7i95 Einrichten mit Tool
- strahlensauger
-

- Offline
- Elite Member
-

- Posts: 195
- Thank you received: 66
Du musst folgendes im Terminal ausführen:
cd
mkdir linuxcnc
cd linuxcnc
mkdir configs
cd configs
mkdir 7i97
cd 7i95
in das Verzeichnis musst du die Dateien kopieren
dort kannst du linuxcnc starten mit
linuxcnc 7i95.ini
dann sollte entweder axis starten oder zumindest einige Fehlermeldungen auftauchen.
Natürlich sollten die Stepper und die Mesakarte angeschlossen und angeschaltet sein.
Dann sehen wir weiter.
Please Log in or Create an account to join the conversation.
- Muecke
-
 Topic Author
Topic Author
- Offline
- Moderator
-

- Posts: 886
- Thank you received: 93
Das Verzeichnis habe ich angelegt (im Terminal) und alle Daten dorthin herunter geladen.
1) LinuxCNC gestartet
2) Auswahl der Konfiguration 7i79
3) Fehlermeldung, LinuxCNC hat sich beendet
Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl:
Print file information:
RUN_IN_PLACE=no
LINUXCNC_DIR=
LINUXCNC_BIN_DIR=/usr/bin
LINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcnc
LINUXCNC_SCRIPT_DIR=
LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modules
LINUXCNC_CONFIG_DIR=
LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgs
INIVAR=inivar
HALCMD=halcmd
LINUXCNC_EMCSH=/usr/bin/wish8.6
LINUXCNC - 2.8.2-11-g6a3d0a434
Machine configuration directory is '/home/cnc/linuxcnc/configs/7i95'
Machine configuration file is '7i95.ini'
INIFILE=/home/cnc/linuxcnc/configs/7i95/7i95.ini
VERSION=1.1
PARAMETER_FILE=linuxcnc.var
TASK=milltask
HALUI=halui
DISPLAY=axis
COORDINATES=XYZ
KINEMATICS=trivkins coordinates=XYZ
Starting LinuxCNC...
Starting LinuxCNC server program: linuxcncsvr
Loading Real Time OS, RTAPI, and HAL_LIB modules
Starting LinuxCNC IO program: io
emc/iotask/ioControl.cc 702: can't load tool table.
Starting HAL User Interface program: halui
Found file(REL): ./7i95.hal
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 192.168.1.121: INFO: Hardware address (MAC): 00:60:1b:15:00:a7
hm2_eth: discovered 7I95
hm2/hm2_7i95.0: Low Level init 0.15
hm2/hm2_7i95.0: Smart Serial Firmware Version 43
hm2/hm2_7i95.0: 58 I/O Pins used:
hm2/hm2_7i95.0: IO Pin 000 (TB3-02/TB3-03): StepGen #0, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 001 (TB3-04/TB3-05): StepGen #0, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 002 (TB3-08/TB3-09): StepGen #1, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 003 (TB3-10/TB3-11): StepGen #1, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 004 (TB3-14/TB3-15): StepGen #2, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 005 (TB3-16/TB3-17): StepGen #2, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 006 (TB3-20/TB3-21): StepGen #3, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 007 (TB3-22/TB3-23): StepGen #3, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 008 (TB4-02/TB4-03): StepGen #4, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 009 (TB4-04/TB4-05): StepGen #4, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 010 (TB4-08/TB4-09): IOPort
hm2/hm2_7i95.0: IO Pin 011 (TB4-10/TB4-11): IOPort
hm2/hm2_7i95.0: IO Pin 012 (TB4-14/TB4-15): IOPort
hm2/hm2_7i95.0: IO Pin 013 (TB4-16/TB4-17): IOPort
hm2/hm2_7i95.0: IO Pin 014 (TB3-16/TB3-17): IOPort
hm2/hm2_7i95.0: IO Pin 015 (TB4-20/TB4-21): IOPort
hm2/hm2_7i95.0: IO Pin 016 (TB4-22/TB4-23): IOPort
