- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Stepper motor not running (Linux CNC + EtherCat + RPi 4)
Stepper motor not running (Linux CNC + EtherCat + RPi 4)
- db1981
- Offline
- Platinum Member
-

Less
More
- Posts: 790
- Thank you received: 276
29 Jan 2022 15:20 #233445
by db1981
Replied by db1981 on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
hmm,
this now all reads good.
Does the driver react to the enable signal? If enable is high , the pin stat-op-enabled from the cia comp should go high.
Maybe the drive needs some magic register config data. How did you attach the drive to twincat? Do you have an manufactures xml ? please post it or the twincat project.
this now all reads good.
Does the driver react to the enable signal? If enable is high , the pin stat-op-enabled from the cia comp should go high.
Maybe the drive needs some magic register config data. How did you attach the drive to twincat? Do you have an manufactures xml ? please post it or the twincat project.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
29 Jan 2022 16:10 - 29 Jan 2022 16:29 #233446
by Hakan
Replied by Hakan on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
I took Dj's config and ran it here. Changed vid and pid, put only the ECT60 drive on the ethercat bus and then started. It runs but there is a following error. Increased FERROR to 1 and then it runs. So with the ECT60 driver this works. This with the following error is something I have seen before and maybe we can come back to that once you have it running. Or, you mentioned you got a following error - increase FERROR to 1 or so to get that out of the way.
Last edit: 29 Jan 2022 16:29 by Hakan.
Please Log in or Create an account to join the conversation.
- Dj Junior
-
 Topic Author
Topic Author
- Offline
- Junior Member
-

Less
More
- Posts: 33
- Thank you received: 0
29 Jan 2022 16:30 - 29 Jan 2022 16:35 #233447
by Dj Junior
Replied by Dj Junior on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
halcmd getp cia402.0.stat-op-enabled returns false.
with
halcmd setp cia402.0.stat-op-enabled 1 return pin 'cia402.0.stat-op-enabled' is not writable (is read only)
I only connected one driver for testing
Here is the twincat file and manufacturer's xml
I renamed the file TwinCAT Project4.tsproj to TwinCAT Project4.xml to be able to upload it
with
halcmd setp cia402.0.stat-op-enabled 1 return pin 'cia402.0.stat-op-enabled' is not writable (is read only)
I only connected one driver for testing
Here is the twincat file and manufacturer's xml
I renamed the file TwinCAT Project4.tsproj to TwinCAT Project4.xml to be able to upload it
Attachments:
Last edit: 29 Jan 2022 16:35 by Dj Junior.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
29 Jan 2022 17:17 - 29 Jan 2022 17:18 #233452
by db1981
Replied by db1981 on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
if you take a look in Twincat, there are a lot of startup commands that are sent to configure the drive at startup. The default pdo mapping also differs a lot from the pdo mapping in the ethercat_conf. for example 6060 mode of op does not exist in the manufacuteres default pdo config on 0x1a00.
Im not sure if the etherlabmaster will create the right config, that depends on the content of the sii eeprom.
Please post the dmesg -w again (while starting linuxcnc) , with ethercat debug level set to 1. "ethercat debug 1"
Im not sure if the etherlabmaster will create the right config, that depends on the content of the sii eeprom.
Please post the dmesg -w again (while starting linuxcnc) , with ethercat debug level set to 1. "ethercat debug 1"
Last edit: 29 Jan 2022 17:18 by db1981.
Please Log in or Create an account to join the conversation.
- Dj Junior
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 0
29 Jan 2022 17:36 - 29 Jan 2022 17:40 #233456
by Dj Junior
Replied by Dj Junior on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
i found this in the manufacuteres xml file
<Object>
<Index>#x6060</Index>
<Name>Modes of Operation</Name>
<Type>USINT</Type>
<BitSize>8</BitSize>
<Flags>
<Access>rw</Access>
<PdoMapping>TR</PdoMapping>
</Flags>
</Object>
here it is the log
<Object>
<Index>#x6060</Index>
<Name>Modes of Operation</Name>
<Type>USINT</Type>
<BitSize>8</BitSize>
<Flags>
<Access>rw</Access>
<PdoMapping>TR</PdoMapping>
</Flags>
</Object>
here it is the log
Last edit: 29 Jan 2022 17:40 by Dj Junior.
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
29 Jan 2022 18:08 #233460
by db1981
Replied by db1981 on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
ok, mapping and configuring pdos is working.
normaly the drive should work, now we have to check if pins and values are in normal range.
please start linuxcnc and then halshow.
create an view with all the cia402 pins and do an screenshot , 1x after starting lcnc and 1x after switching/ enabling the axis (power on linuxcnc)
normaly the drive should work, now we have to check if pins and values are in normal range.
please start linuxcnc and then halshow.
create an view with all the cia402 pins and do an screenshot , 1x after starting lcnc and 1x after switching/ enabling the axis (power on linuxcnc)
Please Log in or Create an account to join the conversation.
- Dj Junior
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 0
29 Jan 2022 18:31 #233462
by Dj Junior
Replied by Dj Junior on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
here is the result
Attachments:
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
29 Jan 2022 19:01 #233465
by db1981
Replied by db1981 on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
If you look at the lcec pins, you can see that there is no ethercat communication at all. There is no feedback from the drive like statusword or act position.
