Configure PlasmaC with only one BOB
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
08 Feb 2021 23:17 #198092
by andypugh
Replied by andypugh on topic Configure PlasmaC with only one BOB
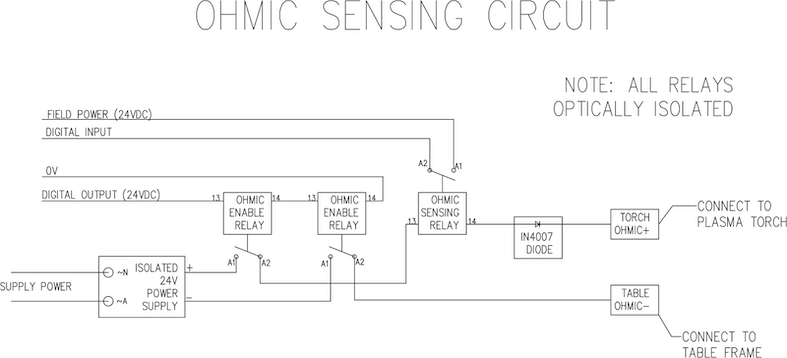
Is there a reason (location?) why you are using half the relays on two boards rather than 3 on one board?
Please Log in or Create an account to join the conversation.
- Giuseppe
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 81
- Thank you received: 9
09 Feb 2021 11:23 #198137
by Giuseppe
Replied by Giuseppe on topic Configure PlasmaC with only one BOB
I am not sure. But i think when i am using only one board i can't wire it like the shematic .
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-
Less
More
- Posts: 21697
- Thank you received: 7415
09 Feb 2021 14:10 #198144
by tommylight
Replied by tommylight on topic Configure PlasmaC with only one BOB
I would not use that type of relays for ohmic or anything to do with plasma torch, chances of arcing over are huge.
Big DIN rail mounted relays are much safer.
Big DIN rail mounted relays are much safer.
Please Log in or Create an account to join the conversation.
- Giuseppe
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 81
- Thank you received: 9
11 Feb 2021 08:19 #198366
by Giuseppe
Replied by Giuseppe on topic Configure PlasmaC with only one BOB
Maybe you are right. But i think or hope it will work for the a simple test run.
Later i can change it with other relay.
But again, about the wiring? Is this the right way?
I will try it.
Later i can change it with other relay.
But again, about the wiring? Is this the right way?
I will try it.
Please Log in or Create an account to join the conversation.
- Giuseppe
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 81
- Thank you received: 9
05 Mar 2021 20:16 #201124
by Giuseppe
Replied by Giuseppe on topic Configure PlasmaC with only one BOB
Hi all,
i wired it up and want to test the config. When i start plasmac the THC Enable LED is green and Ohmic Probe is yellow. When i touch the torch with the table the yellow LED turns grey. I think this is not how it should work?
Any ideas?
thanks
Giuseppe
i wired it up and want to test the config. When i start plasmac the THC Enable LED is green and Ohmic Probe is yellow. When i touch the torch with the table the yellow LED turns grey. I think this is not how it should work?
Any ideas?
thanks
Giuseppe
Please Log in or Create an account to join the conversation.
- phillc54
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
05 Mar 2021 22:11 #201138
by phillc54
Replied by phillc54 on topic Configure PlasmaC with only one BOB
You probably need to invert the hal input input pin by changing it to "in-not"
Please Log in or Create an account to join the conversation.
- Giuseppe
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 81
- Thank you received: 9
07 Mar 2021 08:54 - 07 Mar 2021 09:47 #201262
by Giuseppe
Replied by Giuseppe on topic Configure PlasmaC with only one BOB
I do this before but get still the problem.
Please check my hal.
also the connections.hal
maybe something is wrong.
Please check my hal.