hm2/hm2_7i95.0: IO Pin 017 (TB4-22/TB4-23): IOPort
hm2/hm2_7i95.0: IO Pin 018 (TB1-01/TB1-09): Muxed Encoder #0, pin Muxed A (Input)
hm2/hm2_7i95.0: IO Pin 019 (TB1-04/TB1-12): Muxed Encoder #0, pin Muxed B (Input)
hm2/hm2_7i95.0: IO Pin 020 (TB1-07/TB1-15): Muxed Encoder #0, pin Muxed Index (Input)
hm2/hm2_7i95.0: IO Pin 021 (TB1-17/TB2-01): IOPort
hm2/hm2_7i95.0: IO Pin 022 (TB1-20/TB2-04): IOPort
hm2/hm2_7i95.0: IO Pin 023 (TB1-23/TB2-07): IOPort
hm2/hm2_7i95.0: IO Pin 024 (TB2-09/TB2-17): IOPort
hm2/hm2_7i95.0: IO Pin 025 (TB2-12/TB2-20): IOPort
hm2/hm2_7i95.0: IO Pin 026 (TB2-15/TB2-23): IOPort
hm2/hm2_7i95.0: IO Pin 027 (Internal EncMux): Muxed Encoder Select #0, pin Mux Select 0 (Output)
hm2/hm2_7i95.0: IO Pin 028 (Internal InMux0): InMux Input Mux #0, pin addr0 (Output)
hm2/hm2_7i95.0: IO Pin 029 (Internal InMux1): InMux Input Mux #0, pin addr1 (Output)
hm2/hm2_7i95.0: IO Pin 030 (Internal InMux2): InMux Input Mux #0, pin addr2 (Output)
hm2/hm2_7i95.0: IO Pin 031 (Internal InMux3): InMux Input Mux #0, pin addr3 (Output)
hm2/hm2_7i95.0: IO Pin 032 (Internal InMux4): InMux Input Mux #0, pin addr4 (Output)
hm2/hm2_7i95.0: IO Pin 033 (Internal InMuxData): InMux Input Mux #0, pin muxdata (Input)
hm2/hm2_7i95.0: IO Pin 034 (TB5-13/TB5-14): SSR #0, pin Out-00 (Output)
hm2/hm2_7i95.0: IO Pin 035 (TB5-15/TB5-16): SSR #0, pin Out-01 (Output)
hm2/hm2_7i95.0: IO Pin 036 (TB5-17/TB5-18): SSR #0, pin Out-02 (Output)
hm2/hm2_7i95.0: IO Pin 037 (TB5-19/TB5-20): SSR #0, pin Out-03 (Output)
hm2/hm2_7i95.0: IO Pin 038 (TB5-21/TB5-22): SSR #0, pin Out-04 (Output)
hm2/hm2_7i95.0: IO Pin 039 (TB5-23/TB5-24): SSR #0, pin Out-05 (Output)
hm2/hm2_7i95.0: IO Pin 040 (internal): SSR #0, pin AC Ref (internal) (Output)
hm2/hm2_7i95.0: IO Pin 041 (P1-01): IOPort
hm2/hm2_7i95.0: IO Pin 042 (P1-02): IOPort
hm2/hm2_7i95.0: IO Pin 043 (P1-03): IOPort
hm2/hm2_7i95.0: IO Pin 044 (P1-04): IOPort
hm2/hm2_7i95.0: IO Pin 045 (P1-05): IOPort
hm2/hm2_7i95.0: IO Pin 046 (P1-06): IOPort
hm2/hm2_7i95.0: IO Pin 047 (P1-07): IOPort
hm2/hm2_7i95.0: IO Pin 048 (P1-08): IOPort
hm2/hm2_7i95.0: IO Pin 049 (P1-09): IOPort
hm2/hm2_7i95.0: IO Pin 050 (P1-11): IOPort
hm2/hm2_7i95.0: IO Pin 051 (P1-13): IOPort
hm2/hm2_7i95.0: IO Pin 052 (P1-15): IOPort
hm2/hm2_7i95.0: IO Pin 053 (P1-17): IOPort
hm2/hm2_7i95.0: IO Pin 054 (P1-19): IOPort
hm2/hm2_7i95.0: IO Pin 055 (P1-21): IOPort
hm2/hm2_7i95.0: IO Pin 056 (P1-23): IOPort
hmFound file(REL): ./custom.hal
Starting TASK program: milltask
Starting DISPLAY program: axis
No option 'tto_g11' in section: 'DEFAULT'
No option 'show_program' in section: 'DEFAULT'
No option 'show_rapids' in section: 'DEFAULT'
No option 'program_alpha' in section: 'DEFAULT'
No option 'show_live_plot' in section: 'DEFAULT'
No option 'show_tool' in section: 'DEFAULT'
No option 'show_extents' in section: 'DEFAULT'
No option 'show_offsets' in section: 'DEFAULT'
No option 'grid_size' in section: 'DEFAULT'
No option 'show_machine_limits' in section: 'DEFAULT'
No option 'show_machine_speed' in section: 'DEFAULT'
No option 'show_distance_to_go' in section: 'DEFAULT'
No option 'dro_large_font' in section: 'DEFAULT'
No option 'block_delete' in section: 'DEFAULT'
No option 'optional_stop' in section: 'DEFAULT'
No option 'recentfiles' in section: 'DEFAULT'
Shutting down and cleaning up LinuxCNC...
