- International LinuxCNC Users
- Deutsch
- Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
- wicki
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 183
- Thank you received: 21
23 Feb 2019 08:22 #126991
by wicki
Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto was created by wicki
Hi zusammen,
die Treiber sind noch nicht fertig - aber in einem testfaehigen Zustand.
Wer das mal ausprobieren moechte:
erste.de/ethraw/readme.de.html
Und wie gesagt: feedback waere nicht schlecht.....
die Treiber sind noch nicht fertig - aber in einem testfaehigen Zustand.
Wer das mal ausprobieren moechte:
erste.de/ethraw/readme.de.html
Und wie gesagt: feedback waere nicht schlecht.....
The following user(s) said Thank You: tommylight, Tchefter
Please Log in or Create an account to join the conversation.
- pl7i92
-

- Offline
- Platinum Member
-

Less
More
- Posts: 1872
- Thank you received: 358
23 Feb 2019 11:38 #126996
by pl7i92
Replied by pl7i92 on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Warumm das ausprobieren wenn ich mit dem
Mach3 5Axis board
über 20m/min komme
und der arduino bei 4,/min schlapp macht
bei 800Schritte /mm
nur weil ich dann 8Core processor boards betreiben kann
anstatt für 25Euro eien eigene PC der Maschine zu gönnen
OK es Geht mehr
Wlan CNC aber nur die wenigsten wollen das
und hier bei Linuxcnc sind meistens nur dioe mit den Riesenmaschinen
und da zählt Sichere Kommunikation alles#
Mach3 5Axis board
über 20m/min komme
und der arduino bei 4,/min schlapp macht
bei 800Schritte /mm
nur weil ich dann 8Core processor boards betreiben kann
anstatt für 25Euro eien eigene PC der Maschine zu gönnen
OK es Geht mehr
Wlan CNC aber nur die wenigsten wollen das
und hier bei Linuxcnc sind meistens nur dioe mit den Riesenmaschinen
und da zählt Sichere Kommunikation alles#
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21734
- Thank you received: 7425
23 Feb 2019 12:17 #127001
by tommylight
Replied by tommylight on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
@Wicki
Danke, das ist noch ein mehr feature des Linuxcnc.
Danke, das ist noch ein mehr feature des Linuxcnc.
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
23 Feb 2019 12:43 #127003
by wicki
weil man vielleicht keine kommerz-software benutzen will?
weil man windows nicht mag?
weil einem linuxcnc besser gefaellt?
weil man kein motherboard mit parport hat?
mir fallen noch weitere gruende ein, wenn ich nachdenke.
es wird ja keiner gezwungen, das zu probieren.....
ich wollte wissen was da mit welcher hardware und ethernet fuer kleines
geld moeglich ist.
und ich glaube, wenn der treiber erst mal laeuft (was er ja jetzt tut), dann ist
es eine leichte uebung fuer arduino oder raspberry den job der step-generierung
nebenbei zu machen.
denn das ist ja das einzige _wirklich_ zeitkritische problem.
wobei da ja auch nur der jitter kritisch ist. ob motorsteps jetzt insgesamt
mit 100 oder 500usc. laufzeit unterwegs sind ist nicht so
tragisch - wuerde ich sagen.
wie laeuft das bei den mesa-karten? brauchen die zwingend servos?
oder haben die eigene step-generatoren?
(ich hab noch nie eine in den fingern gehabt)
Replied by wicki on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Warumm das ausprobieren wenn ich mit dem
Mach3 5Axis board über 20m/min komme
weil man vielleicht keine kommerz-software benutzen will?
weil man windows nicht mag?
weil einem linuxcnc besser gefaellt?
weil man kein motherboard mit parport hat?
mir fallen noch weitere gruende ein, wenn ich nachdenke.
es wird ja keiner gezwungen, das zu probieren.....
ich wollte wissen was da mit welcher hardware und ethernet fuer kleines
geld moeglich ist.
und ich glaube, wenn der treiber erst mal laeuft (was er ja jetzt tut), dann ist
es eine leichte uebung fuer arduino oder raspberry den job der step-generierung
nebenbei zu machen.
denn das ist ja das einzige _wirklich_ zeitkritische problem.
wobei da ja auch nur der jitter kritisch ist. ob motorsteps jetzt insgesamt
mit 100 oder 500usc. laufzeit unterwegs sind ist nicht so
tragisch - wuerde ich sagen.
wie laeuft das bei den mesa-karten? brauchen die zwingend servos?
oder haben die eigene step-generatoren?
