I’m lost and way behind on updates
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21663
- Thank you received: 7400
13 Jan 2021 13:38 #195218
by tommylight
Replied by tommylight on topic I’m lost and way behind on updates
Wicd is ok, the Mesa card can be accesed.
Please Log in or Create an account to join the conversation.
- JTknives
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 243
- Thank you received: 32
14 Jan 2021 04:43 #195283
by JTknives
Replied by JTknives on topic I’m lost and way behind on updates
Yeah I’m scratching my head and have no idea what’s going on. Probably going to have to ditch the Nice updates and go back to my vintage plasmaC.
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
14 Jan 2021 05:20 #195286
by phillc54
Replied by phillc54 on topic I’m lost and way behind on updates
What are the error messges in the terminal now?
Please Log in or Create an account to join the conversation.
- JTknives
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 243
- Thank you received: 32
14 Jan 2021 07:05 #195291
by JTknives
Replied by JTknives on topic I’m lost and way behind on updates
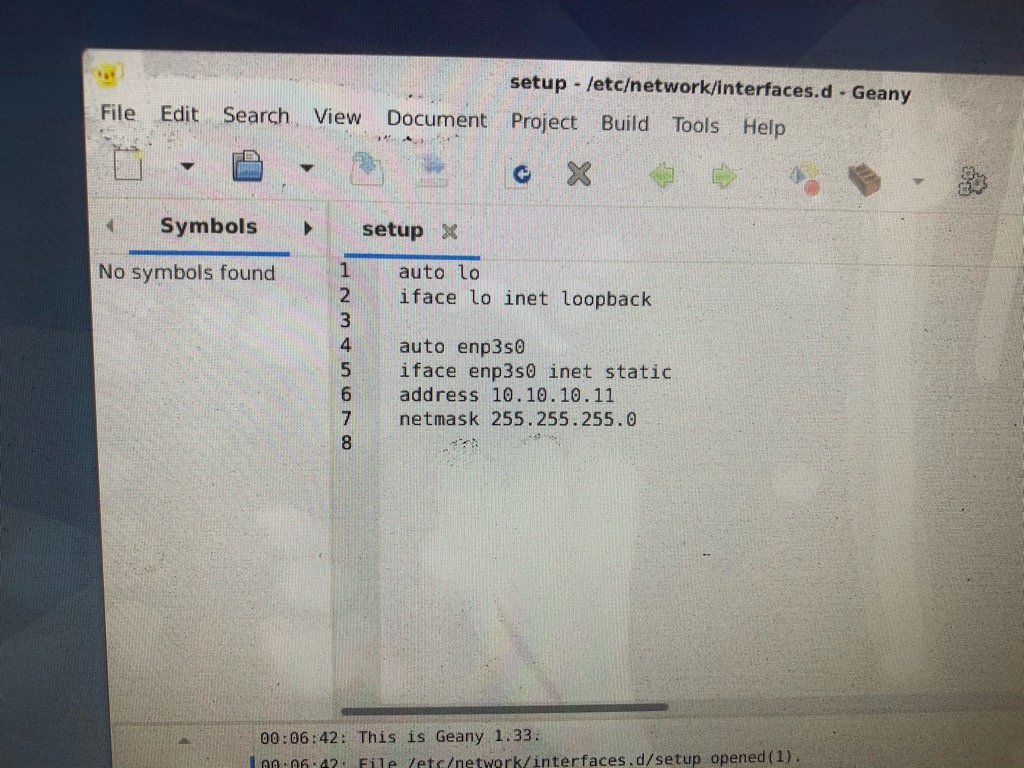
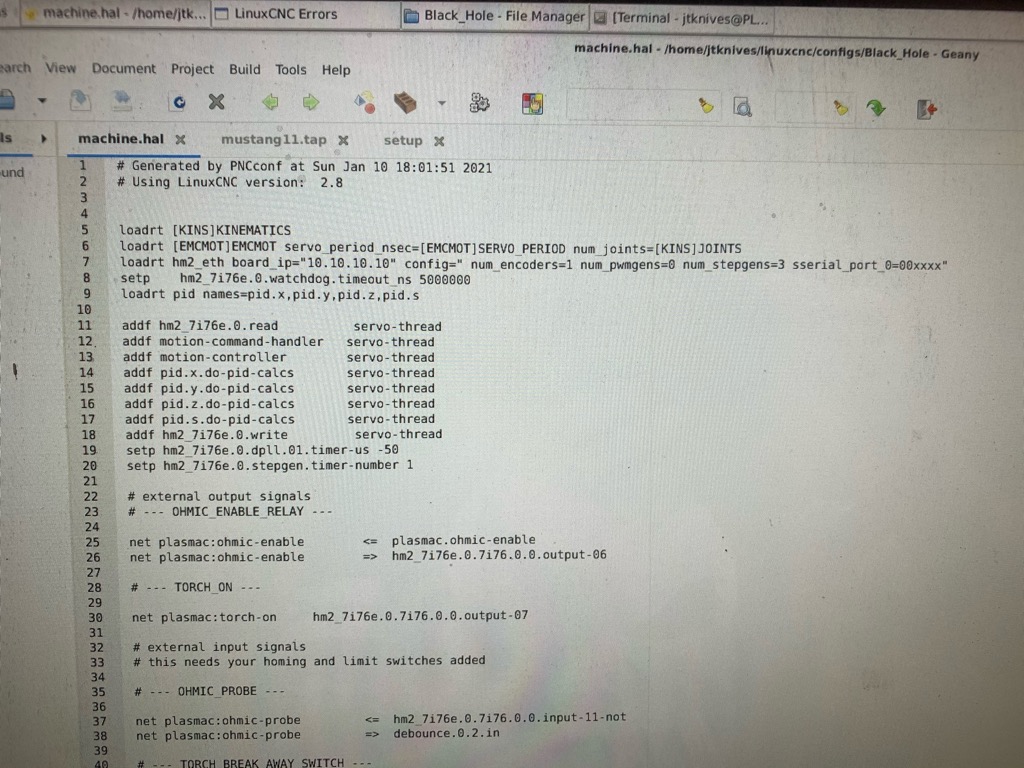
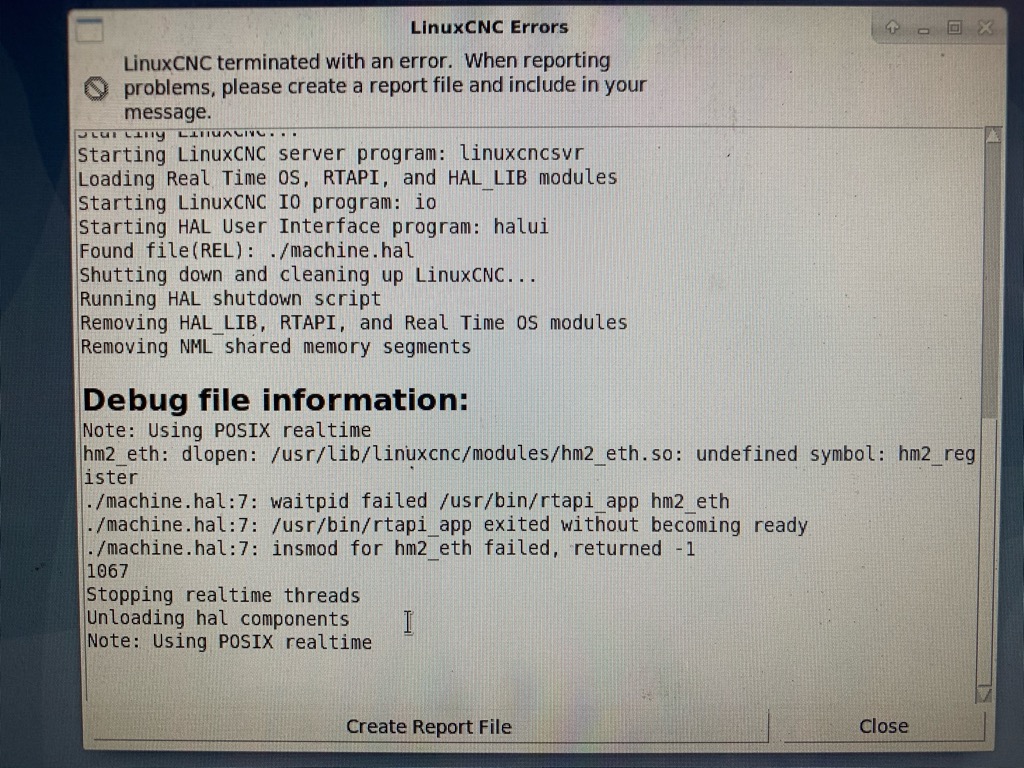
After I changed the IP address to the 10.10.10.11 it’s still the same. Something about unrecognized hm2 character and something about line 7 in my Hal file.