Running HAL shutdown script
task: 79 cycles, min=0.000025, max=0.013220, avg=0.008250, 0 latency excursions (> 10x expected cycle time of 0.010000s)
2/hm2_7i95.0: IO Pin 057 (P1-25): IOPort
hm2/hm2_7i95.0: registered
hm2_eth: in hm2_eth_reset
hm2_eth: HostMot2 ethernet driver unloaded
hm2: unloading
Removing HAL_LIB, RTAPI, and Real Time OS modules
Removing NML shared memory segments
Debug file information:
cannot gain I/O privileges - forgot 'sudo make setuid'?
Note: Using POSIX non-realtime
link (updating variable file): Datei oder Verzeichnis nicht gefunden
note: MAXV max: 100.000 units/sec 6000.000 units/min
note: LJOG max: 100.000 units/sec 6000.000 units/min
note: LJOG default: 50.000 units/sec 3000.000 units/min
note: jog_order='XYZ'
note: jog_invert=set([])
Could not open command file 'postgui_call_list.hal'
5438
5484
Stopping realtime threads
Unloading hal components
cannot gain I/O privileges - forgot 'sudo make setuid'?
Note: Using POSIX non-realtime
Info report created by linuxcnc_info:
The file: /tmp/linuxcnc_info.txt
can be posted to a forum or a web site like:
pastebin.com
in order to provide information about the linuxcnc
system and configuration.
Date: Mi 23. Mär 09:47:42 CET 2022
UTC Date: Mi 23. Mär 08:47:42 UTC 2022
this program: /usr/bin/linuxcnc_info
uptime: 09:47:42 up 2 days, 22:22, 1 user, load average: 0,27, 0,26, 0,30
lsb_release -sa: Debian Debian GNU/Linux 10 (buster) 10 buster
which linuxcnc: /usr/bin/linuxcnc
pwd: /home/cnc/linuxcnc/configs/7i95
USER: cnc
LOGNAME: cnc
HOME: /home/cnc
EDITOR:
VISUAL:
LANGUAGE:
TERM: dumb
COLORTERM:
DISPLAY: :0.0
DESKTOP: xfce
display size: 1920x1080 pixels (508x285 millimeters)
PATH: /usr/bin:/home/cnc/linuxcnc/configs/7i95/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games
uname items:
nodename -n: CNC
kernel-name -s: Linux
kernel-vers -v: #1 SMP PREEMPT RT Debian 4.19.232-1 (2022-03-07)
machine -m: x86_64
processor -p: unknown
platform -i: unknown
oper system -o: GNU/Linux
/proc items:
cmdline: BOOT_IMAGE=/boot/vmlinuz-4.19.0-19-rt-amd64 root=UUID=eed6681a-1711-4683-9106-cbaa7298d14c ro quiet
model name: Intel(R) Core(TM) i3-6100 CPU @ 3.70GHz
cores: 2
cpu MHz: 899.999
parport:
serial:
Versions:
gcc: gcc (Debian 8.3.0-6) 8.3.0
python: Python 2.7.16
git: not_in_PATH
git commit: NA
tcl: 8.6
tk: 8.6
glade: not_in_PATH
glade-gtk2: not_in_PATH
linuxcnc_var all:
LINUXCNCVERSION: 2.8.2-11-g6a3d0a434
LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcp
LINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples
REALTIME: /etc/init.d/realtime
RTS: uspace
HALLIB_DIR: /usr/share/linuxcnc/hallib
dpkg -l '*linuxcnc*':
Gewünscht=Unbekannt/Installieren/R=Entfernen/P=Vollständig Löschen/Halten
| Status=Nicht/Installiert/Config/U=Entpackt/halb konFiguriert/
Halb installiert/Trigger erWartet/Trigger anhängig
|/ Fehler?=(kein)/R=Neuinstallation notwendig (Status, Fehler: GROSS=schlecht)
||/ Name Version Architektur Beschreibung
+++-===================-=====================-============-=====================================================================
un linuxcnc <keine> <keine> (keine Beschreibung vorhanden)
un linuxcnc-dev <keine> <keine> (keine Beschreibung vorhanden)
un linuxcnc-doc <keine> <keine> (keine Beschreibung vorhanden)
ii linuxcnc-doc-en 1:2.8.2.11.g6a3d0a434 all motion controller for CNC machines and robots (English documentation)
ii linuxcnc-doc-es 1:2.8.2.11.g6a3d0a434 all controlador de movimiento para máquinas CNC y robots (Español).
