- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
- meister
- Offline
- Platinum Member
-

- Posts: 747
- Thank you received: 473
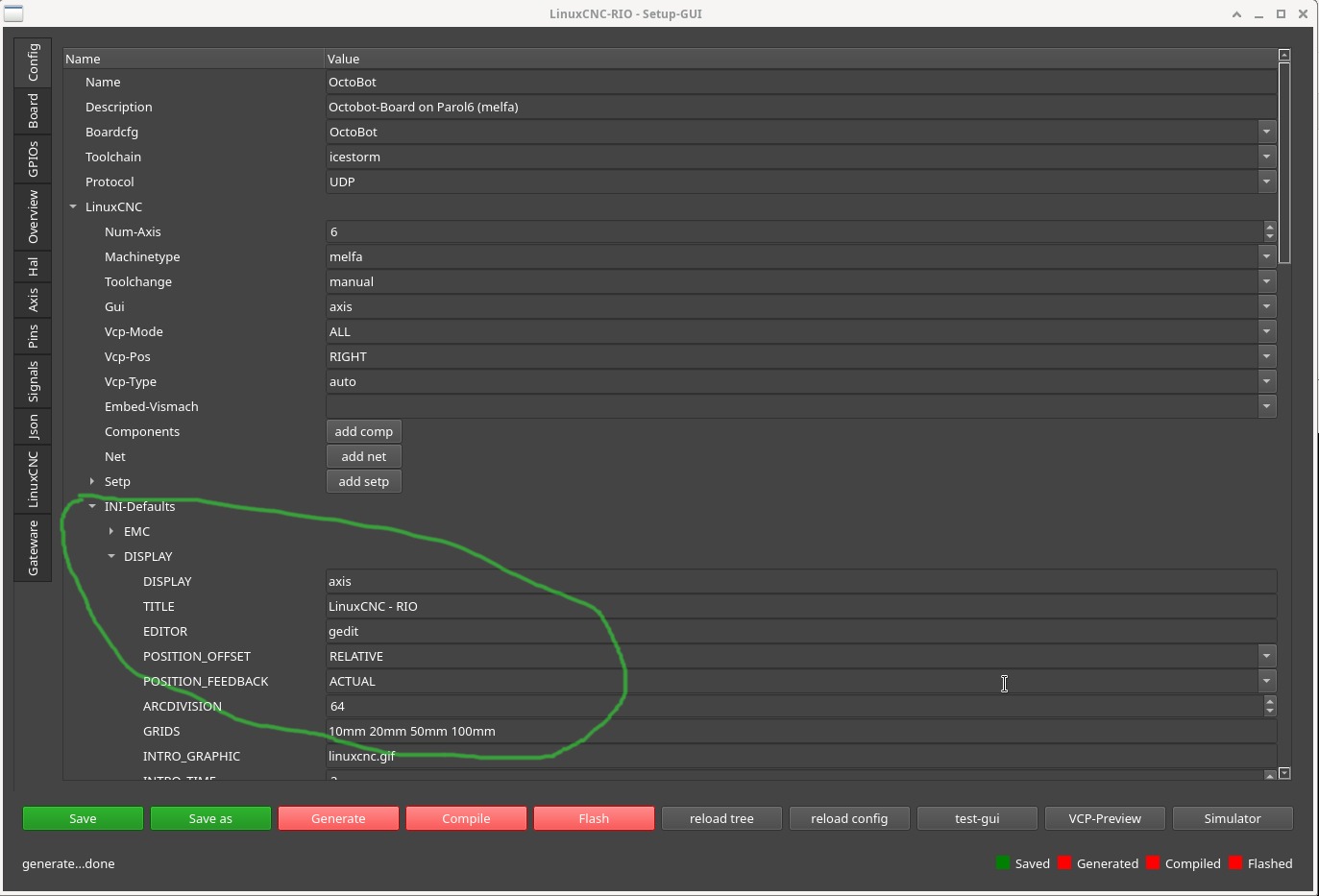
@mBender:
you can overwrite all ini parameters in the json config and also add MDI commands:
"linuxcnc": {
"gui": "axis",
"ini": {
"HALUI": {
"MDI_COMMAND|Go To Zero": "G0 X0 Y0",
"MDI_COMMAND||Gripper|0": "M68 E0 Q-100",
"MDI_COMMAND||Gripper|25": "M68 E0 Q-75",
"MDI_COMMAND||Gripper|50": "M68 E0 Q0",
"MDI_COMMAND||Gripper|75": "M68 E0 Q75",
"MDI_COMMAND||Gripper|100": "M68 E0 Q100"
},
"DISPLAY": {
"MAX_LINEAR_VELOCITY": 60.0,
"MAX_ANGULAR_VELOCITY": 60.0
}
},you can also add your own .hal file to postgui_call_list.hal (this entry will not be overwritten)
# cat Output/TangNano9K/LinuxCNC/postgui_call_list.hal
source custom_postgui.hal
source my-own.halabout the laptop/PC, try to reinstall the rio.c component:
sudo halcompile --install riocore/files/rio.cPlease Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
- Posts: 747
- Thank you received: 473
Attachments:
Please Log in or Create an account to join the conversation.
- epineh
- Offline
- Senior Member
-

- Posts: 76
- Thank you received: 27
I've had more electronic parts turn up today so I plan to get busy on the weekend and start testing Riosub over the next few weeks. I've got 4 and 6 axis closed loop controller boards ready to test, both with dual Modbus connections and shift register out, so I can trial multiple combinations... will keep you posted.
Cheers,
Russell.
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
- Posts: 747
- Thank you received: 473
www.youtube.com/shorts/jnna9jJnXfs
Modbus speed test:
www.youtube.com/shorts/ZcQjW4829R0
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-

- Posts: 133
- Thank you received: 15
It worked, problem was on the hadrware side. Another USB Hub did the trick.
[/code][/code][code]about the laptop/PC, try to reinstall the rio.c component: [code]sudo halcompile --install riocore/files/rio.c
Please Log in or Create an account to join the conversation.
- probotix
- Offline
- Senior Member
-
- Posts: 41
- Thank you received: 1
Where you at in Florida? How can I contact you?
JCLPCB delivered my self made PCB board. Testing ongoing. I had to order 5 boards. If anyone is interested in one, I have a few spares. Located in the Florida USA.
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-
- Posts: 133
- Thank you received: 15
Please Log in or Create an account to join the conversation.
- epineh
- Offline
- Senior Member
-
- Posts: 76
- Thank you received: 27
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
- Posts: 747
- Thank you received: 473
works !
Please Log in or Create an account to join the conversation.
- epineh
- Offline
- Senior Member
-
- Posts: 76
- Thank you received: 27
Cheers.
Russell.
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)