(ich hab noch nie eine in den fingern gehabt)
Please Log in or Create an account to join the conversation.
- pl7i92
-
- Offline
- Platinum Member
-
Less
More
- Posts: 1872
- Thank you received: 358
23 Feb 2019 14:58 #127006
by pl7i92
Replied by pl7i92 on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Grundsätzlich hast du recht !
Mesa Kann auch step dir die haben einen span6/7 an board
die Mesa arbeiten mit 3x 16mhz spi
die sich gegenseitig kontrollieren und linuxcnc rückmenden 1us sicherheit
Die befehle der Hal werden in echtzeit 3x an das board gespiegelt und quitiert
Mesa Kann auch step dir die haben einen span6/7 an board
die Mesa arbeiten mit 3x 16mhz spi
die sich gegenseitig kontrollieren und linuxcnc rückmenden 1us sicherheit
Die befehle der Hal werden in echtzeit 3x an das board gespiegelt und quitiert
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
23 Feb 2019 15:37 #127010
by wicki
rein rechnerisch muesste das dann mit 100M-ethernet auch realisierbar sein.
der arduino ist sehr gemaechlich beim verarbeiten. raspberry um einiges
schneller.
aber ich teste jetzt erst mal mit dem arduino weiter.
(da kann man auch besser zuguggen)")
eine idee hatte ich noch dazu:
wenn man dem stepgen sagt, er soll nicht
___I==I___
als einen pulse ausgeben, sondern raspberry/arduino machen aus jeder _flanke_
selbst einen puls mit .steplen impulsbreite, dann haette man die maximalfreqenz
am motor doch praktisch verdoppelt - ohne auf genauigkeit zu verzichten.
hab ich recht?
dann waere der status H/L des stepper-pins zwar undefiniert - das ist aber ja egal,
weil der empfaenger automatisch einen korrekten puls draus macht, sobald der
pegel wechselt.
Replied by wicki on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Mesa Kann auch step dir die haben einen span6/7 an board
die Mesa arbeiten mit 3x 16mhz spi
rein rechnerisch muesste das dann mit 100M-ethernet auch realisierbar sein.
der arduino ist sehr gemaechlich beim verarbeiten. raspberry um einiges
schneller.
aber ich teste jetzt erst mal mit dem arduino weiter.
(da kann man auch besser zuguggen)
eine idee hatte ich noch dazu:
wenn man dem stepgen sagt, er soll nicht
___I==I___
als einen pulse ausgeben, sondern raspberry/arduino machen aus jeder _flanke_
selbst einen puls mit .steplen impulsbreite, dann haette man die maximalfreqenz
am motor doch praktisch verdoppelt - ohne auf genauigkeit zu verzichten.
hab ich recht?
dann waere der status H/L des stepper-pins zwar undefiniert - das ist aber ja egal,
weil der empfaenger automatisch einen korrekten puls draus macht, sobald der
pegel wechselt.
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
23 Feb 2019 19:08 #127013
by wicki
Replied by wicki on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Frustrierenderweise ist aber beim Arduino tatsaechlich bei rund 1ms Zykuszeit
Schluss.
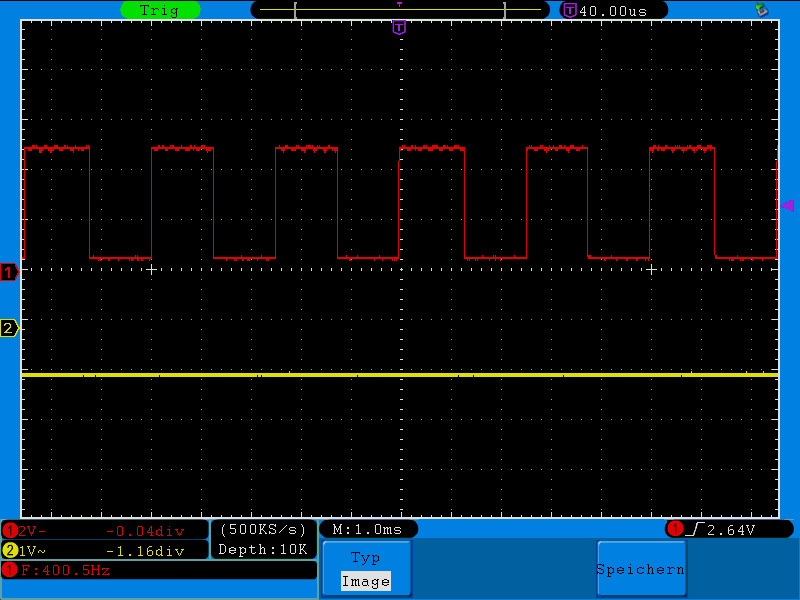
Bei schnellerer Paketfolge verschluckt er sich.