ii linuxcnc-doc-fr 1:2.8.2.11.g6a3d0a434 all motion controller for CNC machines and robots (French documentation)
un linuxcnc-sim <keine> <keine> (keine Beschreibung vorhanden)
un linuxcnc-sim-dev <keine> <keine> (keine Beschreibung vorhanden)
ii linuxcnc-uspace 1:2.8.2.11.g6a3d0a434 amd64 motion controller for CNC machines and robots
ii linuxcnc-uspace-dev 1:2.8.2.11.g6a3d0a434 amd64 PC based motion controller for real-time Linux
Attachments:
Please Log in or Create an account to join the conversation.
- andrax
-

- Offline
- Elite Member
-
- Posts: 312
- Thank you received: 82
Könne an deinen Bioseinstellungen liegen.
Linuxcnc hat wohl nicht genügend Rechte um auf die I/O zuzugreifen.
Du müsstest mal im Bios schauen, ob du Sequre Boot deaktivieren kannst oder Linuxcnc dort im EFI Modus die Rechte einräumen.
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
- Posts: 886
- Thank you received: 93
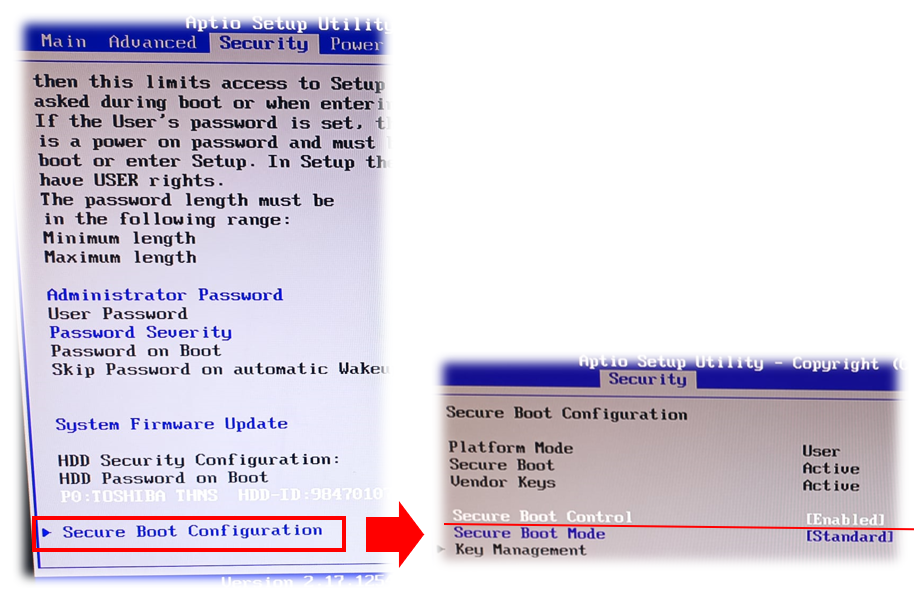
Das habe ich auf: Disabled gestellt das Standard habe ich gelassen.
Ich bekomme leider immer noch ein Fehlermeldung.

Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl:
Print file information:
RUN_IN_PLACE=no
LINUXCNC_DIR=
LINUXCNC_BIN_DIR=/usr/bin
LINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcnc
LINUXCNC_SCRIPT_DIR=
LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modules
LINUXCNC_CONFIG_DIR=
LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgs
INIVAR=inivar
HALCMD=halcmd
LINUXCNC_EMCSH=/usr/bin/wish8.6
LINUXCNC - 2.8.2-11-g6a3d0a434
Machine configuration directory is '/home/cnc/linuxcnc/configs/7i95'
Machine configuration file is '7i95.ini'
INIFILE=/home/cnc/linuxcnc/configs/7i95/7i95.ini
VERSION=1.1
PARAMETER_FILE=linuxcnc.var
TASK=milltask
HALUI=halui
DISPLAY=axis
COORDINATES=XYZ
KINEMATICS=trivkins coordinates=XYZ
Starting LinuxCNC...
Starting LinuxCNC server program: linuxcncsvr
Loading Real Time OS, RTAPI, and HAL_LIB modules
Starting LinuxCNC IO program: io
emc/iotask/ioControl.cc 702: can't load tool table.
Starting HAL User Interface program: halui
Found file(REL): ./7i95.hal
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 192.168.1.121: INFO: Hardware address (MAC): 00:60:1b:15:00:a7
hm2_eth: discovered 7I95
hm2/hm2_7i95.0: Low Level init 0.15
hm2/hm2_7i95.0: Smart Serial Firmware Version 43
hm2/hm2_7i95.0: 58 I/O Pins used:
hm2/hm2_7i95.0: IO Pin 000 (TB3-02/TB3-03): StepGen #0, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 001 (TB3-04/TB3-05): StepGen #0, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 002 (TB3-08/TB3-09): StepGen #1, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 003 (TB3-10/TB3-11): StepGen #1, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 004 (TB3-14/TB3-15): StepGen #2, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 005 (TB3-16/TB3-17): StepGen #2, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 006 (TB3-20/TB3-21): StepGen #3, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 007 (TB3-22/TB3-23): StepGen #3, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 008 (TB4-02/TB4-03): StepGen #4, pin Step (Output)
hm2/hm2_7i95.0: IO Pin 009 (TB4-04/TB4-05): StepGen #4, pin Direction (Output)
hm2/hm2_7i95.0: IO Pin 010 (TB4-08/TB4-09): IOPort
hm2/hm2_7i95.0: IO Pin 011 (TB4-10/TB4-11): IOPort
hm2/hm2_7i95.0: IO Pin 012 (TB4-14/TB4-15): IOPort
hm2/hm2_7i95.0: IO Pin 013 (TB4-16/TB4-17): IOPort
hm2/hm2_7i95.0: IO Pin 014 (TB3-16/TB3-17): IOPort
hm2/hm2_7i95.0: IO Pin 015 (TB4-20/TB4-21): IOPort
hm2/hm2_7i95.0: IO Pin 016 (TB4-22/TB4-23): IOPort
hm2/hm2_7i95.0: IO Pin 017 (TB4-22/TB4-23): IOPort
hm2/hm2_7i95.0: IO Pin 018 (TB1-01/TB1-09): Muxed Encoder #0, pin Muxed A (Input)
hm2/hm2_7i95.0: IO Pin 019 (TB1-04/TB1-12): Muxed Encoder #0, pin Muxed B (Input)
hm2/hm2_7i95.0: IO Pin 020 (TB1-07/TB1-15): Muxed Encoder #0, pin Muxed Index (Input)
hm2/hm2_7i95.0: IO Pin 021 (TB1-17/TB2-01): IOPort
hm2/hm2_7i95.0: IO Pin 022 (TB1-20/TB2-04): IOPort
hm2/hm2_7i95.0: IO Pin 023 (TB1-23/TB2-07): IOPort
hm2/hm2_7i95.0: IO Pin 024 (TB2-09/TB2-17): IOPort