Attachments:
Please Log in or Create an account to join the conversation.
- JTknives
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 243
- Thank you received: 32
14 Jan 2021 07:07 #195292
by JTknives
Replied by JTknives on topic I’m lost and way behind on updates
Could it be the extra s on serial_port?
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
14 Jan 2021 08:08 #195294
by phillc54
Replied by phillc54 on topic I’m lost and way behind on updates
That looks correct, this is mine:The only difference I see is the space before num_encoders
Can you look at the hal file in geany and turn on view line endings and whitespace and see if there is anything odd in there.
It also may be worth asking on this forum section: forum.linuxcnc.org/27-driver-boards
loadrt hm2_eth board_ip="10.10.10.10" config="num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=00xxxx"Can you look at the hal file in geany and turn on view line endings and whitespace and see if there is anything odd in there.
It also may be worth asking on this forum section: forum.linuxcnc.org/27-driver-boards
Please Log in or Create an account to join the conversation.
- JTknives
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 243
- Thank you received: 32
14 Jan 2021 08:40 #195295
by JTknives
Replied by JTknives on topic I’m lost and way behind on updates
I figured it out, I was missingfacepalm
So now everything try's to connect but I get pin errors now. Are pins called out differently now in the new update? I attached my hal and ini files as well. I'm going to comb through the manual and see if i can figure out out. but if anyone notices a glaring error please let me know. thanks - JT
loadrt hostmot2So now everything try's to connect but I get pin errors now. Are pins called out differently now in the new update? I attached my hal and ini files as well. I'm going to comb through the manual and see if i can figure out out. but if anyone notices a glaring error please let me know. thanks - JT
Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl:
Print file information:
RUN_IN_PLACE=no
LINUXCNC_DIR=
LINUXCNC_BIN_DIR=/usr/bin
LINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcnc
LINUXCNC_SCRIPT_DIR=
LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modules
LINUXCNC_CONFIG_DIR=
LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgs
INIVAR=inivar
HALCMD=halcmd
LINUXCNC_EMCSH=/usr/bin/wish8.6
LINUXCNC - 2.8.0
Machine configuration directory is '/home/jtknives/linuxcnc/configs/Black_Hole'
Machine configuration file is 'Black_Hole.ini'
INIFILE=/home/jtknives/linuxcnc/configs/Black_Hole/Black_Hole.ini
VERSION=1.1
PARAMETER_FILE=linuxcnc.var
TASK=milltask
HALUI=halui
DISPLAY=gmoccapy
COORDINATES=XYZ
KINEMATICS=trivkins coordinates=XYZ
Starting LinuxCNC...
Starting LinuxCNC server program: linuxcncsvr
Loading Real Time OS, RTAPI, and HAL_LIB modules
Starting LinuxCNC IO program: io
Starting HAL User Interface program: halui
Found file(REL): ./machine.hal
Shutting down and cleaning up LinuxCNC...
Running HAL shutdown script
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 10.10.10.10: Hardware address: 00:60:1b:10:80:32
hm2_eth: discovered 7I76E-16
hm2/hm2_7i76e.0: Smart Serial Firmware Version 43
Board hm2_7i76e.0.7i76.0.0 Hardware Mode 0 = standard
Board hm2_7i76e.0.7i76.0.0 Software Mode 0 = io_spin