Man wird sicherlich am Treiber noch was optimieren koennen.
Aber wenn nicht die w5100-lib des Arduino einen fetten Bug hat,
dann wird man damit auch nur ein paar % mehr heraus holen koennen.
Schluss.
Bei schnellerer Paketfolge verschluckt er sich.
Man wird sicherlich am Treiber noch was optimieren koennen.
Aber wenn nicht die w5100-lib des Arduino einen fetten Bug hat,
dann wird man damit auch nur ein paar % mehr heraus holen koennen.
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
23 Feb 2019 20:04 #127018
by wicki
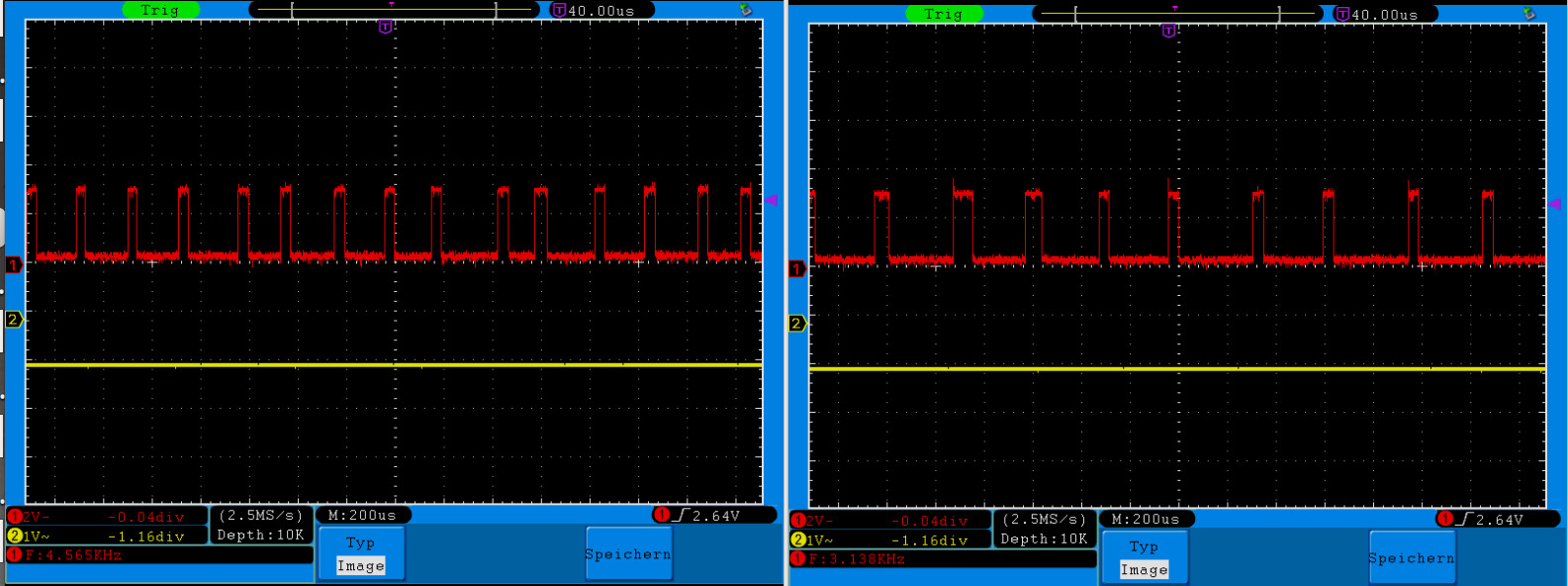
Gleicher Aufbau mit Raspberry
Bis knapp ueber 5 kHz ist das Signal stabil.