hm2/hm2_7i95.0: IO Pin 025 (TB2-12/TB2-20): IOPort
hm2/hm2_7i95.0: IO Pin 026 (TB2-15/TB2-23): IOPort
hm2/hm2_7i95.0: IO Pin 027 (Internal EncMux): Muxed Encoder Select #0, pin Mux Select 0 (Output)
hm2/hm2_7i95.0: IO Pin 028 (Internal InMux0): InMux Input Mux #0, pin addr0 (Output)
hm2/hm2_7i95.0: IO Pin 029 (Internal InMux1): InMux Input Mux #0, pin addr1 (Output)
hm2/hm2_7i95.0: IO Pin 030 (Internal InMux2): InMux Input Mux #0, pin addr2 (Output)
hm2/hm2_7i95.0: IO Pin 031 (Internal InMux3): InMux Input Mux #0, pin addr3 (Output)
hm2/hm2_7i95.0: IO Pin 032 (Internal InMux4): InMux Input Mux #0, pin addr4 (Output)
hm2/hm2_7i95.0: IO Pin 033 (Internal InMuxData): InMux Input Mux #0, pin muxdata (Input)
hm2/hm2_7i95.0: IO Pin 034 (TB5-13/TB5-14): SSR #0, pin Out-00 (Output)
hm2/hm2_7i95.0: IO Pin 035 (TB5-15/TB5-16): SSR #0, pin Out-01 (Output)
hm2/hm2_7i95.0: IO Pin 036 (TB5-17/TB5-18): SSR #0, pin Out-02 (Output)
hm2/hm2_7i95.0: IO Pin 037 (TB5-19/TB5-20): SSR #0, pin Out-03 (Output)
hm2/hm2_7i95.0: IO Pin 038 (TB5-21/TB5-22): SSR #0, pin Out-04 (Output)
hm2/hm2_7i95.0: IO Pin 039 (TB5-23/TB5-24): SSR #0, pin Out-05 (Output)
hm2/hm2_7i95.0: IO Pin 040 (internal): SSR #0, pin AC Ref (internal) (Output)
hm2/hm2_7i95.0: IO Pin 041 (P1-01): IOPort
hm2/hm2_7i95.0: IO Pin 042 (P1-02): IOPort
hm2/hm2_7i95.0: IO Pin 043 (P1-03): IOPort
hm2/hm2_7i95.0: IO Pin 044 (P1-04): IOPort
hm2/hm2_7i95.0: IO Pin 045 (P1-05): IOPort
hm2/hm2_7i95.0: IO Pin 046 (P1-06): IOPort
hm2/hm2_7i95.0: IO Pin 047 (P1-07): IOPort
hm2/hm2_7i95.0: IO Pin 048 (P1-08): IOPort
hm2/hm2_7i95.0: IO Pin 049 (P1-09): IOPort
hm2/hm2_7i95.0: IO Pin 050 (P1-11): IOPort
hm2/hm2_7i95.0: IO Pin 051 (P1-13): IOPort
hm2/hm2_7i95.0: IO Pin 052 (P1-15): IOPort
hm2/hm2_7i95.0: IO Pin 053 (P1-17): IOPort
hm2/hm2_7i95.0: IO Pin 054 (P1-19): IOPort
hm2/hm2_7i95.0: IO Pin 055 (P1-21): IOPort
hm2/hm2_7i95.0: IO Pin 056 (P1-23): IOPort
hmFound file(REL): ./custom.hal
Starting TASK program: milltask
Starting DISPLAY program: axis
Shutting down and cleaning up LinuxCNC...
Running HAL shutdown script
task: 91 cycles, min=0.000027, max=0.012953, avg=0.008416, 0 latency excursions (> 10x expected cycle time of 0.010000s)
2/hm2_7i95.0: IO Pin 057 (P1-25): IOPort
hm2/hm2_7i95.0: registered
hm2_eth: in hm2_eth_reset
hm2_eth: HostMot2 ethernet driver unloaded
hm2: unloading
Removing HAL_LIB, RTAPI, and Real Time OS modules
Removing NML shared memory segments
Debug file information:
Note: Using POSIX realtime
note: MAXV max: 100.000 units/sec 6000.000 units/min
note: LJOG max: 100.000 units/sec 6000.000 units/min
note: LJOG default: 50.000 units/sec 3000.000 units/min
note: jog_order='XYZ'
note: jog_invert=set()
Could not open command file 'postgui_call_list.hal'
1566
1608
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
Info report created by linuxcnc_info:
The file: /tmp/linuxcnc_info.txt
can be posted to a forum or a web site like:
pastebin.com
in order to provide information about the linuxcnc
system and configuration.
