Problems with Lichuan Ethercat servo drive
- LCR
- Offline
- Junior Member
-

Less
More
- Posts: 38
- Thank you received: 3
13 Mar 2025 13:59 #323840
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
havenofish , That is mm. It happens on Y and Z. I'm not playing with the Xx gantry axis at this point.
Darium, It is within the amplifier as far as I can see. LinuxCNC is sending the correct target position, and the machine is actually where it says it is, but it MAINTAINS a random (small) offset I can jog it around with the pendant and the offset stays the same. I can manually force the servo back and forth a bit, and it returns to the same incorrect position.
Darium, It is within the amplifier as far as I can see. LinuxCNC is sending the correct target position, and the machine is actually where it says it is, but it MAINTAINS a random (small) offset I can jog it around with the pendant and the offset stays the same. I can manually force the servo back and forth a bit, and it returns to the same incorrect position.
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-

Less
More
- Posts: 1014
- Thank you received: 285
13 Mar 2025 15:42 #323846
by ihavenofish
Replied by ihavenofish on topic Problems with Lichuan Ethercat servo drive
" I can manually force the servo back and forth a bit, and it returns to the same incorrect position."
ok, that's weird. hmm. time to contact lichuan and see how good their support is?
ok, that's weird. hmm. time to contact lichuan and see how good their support is?
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
13 Mar 2025 21:03 #323871
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
I changed all the gains to see if one would have an effect on the offset error. Nothing. I've put a light integration loop in the cia402.conf file. That solves the problem. I don't like it. I would appreciate hearing from anyone running these amps. If you have this issue or not. Thanks.
