans Fieldbus' which takes 30 - 40 seconds or so, but it doesn't discover my servo drives. Is that normal or is my cabling faulty? I've seen in a Nanotec application note that their CANopen devices can be discovered automatically ( en.nanotec.com/fileadmin/files/Applicati.../TwinCAT/TwinCAT.pdf )
On the other hand I have all the PDO data and everything in the CANopen manual so I could set up the devices all manually. How do I generate the ethercat-conf.xml (i.e. github.com/sittner/linuxcnc-ethercat/blo...ex/ethercat-conf.xml ) in TwinCAT then?
Thank you very much
Please Log in or Create an account to join the conversation.
- chimeno
- Offline
- Elite Member
-
- Posts: 295
- Thank you received: 125
Of course you can intervene, there are several people from the forum also caught in this module, I do not have EL6751 and it is difficult for me to help, if you are lucky and find a solution.Hi Guys, I am stuck in a similar situation, may I chime in?
Greeting
Chimeno
Please Log in or Create an account to join the conversation.
- Patis
-

- Offline
- New Member
-
- Posts: 2
- Thank you received: 0
I configure in my Drivesmapping-/configurationTool an easy Status- and Controlword mapping. Then I add a new node with the NodeID and add the same PDOS in Twincat3. If your setup is online... click on the refresh button in Twincat3 and check if your EL6751 is green(StateOP) and your Statusword must have any online Value.
If the Err LED is blink' red 1Hz... the NodeID is wrong or start with your Hardware or: You need a realtime capable Networkcard from Beckhoff or the network chip must be one of the supported chips from this Beckhoff site:
Beckhoff Link
I've this one:
Amazon Link
Another communication problem was:
Your EL6751 has an Hardware Version and a Firmware Version. Try to update this to the newest supported FirmwareVersion over Beckhoff Support. I find out... a lot of drives don't communicate under El6751 0000 0017 FW Version.
Creating the EtherCatXML for Linux is a nightmare, because I don't know how I can debug this. If SOMEONE has Tips for me give mee feedback. I'll create a new Post for my Problems with this XML Config file!!!
I wrote a dirty Lua Tool for that. You can find it in the attachments. Start it with Zerobrain
Have Fun Patis

Attachments:
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Ethercat with EL6751 CanOpen Master and JAT Servo Drives