Date: Mi 23. Mär 15:13:07 CET 2022
UTC Date: Mi 23. Mär 14:13:07 UTC 2022
this program: /usr/bin/linuxcnc_info
uptime: 15:13:07 up 1 min, 1 user, load average: 0,51, 0,21, 0,08
lsb_release -sa: Debian Debian GNU/Linux 10 (buster) 10 buster
which linuxcnc: /usr/bin/linuxcnc
pwd: /home/cnc/linuxcnc/configs/7i95
USER: cnc
LOGNAME: cnc
HOME: /home/cnc
EDITOR:
VISUAL:
LANGUAGE:
TERM: dumb
COLORTERM:
DISPLAY: :0.0
DESKTOP: xfce
display size: 1920x1080 pixels (508x285 millimeters)
PATH: /usr/bin:/home/cnc/linuxcnc/configs/7i95/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games
uname items:
nodename -n: CNC
kernel-name -s: Linux
kernel-vers -v: #1 SMP PREEMPT RT Debian 4.19.232-1 (2022-03-07)
machine -m: x86_64
processor -p: unknown
platform -i: unknown
oper system -o: GNU/Linux
/proc items:
cmdline: BOOT_IMAGE=/boot/vmlinuz-4.19.0-19-rt-amd64 root=UUID=eed6681a-1711-4683-9106-cbaa7298d14c ro quiet
model name: Intel(R) Core(TM) i3-6100 CPU @ 3.70GHz
cores: 2
cpu MHz: 3646.245
parport:
serial:
Versions:
gcc: gcc (Debian 8.3.0-6) 8.3.0
python: Python 2.7.16
git: not_in_PATH
git commit: NA
tcl: 8.6
tk: 8.6
glade: not_in_PATH
glade-gtk2: not_in_PATH
linuxcnc_var all:
LINUXCNCVERSION: 2.8.2-11-g6a3d0a434
LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcp
LINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples
REALTIME: /etc/init.d/realtime
RTS: uspace
HALLIB_DIR: /usr/share/linuxcnc/hallib
dpkg -l '*linuxcnc*':
Gewünscht=Unbekannt/Installieren/R=Entfernen/P=Vollständig Löschen/Halten
| Status=Nicht/Installiert/Config/U=Entpackt/halb konFiguriert/
Halb installiert/Trigger erWartet/Trigger anhängig
|/ Fehler?=(kein)/R=Neuinstallation notwendig (Status, Fehler: GROSS=schlecht)
||/ Name Version Architektur Beschreibung
+++-===================-=====================-============-=====================================================================
un linuxcnc <keine> <keine> (keine Beschreibung vorhanden)
un linuxcnc-dev <keine> <keine> (keine Beschreibung vorhanden)
un linuxcnc-doc <keine> <keine> (keine Beschreibung vorhanden)
ii linuxcnc-doc-en 1:2.8.2.11.g6a3d0a434 all motion controller for CNC machines and robots (English documentation)
ii linuxcnc-doc-es 1:2.8.2.11.g6a3d0a434 all controlador de movimiento para máquinas CNC y robots (Español).
ii linuxcnc-doc-fr 1:2.8.2.11.g6a3d0a434 all motion controller for CNC machines and robots (French documentation)
un linuxcnc-sim <keine> <keine> (keine Beschreibung vorhanden)
un linuxcnc-sim-dev <keine> <keine> (keine Beschreibung vorhanden)
ii linuxcnc-uspace 1:2.8.2.11.g6a3d0a434 amd64 motion controller for CNC machines and robots
ii linuxcnc-uspace-dev 1:2.8.2.11.g6a3d0a434 amd64 PC based motion controller for real-time Linux
Attachments:
Please Log in or Create an account to join the conversation.
- strahlensauger
-
- Offline
- Elite Member
-
- Posts: 195
- Thank you received: 66
postgui_call_list.hal
einach
ls -l
eingeben
es hat beim Hochladen noch ein Datum verpasst bekommen.
Du kannst sie im Terminal umbenennen mit
mv postgui_call_list_2022-03-21.hal postgui_call_list.hal
Please Log in or Create an account to join the conversation.
- strahlensauger
-
- Offline
- Elite Member
-
- Posts: 195
- Thank you received: 66
mv custom_postgui_2022-03-21.hal custom_postgui.hal
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
- Posts: 886
- Thank you received: 93
ich bin gerade dazu gekommen, nach den Daten zu schauern und wollte gerade schreiben.und dann auch noch
mv custom_postgui_2022-03-21.hal custom_postgui.hal
Habe das Datum raus genommen und bei einer zweiten Datei hat sich auch ein Datum dazu gemogelt, die habe ich beide entfernt (also das Datum aus dem Dateinamen).