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-
Less
More
- Posts: 1014
- Thank you received: 285
13 Mar 2025 22:55 #323875
by ihavenofish
Replied by ihavenofish on topic Problems with Lichuan Ethercat servo drive
Interesting.
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
14 Mar 2025 18:07 #323947
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
I've sent an email. We'll see. If anyone has a contact, please let me know.
Please Log in or Create an account to join the conversation.
- ihavenofish
- Offline
- Platinum Member
-
Less
More
- Posts: 1014
- Thank you received: 285
14 Mar 2025 18:10 #323949
by ihavenofish
Replied by ihavenofish on topic Problems with Lichuan Ethercat servo drive
my only contact is the sales lady
Please Log in or Create an account to join the conversation.
- LCR
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 3
27 Mar 2025 14:54 #325067
by LCR
Replied by LCR on topic Problems with Lichuan Ethercat servo drive
Hi All
Does anyone have these drives jogging that can try some moves?
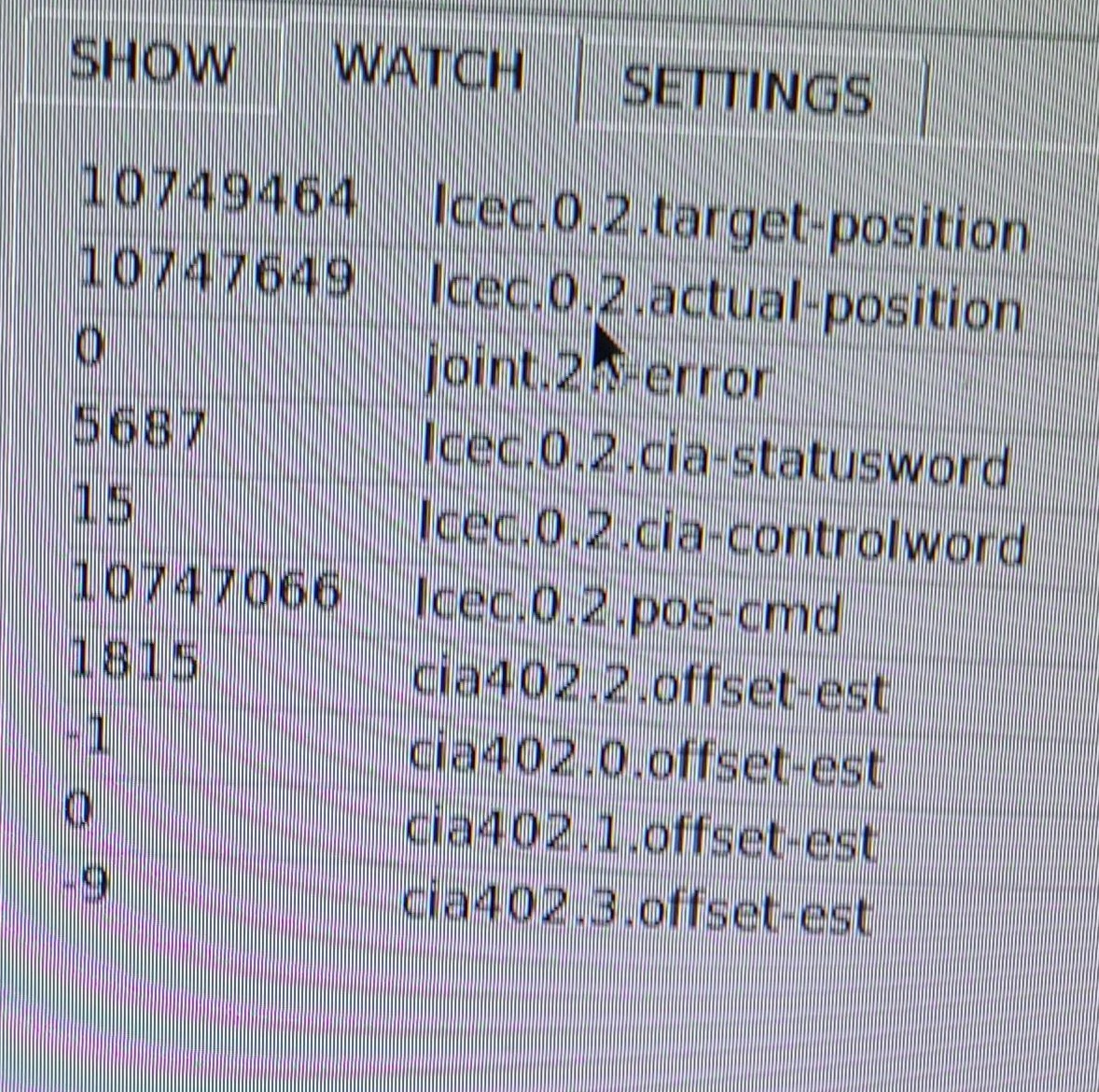
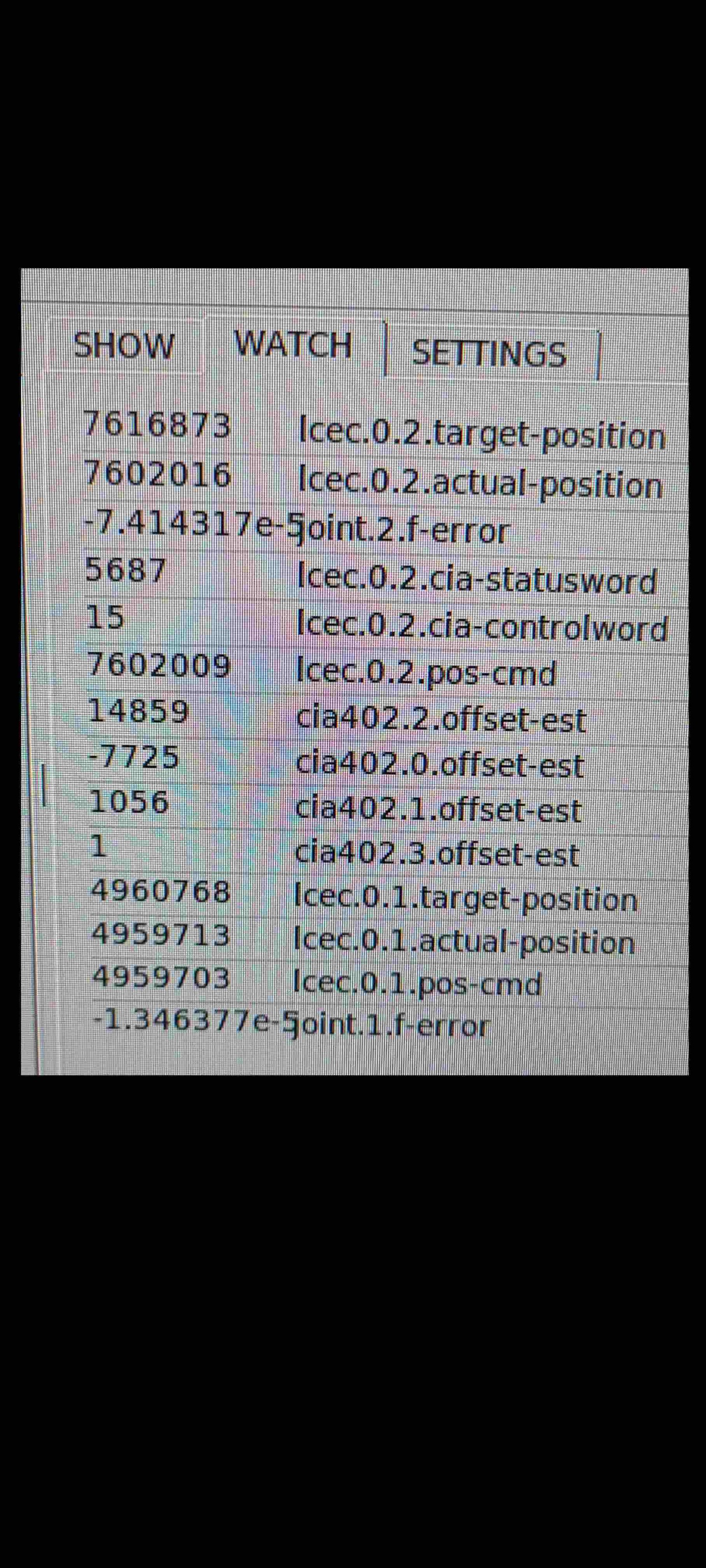
What I would like is if you would try some programmed moves back and forth while monitoring the target position (607A), the actual position (6064), the pos-cmd (60FC), the corresponding joint.X.f-error and show their values after a few (10) moves of whatever distance you can travel back and forth.
My issue is as follows:
I have 4 LC 10 E 1000 amplifier kits with 2500 RPM 17 bit motors, and they are all exhibiting the same following error issue.
I am running the servos in CSP mode at 1kHZ with LinuxCNC.