Board hm2_7i76e.0.7i76.0.0 Software Mode 1 = io_ana_spin
Board hm2_7i76e.0.7i76.0.0 Software Mode 2 = io_enc_ana_spin_fv
hm2/hm2_7i76e.0: 51 I/O Pins used:
hm2/hm2_7i76e.0: IO Pin 000 (P1-01): StepGen #0, pin Direction (Output)
hm2/hm2_7i76e.0: IO Pin 001 (P1-14): StepGen #0, pin Step (Output)
hm2/hm2_7i76e.0: IO Pin 002 (P1-02): StepGen #1, pin Direction (Output)
hm2/hm2_7i76e.0: IO Pin 003 (P1-15): StepGen #1, pin Step (Output)
hm2/hm2_7i76e.0: IO Pin 004 (P1-03): StepGen #2, pin Direction (Output)
hm2/hm2_7i76e.0: IO Pin 005 (P1-16): StepGen #2, pin Step (Output)
hm2/hm2_7i76e.0: IO Pin 006 (P1-04): IOPort
hm2/hm2_7i76e.0: IO Pin 007 (P1-17): IOPort
hm2/hm2_7i76e.0: IO Pin 008 (P1-05): IOPort
hm2/hm2_7i76e.0: IO Pin 009 (P1-06): IOPort
hm2/hm2_7i76e.0: IO Pin 010 (P1-07): Smart Serial Interface #0, pin TxData0 (Output)
hm2/hm2_7i76e.0: IO Pin 011 (P1-08): Smart Serial Interface #0, pin RxData0 (Input)
hm2/hm2_7i76e.0: IO Pin 012 (P1-09): IOPort
hm2/hm2_7i76e.0: IO Pin 013 (P1-10): IOPort
hm2/hm2_7i76e.0: IO Pin 014 (P1-11): Encoder #0, pin Index (Input)
hm2/hm2_7i76e.0: IO Pin 015 (P1-12): Encoder #0, pin B (Input)
hm2/hm2_7i76e.0: IO Pin 016 (P1-13): Encoder #0, pin A (Input)
hm2/hm2_7i76e.0: IO Pin 017 (P2-01): IOPort
hm2/hm2_7i76e.0: IO Pin 018 (P2-14): IOPort
hm2/hm2_7i76e.0: IO Pin 019 (P2-02): IOPort
hm2/hm2_7i76e.0: IO Pin 020 (P2-15): IOPort
hm2/hm2_7i76e.0: IO Pin 021 (P2-03): IOPort
hm2/hm2_7i76e.0: IO Pin 022 (P2-16): IOPort
hm2/hm2_7i76e.0: IO Pin 023 (P2-04): IOPort
hm2/hm2_7i76e.0: IO Pin 024 (P2-17): IOPort
hm2/hm2_7i76e.0: IO Pin 025 (P2-05): IOPort
hm2/hm2_7i76e.0: IO Pin 026 (P2-06): IOPort
hm2/hm2_7i76e.0: IO Pin 027 (P2-07): IOPort
hm2/hm2_7i76e.0: IO Pin 028 (P2-08): IOPort
hm2/hm2_7i76e.0: IO Pin 029 (P2-09): IOPort
hm2/hm2_7i76e.0: IO Pin 030 (P2-10): IOPort
hm2/hm2_7i76e.0: IO Pin 031 (P2-11): IOPort
hm2/hm2_7i76e.0: IO Pin 032 (P2-12): IOPort
hm2/hm2_7i76e.0: IO Pin 033 (P2-13): IOPort
hm2/hm2_7i76e.0: IO Pin 034 (P3-01): IOPort
hm2/hm2_7i76e.0: IO Pin 035 (P3-14): IOPort
hm2/hm2_7i76e.0: IO Pin 036 (P3-02): IOPort
hm2/hm2_7i76e.0: IO Pin 037 (P3-15): IOPort
hm2/hm2_7i76e.0: IO Pin 038 (P3-03): IOPort
hm2/hm2_7i76e.0: IO Pin 039 (P3-16): IOPort
hm2/hm2_7i76e.0: IO Pin 040 (P3-04): IOPort
hm2/hm2_7i76e.0: IO Pin 041 (P3-17): IOPort
hm2/hm2_7i76e.0: IO Pin 042 (P3-05): IOPort
hm2/hm2_7i76e.0: IO Pin 043 (P3-06): IOPort
hm2/hm2_7i76e.0: IO Pin 044 (P3-07): IOPort
hm2/hm2_7i76e.0: IO Pin 045 (P3-08): IOPort
hm2/hm2_7i76e.0: IO Pin 046 (P3-09): IOPort
hm2/hm2_7i76e.0: IO Pin 047 (P3-10): IOPort
hm2/hm2_7i76e.0: IO Pin 048 (P3-11): IOPort
hm2/hm2_7i76e.0: IO Pin 049 (P3-12): IOPort
hm2/hm2_7i76e.0: IO Pin 050 (P3-13): IOPort
hm2/hm2_7i76e.0: registered
hm2_eth: HostMot2 ethernet driver unloaded
hm2: unloading
Removing HAL_LIB, RTAPI, and Real Time OS modules
Removing NML shared memory segments
Debug file information:
Note: Using POSIX realtime
./machine.hal:26: Pin 'plasmac.ohmic-enable' does not exist
1096
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
-----------------------------------------------------------------------
Info report created by linuxcnc_info:
The file: /tmp/linuxcnc_info.txt
can be posted to a forum or a web site like:
http://pastebin.com
in order to provide information about the linuxcnc
system and configuration.