Er verbraucht dafuer eine Sendebandbreite, die nur 1/3 von dem betraegt,
was man in einem Thread pro Sekunde uebertragen kann.
Nimmt man also einen schnelleren Empfaenger, kann man sicher 10kHz erreichen,
schaetze ich.
Und weder auf Sende- noch auf Empfangsseite ist irgendwas optimiert. Da geht
ich auch noch was....
Meine Motoren gegen im uebrigen bereits bei deutlich unter 5kHz den Loeffel ab
Replied by wicki on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Gleicher Aufbau mit Raspberry
Bis knapp ueber 5 kHz ist das Signal stabil.
Er verbraucht dafuer eine Sendebandbreite, die nur 1/3 von dem betraegt,
was man in einem Thread pro Sekunde uebertragen kann.
Nimmt man also einen schnelleren Empfaenger, kann man sicher 10kHz erreichen,
schaetze ich.
Und weder auf Sende- noch auf Empfangsseite ist irgendwas optimiert. Da geht
ich auch noch was....
Meine Motoren gegen im uebrigen bereits bei deutlich unter 5kHz den Loeffel ab
Please Log in or Create an account to join the conversation.
- Mike_Eitel
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1052
- Thank you received: 183
23 Feb 2019 20:58 #127020
by Mike_Eitel
Replied by Mike_Eitel on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Grüess Dich wicki
Ehrlich gesagt. Ich würde das nie für eine "richtige Fräse" nutzen, aber ich finde Deine Bemühungen trotzdem gut und interessant! Mach weiter so.
Zwei Themenkreise:
1. EMV
Damit das Dein Arduino/Pi am I/O Signale hat hast Du nur die halbe Miete. Die müssen dann noch störsicher sein. Da steckt z. B. bei den, auch von mir, gern genutzten MESA Karten Know How drin.
2. Jitter
Sehr oft wird der Jitter auf Stepper, wie er besonders bei SW Generation vorhanden ist, unterschätzt. Dieser Phasensprung = Jitter wird mit grössere Drehzahl immer störender. Deswegen "spielen" Steppper an fpga Generatoren ruhiger.
m5c
Mike
Ehrlich gesagt. Ich würde das nie für eine "richtige Fräse" nutzen, aber ich finde Deine Bemühungen trotzdem gut und interessant! Mach weiter so.
Zwei Themenkreise:
1. EMV
Damit das Dein Arduino/Pi am I/O Signale hat hast Du nur die halbe Miete. Die müssen dann noch störsicher sein. Da steckt z. B. bei den, auch von mir, gern genutzten MESA Karten Know How drin.
2. Jitter
Sehr oft wird der Jitter auf Stepper, wie er besonders bei SW Generation vorhanden ist, unterschätzt. Dieser Phasensprung = Jitter wird mit grössere Drehzahl immer störender. Deswegen "spielen" Steppper an fpga Generatoren ruhiger.
m5c
Mike
Please Log in or Create an account to join the conversation.
- wicki
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 183
- Thank you received: 21
24 Feb 2019 00:08 #127028
by wicki
ja, in der tat.
das sehe ich auch so.
mal schaun, ob mir dazu noch was einfaellt.
ein paar ideen hab ich noch
die stoersicherheit sollte auch machbar sein. zumindest so, dass es bei
lost-packets einen not-halt gibt.
mehr ist eh nicht drin, weil ein re-send ja das timing kaputt machen wuerde.
Replied by wicki on topic Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Sehr oft wird der Jitter auf Stepper, wie er besonders bei SW Generation vorhanden ist, unterschätzt.
ja, in der tat.
das sehe ich auch so.
mal schaun, ob mir dazu noch was einfaellt.
ein paar ideen hab ich noch
die stoersicherheit sollte auch machbar sein. zumindest so, dass es bei
lost-packets einen not-halt gibt.
mehr ist eh nicht drin, weil ein re-send ja das timing kaputt machen wuerde.
Please Log in or Create an account to join the conversation.
Moderators: Muecke
- International LinuxCNC Users
- Deutsch
- Mal wieder: Arduino und Rapsberry als Treiber-Boards - Deutsches Howto
Time to create page: 0.271 seconds