Jetzt Startet LinuxCNC ich bin echt platt, es startet.
Habe mir gerade unter "Maschine >> HAL- Konfiguration Anzeigen" mal etwas durchgeblättert und verstehe nur Bahnhof.
Ich muss mir unbedingt anschauen welche Datei für was steht und was man darin machen kann.
Das erste was ich gerne Testen würde ist, ob die Sensoren alle gefunden werden und ob diese auch erkannt werden beim Auslösen (Status Änderung).
Das müsste schätze ich mal über den Menüpunkt
"Maschine >> HAL- Konfiguration Anzeigen" und dort das TAB Beobachten gehen.
muss nur noch raus finden was die Eingänge sind
")
Danach würde ich gerne die Motoren ein Stück laufen lassen.
Danach dann die Sensoren richtig zuordnen, Sprich 0 Punkt der Achse definieren und den Endpunkt.
Und dann schauen ob er auch den 0 Punkt findet und das Achsenende.
Oder ist eine andere Vorgehensweise besser geeignet?
7i95.hal =>
7i95.ini =>
custom.hal => Leer ?
custom_gvcp.hal => Leet?
shutdown.hal => Leer ?
postgui_call_list.hal =>
custom_postgui.hal =>
Please Log in or Create an account to join the conversation.
- strahlensauger
-
- Offline
- Elite Member
-
- Posts: 195
- Thank you received: 66
hast. Es sind nur 3 Stepper.
Das die Maschine startet ist doch schon mal ein sehr gutes Zeichen, ich hätte nicht gedacht, dass so wenig
Handarbeit nötig ist (Ich habe die Maschine von einem Raspberry Pi auf einer 7c80 geschrieben).
Das sollte auch nur erst mal ein Maschinchen sein zum Testen und weiter ausbauen.
Du kannst dir jetzt andere hal Dateien aus dem Forum runterladen und schauen wie die Sensoren dort angeschlossen
bzw. an welchen gpio geschaltet sind.
Ich habe vorhin in deinen Daten zur Maschine gesehen, dass deine Stepper 400 Schritte pro Umdrehung machen, dann werden
sie nicht rund laufen. Eventuell kannst du sie mit dip switches auf 200 Schritte runterregeln und dann dir Schrittzahl erhöhen bis sie rund laufen.
Ich würde die Konfiguration so behalten und eine Kopie davon benutzen um weiteres auszuprobieren.
Dann erstmal viel Spaß beim Bewegen der Motoren.
7i95.hal => Hier werden alle Sensoren Stepgeneratoren, PID-Regler und auch Buttons, Joystick etc mit den Pins auf der Mesakarte softwaremäßig vernetzt, Eine sehr mächtige Datei, hier liegt die Magie von Linuxcnc, wenn du die Datei lesen kannst wie eine Zeitung, dann hast du es geschafft
Kleinste Fehler hier oder in der ini verhindern einen Start der Maschine!!7i95.ini => Hier werden alle Startwerte initialisiert, Geschwindigkeiten, Beschleunigungen etc eingetragen
custom.hal => Ist dafür gedacht, wenn man die Hal mit PNCconfig erstellt, dass Sachen, die mit dem Editor eingetragen worden sind nicht überschrieben werden. Daher eine eigene hal Datei. Ist nicht mehr unbedingt relevant, wenn du die hal nur mit einem Editor bearbeitest...
custom_gvcp.hal => für die Oberflächen
shutdown.hal => zum runterfahren und abschalten von angeschlossenen Geräten
postgui_call_list.hal => Hal Liste von Datein für die Oberflächen
custom_postgui.hal => Hal Datei für die Oberflächen
Please Log in or Create an account to join the conversation.
- Muecke
-
Topic Author
- Offline
- Moderator
-
- Posts: 886
- Thank you received: 93
LinuxCNC startet. Bewegen tut sich noch nichts.
Kein Plan wie man das macht.
Daher zuerst die Sensoren dann weiter schauen.
Jedoch mache ich heute leider nichts mehr, Versuche morgen weiter zu machen, ich bin jedoch schon sehr glücklich das es überhaupt startet.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Online
- Moderator
-
- Posts: 21681
- Thank you received: 7405
MFG.
Please Log in or Create an account to join the conversation.