Date: Thu 14 Jan 2021 01:17:09 AM MST
UTC Date: Thu 14 Jan 2021 08:17:09 AM UTC
this program: /usr/bin/linuxcnc_info
uptime: 01:17:09 up 5 min, 1 user, load average: 0.43, 0.69, 0.36
lsb_release -sa: Debian Debian GNU/Linux 10 (buster) 10 buster
which linuxcnc: /usr/bin/linuxcnc
pwd: /home/jtknives/linuxcnc/configs/Black_Hole
USER: jtknives
LOGNAME: jtknives
HOME: /home/jtknives
EDITOR:
VISUAL:
LANGUAGE:
TERM: dumb
COLORTERM:
DISPLAY: :0.0
DESKTOP: lightdm-xsession
display size: 1920x1080 pixels (508x285 millimeters)
PATH: /usr/bin:/home/jtknives/linuxcnc/configs/Black_Hole/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games
uname items:
nodename -n: PLASMA
kernel-name -s: Linux
kernel-vers -v: #1 SMP PREEMPT RT Debian 4.19.146-1 (2020-09-17)
machine -m: x86_64
processor -p: unknown
platform -i: unknown
oper system -o: GNU/Linux
/proc items:
cmdline: BOOT_IMAGE=/boot/vmlinuz-4.19.0-11-rt-amd64 root=UUID=82254118-9c28-4b50-bb5b-0d81fe1e0256 ro initrd=/install/gtk/initrd.gz quiet
model name: Intel(R) Celeron(R) CPU J1900 @ 1.99GHz
cores: 4
cpu MHz: 1332.810
parport:
serial: 0000-0000 : serial
Versions:
gcc: gcc (Debian 8.3.0-6) 8.3.0
python: Python 2.7.16
git: not_in_PATH
git commit: NA
tcl: 8.6
tk: 8.6
glade: not_in_PATH
glade-gtk2: not_in_PATH
linuxcnc_var all:
LINUXCNCVERSION: 2.8.0
LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcp
LINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples
REALTIME: /etc/init.d/realtime
RTS: uspace
HALLIB_DIR: /usr/share/linuxcnc/hallib
dpkg -l '*linuxcnc*':
Desired=Unknown/Install/Remove/Purge/Hold
| Status=Not/Inst/Conf-files/Unpacked/halF-conf/Half-inst/trig-aWait/Trig-pend
|/ Err?=(none)/Reinst-required (Status,Err: uppercase=bad)
||/ Name Version Architecture Description
+++-===================-============-============-=====================================================================
un linuxcnc <none> <none> (no description available)
un linuxcnc-dev <none> <none> (no description available)
un linuxcnc-doc <none> <none> (no description available)
ii linuxcnc-doc-cn 1:2.8.0 all motion controller for CNC machines and robots (Chinese
ii linuxcnc-doc-en 1:2.8.0 all motion controller for CNC machines and robots (English documentation)
ii linuxcnc-doc-es 1:2.8.0 all controlador de movimiento para máquinas CNC y robots (Español).
ii linuxcnc-doc-fr 1:2.8.0 all motion controller for CNC machines and robots (French documentation)
un linuxcnc-sim <none> <none> (no description available)
un linuxcnc-sim-dev <none> <none> (no description available)
ii linuxcnc-uspace 1:2.8.0 amd64 motion controller for CNC machines and robots
ii linuxcnc-uspace-dev 1:2.8.0 amd64 PC based motion controller for real-time LinuxPlease Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
14 Jan 2021 08:47 #195296
by phillc54
Replied by phillc54 on topic I’m lost and way behind on updates
This looks like it is your base machine before running the plasmac configurator.
There should be no plasmac related pins yet, they will be put in the <machine>_connections.hal file by the configurator.
There should be no plasmac related pins yet, they will be put in the <machine>_connections.hal file by the configurator.
Please Log in or Create an account to join the conversation.
- JTknives
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 243
- Thank you received: 32
14 Jan 2021 10:03 #195299
by JTknives
Replied by JTknives on topic I’m lost and way behind on updates
So thy are no longer in the machine.hal? That’s where thy where in my original set up.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
14 Jan 2021 10:08 #195300
by phillc54
Replied by phillc54 on topic I’m lost and way behind on updates
That is not normal. In a standard PlasmaC install they are in <machine>_connections.hal. It had always been this way. Your originals must have been hand edited.
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.182 seconds