The issue I have is that the target position (607A) develops an offset and the actual position (6064) does not become equal. There is a random offset, which seems to grow over time. It can be thousands of counts. The motor actual position (6064) remains correct. The motor is counting correctly. I put a dial gauge at the end of travel, and the actual position (6064) is correct. To compensate for this, I put an integral loop in the machine controller. With this integral loop the machine moves correctly. When the controller software disables the drive power, and re-enables, the offset is gone. I have monitored the pos-cmd (60FC) and it follows the motor actual position (6064), until I disable and re-enable the drive. When I disable and re-enable the drive the pos-cmd (60FC) feedback value does not match either of the other 2 (6064) or (607A) however (6064) does now match (607A). The machine will then move to the correct position without requiring any integral compensation for a period, until the offset re-appears.
The offset between the target position (607A) and the actual position (6064) remains even if I jog the axis slightly, or if I manually force the servo out of position slightly. The servo wants to maintain the offset error. I have tried changing all of the gains to see if there is an effect on the error, and there is none.
Encoder Position Deviation P0B.15, always remains _0000. I would expect it to show the following error.
Position Deviation Counter P0B.53, always remains _0000. I would expect it to show the following error.
Input Position Command Count P0B.13 matches pos-cmd (60FC). It matches even when the target position (607A) and the actual position (6064) are different values.
The last fault shows as P0B.33 == 1, P0B.34 == 952 which is reverse over travel, which was from homing.
Actual motor speed P0B.55 does display values that change and seem correct.
The software version is: P01.50 ==> 03.16
Does anyone have these drives jogging that can try some moves?
