Guidance Needed! Initial LinuxCNC/PncConf setup
- Sray69
- Offline
- Elite Member
-

- Posts: 255
- Thank you received: 13
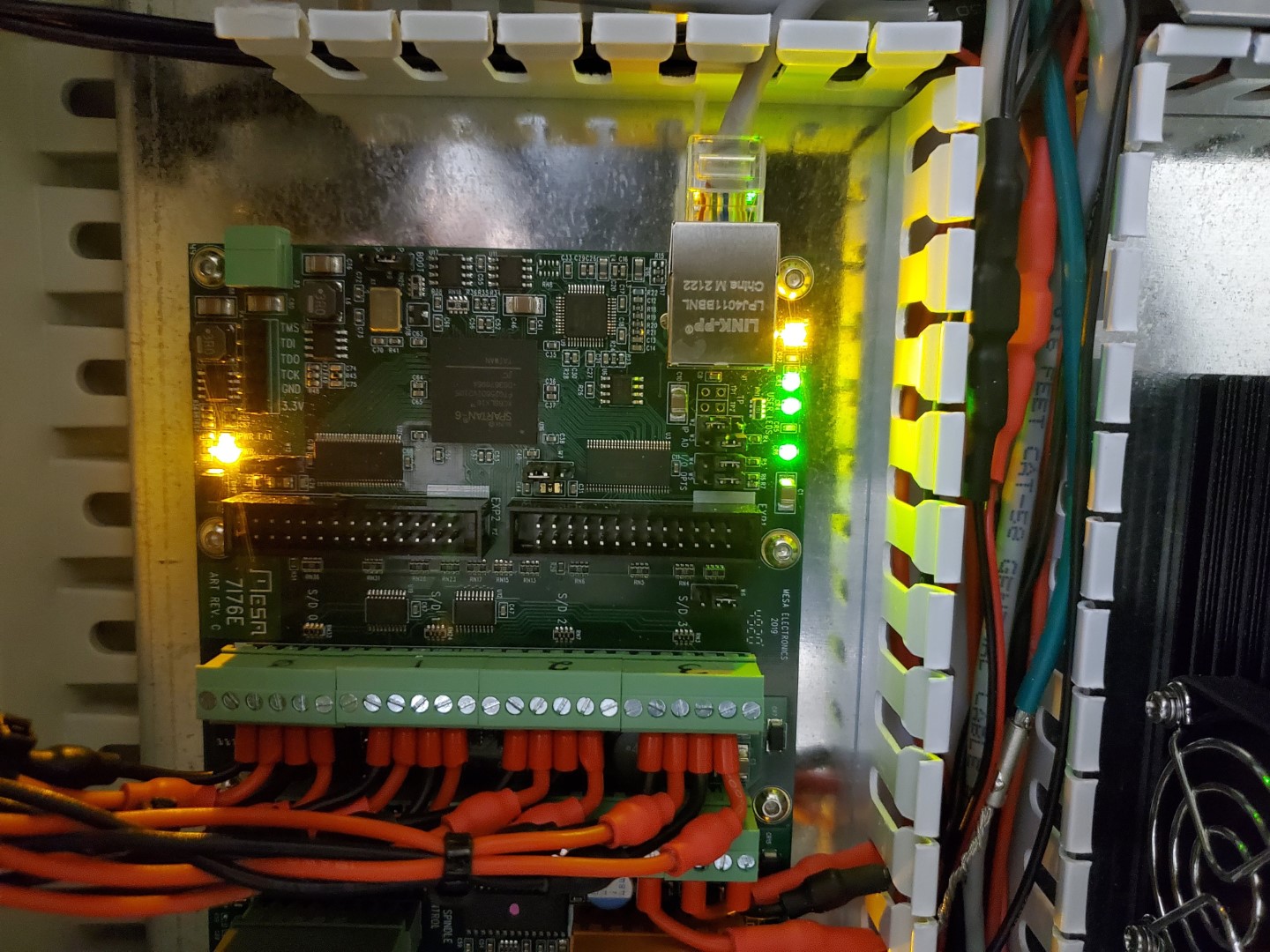
The first pic is while the motor is working.

This pic is after the motor stops and will not start again.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

- Posts: 17919
- Thank you received: 5247
Are you running LinuxCNC when this happens?
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
- Posts: 21635
- Thank you received: 7391
Please Log in or Create an account to join the conversation.
- Sray69
- Offline
- Elite Member
-
- Posts: 255
- Thank you received: 13
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
- Posts: 17919
- Thank you received: 5247
What hardware do you have and what servo thread rate?
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
- Posts: 21635
- Thank you received: 7391
When running LinuxCNC and light goes orange, does LinuxCNC post a warning that the link has been dropped or watchdog has bitten?It comes on when running both pncconf and linuxcnc.
Please Log in or Create an account to join the conversation.
- Sray69
- Offline
- Elite Member
-
- Posts: 255
- Thank you received: 13
Debian Bookworm
LCNC 2.9
Mesa 7i76e
X&Y Stepper Motors - Nema 24
Z Stepper Motor - Nema 23
Digital Stepper Driver - DM860T
Axis (3 axis) configuration - XYYZ (I only have limit switches on one of the Y axis's)
I messed around with the timings and am currently using
Step On-Time: 5000
Step Space: 5000
Direction Hold: 5000
Direction Setup: 8000
I have looked through the manual for the DM860T drivers and it says > 2.5 microseconds for steps and > 5 microseconds for direction. Just not sure what the sweet spot is. I am just trying to get all axis's moving manually before I start fine tuning.
Please Log in or Create an account to join the conversation.
- Sray69
- Offline
- Elite Member
-
- Posts: 255
- Thank you received: 13
When the drives would stop working I noticed the amber light was on (as shown above).Sometimes when I go into the Test/Tune Axis screens (in PncConf) I can get the axis to move using the +/- buttons on the Tune window. Other times the motor will not do anything. Even if I close the test windows and then go back in they will not work. Sometimes if I go back to the Mesa Card Configuration Page and "Accept Component Changes" and then go into the Test screens it may work or may not. Sometimes when I press the Run button it will cycle back and forth non-stop and other times it will just stop after a couple cycles and I cannot get it to start again. Very inconsistent.
I was advised to just save the config and open it in LCNC and go to Machine>Calibration and fine tune my settings. Then click "Test", then "OK", then "Save to File"
When I say it happens in LCNC as well, I mean while testing the ini/hal files that pncconf created. As suggested I loaded the config in LCNC and then went to Machine>Calibration and then I clicked "Test". I could not get any axis to move at all in LCNC. Then I noticed the amber light was on just as in PncConf when the drives would stop working.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
- Posts: 17919
- Thank you received: 5247
The /INIT light being illuminated while LinuxCNC is running
indicates a watchdog bite which in turn means that the host
computer has lost contact with the 7I76E.
The most likely cause is real time issues on the host computer,
which is why I asked what the host computer hardware was, what the servo
thread rate was and what OS was used.
Please Log in or Create an account to join the conversation.
- Sray69
- Offline
- Elite Member
-
- Posts: 255
- Thank you received: 13
MB: ASUS M5A78L-M/USB3
CPU: AMD FX-6300 Six-core Processor 3.5 GHz
RAM: 8GB DDR3-1600 (800MHz clock) PC3-12800
OS: Debian 12 Bookworm

I did see this error this morning while testing again. Not sure what it means though.

Where do I find the servo thread rate?
Thanks
Attachments:
Please Log in or Create an account to join the conversation.