This is strange, because the drive is op and there are no dmesg errors.
Did other ethercat devices like beckhoff I/O Cards worked already on this setup?
This is strange, because the drive is op and there are no dmesg errors.
Did other ethercat devices like beckhoff I/O Cards worked already on this setup?
Please Log in or Create an account to join the conversation.
- db1981
- Offline
- Platinum Member
-
Less
More
- Posts: 790
- Thank you received: 276
29 Jan 2022 19:07 #233466
by db1981
Replied by db1981 on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
one test could be to slow down the servo thread, maybe the drive has limitations.
try 4000000 (4ms) for servo-thread and apptimeperiod like it is in the twincat setup.
try 4000000 (4ms) for servo-thread and apptimeperiod like it is in the twincat setup.
Please Log in or Create an account to join the conversation.
- Dj Junior
-
Topic Author
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 0
29 Jan 2022 19:09 - 29 Jan 2022 19:10 #233467
by Dj Junior
Replied by Dj Junior on topic Stepper motor not running (Linux CNC + EtherCat + RPi 4)
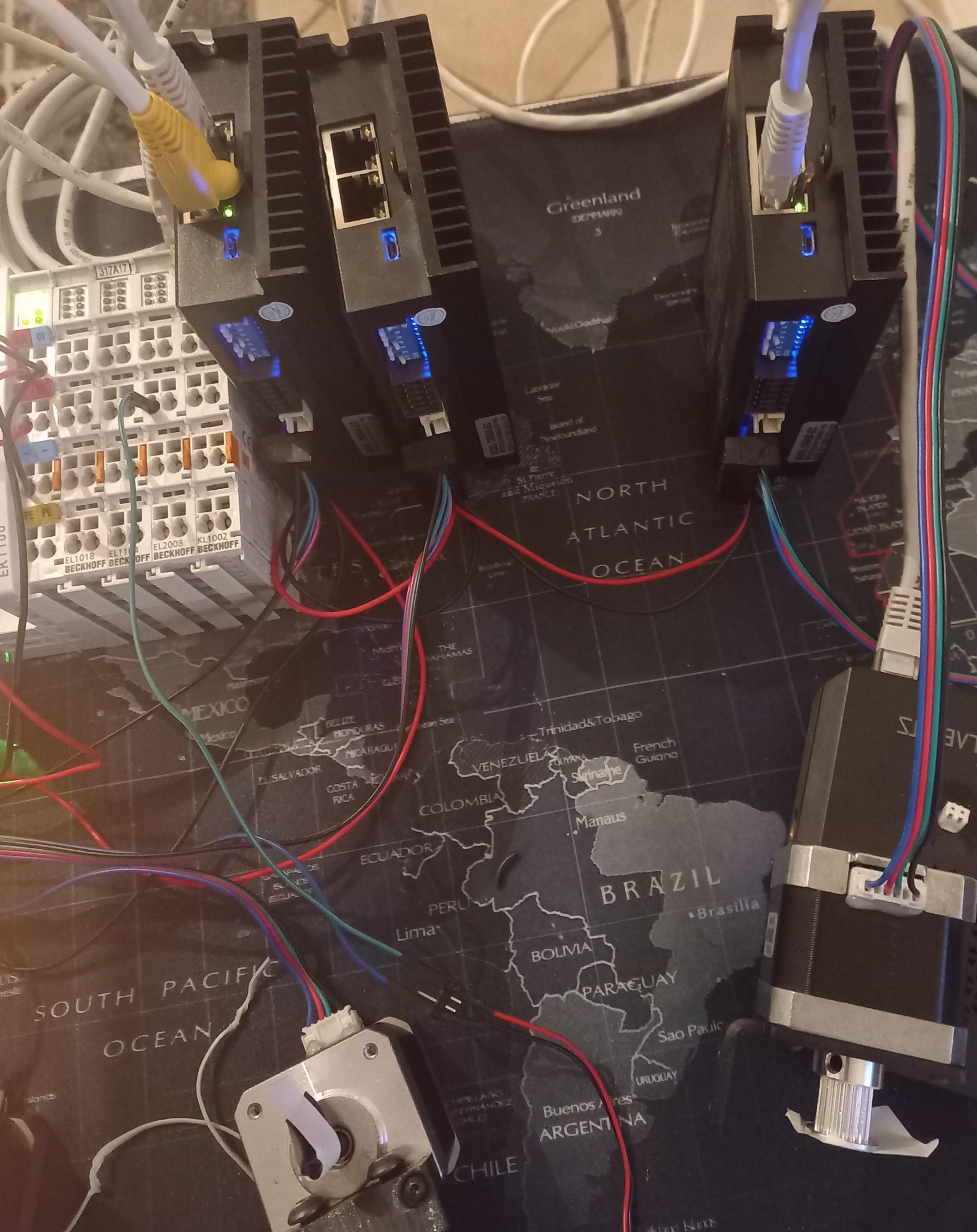
If I connect the EK1100 and EL2008 device
the command halcmd setp lcec.0.3.dout-2 1 works and the fan connected to pin 3 turns
the command halcmd setp lcec.0.3.dout-2 1 works and the fan connected to pin 3 turns
Last edit: 29 Jan 2022 19:10 by Dj Junior.
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- Stepper motor not running (Linux CNC + EtherCat + RPi 4)
Time to create page: 0.173 seconds