What I would like is if you would try some programmed moves back and forth while monitoring the target position (607A), the actual position (6064), the pos-cmd (60FC), the corresponding joint.X.f-error and show their values after a few (10) moves of whatever distance you can travel back and forth.
My issue is as follows:
I have 4 LC 10 E 1000 amplifier kits with 2500 RPM 17 bit motors, and they are all exhibiting the same following error issue.
I am running the servos in CSP mode at 1kHZ with LinuxCNC.
The issue I have is that the target position (607A) develops an offset and the actual position (6064) does not become equal. There is a random offset, which seems to grow over time. It can be thousands of counts. The motor actual position (6064) remains correct. The motor is counting correctly. I put a dial gauge at the end of travel, and the actual position (6064) is correct. To compensate for this, I put an integral loop in the machine controller. With this integral loop the machine moves correctly. When the controller software disables the drive power, and re-enables, the offset is gone. I have monitored the pos-cmd (60FC) and it follows the motor actual position (6064), until I disable and re-enable the drive. When I disable and re-enable the drive the pos-cmd (60FC) feedback value does not match either of the other 2 (6064) or (607A) however (6064) does now match (607A). The machine will then move to the correct position without requiring any integral compensation for a period, until the offset re-appears.
The offset between the target position (607A) and the actual position (6064) remains even if I jog the axis slightly, or if I manually force the servo out of position slightly. The servo wants to maintain the offset error. I have tried changing all of the gains to see if there is an effect on the error, and there is none.
Encoder Position Deviation P0B.15, always remains _0000. I would expect it to show the following error.
Position Deviation Counter P0B.53, always remains _0000. I would expect it to show the following error.
Input Position Command Count P0B.13 matches pos-cmd (60FC). It matches even when the target position (607A) and the actual position (6064) are different values.
The last fault shows as P0B.33 == 1, P0B.34 == 952 which is reverse over travel, which was from homing.
Actual motor speed P0B.55 does display values that change and seem correct.
The software version is: P01.50 ==> 03.16
Attachments:
Please Log in or Create an account to join the conversation.
- PabloSancez
- Offline
- New Member
-

Less
More
- Posts: 4
- Thank you received: 4
30 Apr 2025 19:06 #327377
by PabloSancez
Replied by PabloSancez on topic Problems with Lichuan Ethercat servo drive
Hi! This is a lathe with Lichuan Ethercat and mesa 7i96s servodrivers for controlling the spindle with a mesa digital potentiometer mesa processes three encoders, one spindle and two linear for each axis, and it seems to work fine. I was even able to thread the G76 cycle.
I use absolute encoders how do I set up the machine so that the position of the machine is automatically read from the drivers when the machine is turned on?
I use absolute encoders how do I set up the machine so that the position of the machine is automatically read from the drivers when the machine is turned on?
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
Less
More
- Posts: 454
- Thank you received: 61
30 Apr 2025 20:20 #327383
by COFHAL
Replied by COFHAL on topic Problems with Lichuan Ethercat servo drive
I have those same servos, but the problem is that they don't measure correctly, and the circles turn out oval. How do I adjust the servos?
Please Log in or Create an account to join the conversation.
- PabloSancez
- Offline
- New Member
-
Less
More
- Posts: 4
- Thank you received: 4
18 May 2025 19:02 - 18 May 2025 19:05 #328710
by PabloSancez
Replied by PabloSancez on topic Problems with Lichuan Ethercat servo drive
Hi, I have finished the lathe with ethercat drivers. I'm posting my configuration. I am using a revolver head with asynchronous motor with carousel control. mesa reads the encoder and buttons. the machine is cast in steel.
youtube.com/shorts/veTGtAU7UrY
youtube.com/shorts/fbEU6qiVqMk
disk.yandex.ru/d/rNy3ErpcVfzkxw
youtube.com/shorts/veTGtAU7UrY
youtube.com/shorts/fbEU6qiVqMk
disk.yandex.ru/d/rNy3ErpcVfzkxw
Last edit: 18 May 2025 19:05 by PabloSancez.
The following user(s) said Thank You: tommylight, scotth, onceloved, Philip Lydin
Please Log in or Create an account to join the conversation.
Time to create page: 0.613 seconds