# Generated by stepconf 1.1 at Fri Dec 25 19:31:57 2020
# If you make changes to this file, they will be
# overwritten when you run stepconf again
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS num_spindles=[TRAJ]SPINDLES
loadrt hal_parport cfg="0 out"
setp parport.0.reset-time 5000
loadrt stepgen step_type=0,0,0,0
addf parport.0.read base-thread
addf stepgen.make-pulses base-thread
addf parport.0.write base-thread
addf parport.0.reset base-thread
addf stepgen.capture-position servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf stepgen.update-freq servo-thread
# net spindle-cmd-rpm <= spindle.0.speed-out
# net spindle-cmd-rpm-abs <= spindle.0.speed-out-abs
# net spindle-cmd-rps <= spindle.0.speed-out-rps
# net spindle-cmd-rps-abs <= spindle.0.speed-out-rps-abs
# net spindle-at-speed => spindle.0.at-speed
net xstep => parport.0.pin-02-out
setp parport.0.pin-02-out-reset 1
setp parport.0.pin-03-out-invert 1
net xdir => parport.0.pin-03-out
net ystep => parport.0.pin-04-out
setp parport.0.pin-04-out-reset 1
setp parport.0.pin-05-out-invert 1
net ydir => parport.0.pin-05-out
net zstep => parport.0.pin-06-out
setp parport.0.pin-06-out-reset 1
setp parport.0.pin-07-out-invert 1
net zdir => parport.0.pin-07-out
net y1step => parport.0.pin-08-out
setp parport.0.pin-08-out-reset 1
setp parport.0.pin-09-out-invert 1
net y1dir => parport.0.pin-09-out
net xenable => parport.0.pin-14-out
net all-home <= parport.0.pin-11-in-not
net home-y1 <= parport.0.pin-10-in-not
net dout-001 => parport.0.pin-16-out
net dout-011 => parport.0.pin-17-out
net din-001 <= debounce.0.2.in
net din-011 <= plasmac.move-up
net din-021 <= plasmac.move-down
net din-031 <= plasmac.arc-ok-in
setp stepgen.0.position-scale [JOINT_0]SCALE
setp stepgen.0.steplen 1
setp stepgen.0.stepspace 0
setp stepgen.0.dirhold 35000
setp stepgen.0.dirsetup 35000
setp stepgen.0.maxaccel [JOINT_0]STEPGEN_MAXACCEL
net xpos-cmd joint.0.motor-pos-cmd => stepgen.0.position-cmd
net xpos-fb stepgen.0.position-fb => joint.0.motor-pos-fb
net xstep <= stepgen.0.step
net xdir <= stepgen.0.dir
net xenable joint.0.amp-enable-out => stepgen.0.enable
net all-home => joint.0.home-sw-in
setp stepgen.1.position-scale [JOINT_1]SCALE
setp stepgen.1.steplen 1
setp stepgen.1.stepspace 0
setp stepgen.1.dirhold 35000
setp stepgen.1.dirsetup 35000
setp stepgen.1.maxaccel [JOINT_1]STEPGEN_MAXACCEL
net ypos-cmd joint.1.motor-pos-cmd => stepgen.1.position-cmd
net ypos-fb stepgen.1.position-fb => joint.1.motor-pos-fb
net ystep <= stepgen.1.step
net ydir <= stepgen.1.dir
net yenable joint.1.amp-enable-out => stepgen.1.enable
net home-y1 => joint.1.home-sw-in
setp stepgen.2.position-scale [JOINT_2]SCALE
setp stepgen.2.steplen 1
setp stepgen.2.stepspace 0
setp stepgen.2.dirhold 35000
setp stepgen.2.dirsetup 35000
setp stepgen.2.maxaccel [JOINT_1]STEPGEN_MAXACCEL
net y1pos-cmd joint.2.motor-pos-cmd => stepgen.2.position-cmd
net y1pos-fb stepgen.2.position-fb => joint.2.motor-pos-fb
net y1step <= stepgen.2.step
net y1dir <= stepgen.2.dir
net y1enable joint.2.amp-enable-out => stepgen.2.enable
net all-home => joint.2.home-sw-in
setp stepgen.3.position-scale [JOINT_3]SCALE
setp stepgen.3.steplen 1
setp stepgen.3.stepspace 0
setp stepgen.3.dirhold 35000
setp stepgen.3.dirsetup 35000
setp stepgen.3.maxaccel [JOINT_3]STEPGEN_MAXACCEL
net zpos-cmd joint.3.motor-pos-cmd => stepgen.3.position-cmd
net zpos-fb stepgen.3.position-fb => joint.3.motor-pos-fb
net zstep <= stepgen.3.step
net zdir <= stepgen.3.dir
net zenable joint.3.amp-enable-out => stepgen.3.enable
net all-home => joint.3.home-sw-in
net estop-out <= iocontrol.0.user-enable-out
net estop-out => iocontrol.0.emc-enable-in
# loadusr -W hal_manualtoolchange
# net tool-change iocontrol.0.tool-change => hal_manualtoolchange.change
# net tool-changed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
# net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
# net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
# toolchange passthrough
net tool:change iocontrol.0.tool-change => iocontrol.0.tool-changed
net tool:prep iocontrol.0.tool-prepare => iocontrol.0.tool-preparedalso the connections.hal
# Keep your plasmac i/o connections here to prevent them from
# being overwritten by updates or pncconf/stepconf changes
# Other customisations may be placed here as well
# This file is built by the configurator in your configuration directory
#***** debounce for the float, ohmic and breakaway switches *****
# the lower the delay here the better
# each 1 is a 0.001mm (0.00004") increase in probed height result
loadrt debounce cfg=3
setp debounce.0.delay 5
addf debounce.0 servo-thread
#***** arc voltage lowpass cutoff frequency *****
#***** change to the cutoff frequency you require *****
setp plasmac.lowpass-frequency 0
#***** the joint associated with the Z axis *****
net plasmac:axis-position joint.3.pos-fb => plasmac.axis-z-position
net din-031 parport.0.pin-15-in-not => plasmac.arc-ok-in
# net plasmac:float-switch {YOUR FLOAT SWITCH PIN} => debounce.0.0.in
# net plasmac:breakaway {YOUR BREAKAWAY PIN} => debounce.0.1.in
net din-001 parport.0.pin-11-in => debounce.0.2.in
net dout-001 plasmac.ohmic-enable => parport.0.pin-16-out
net dout-011 => parport.0.pin-17-out
net din-011 parport.0.pin-12-in => plasmac.move-up
net din-021 parport.0.pin-13-in => plasmac.move-down
# a 1 here allows multiple tools to be used
# gcode M3 S1 needs to be changed to:
# M3 $0 S1 for the plasma torch
# M3 $1 S1 for the scribe
# M3 $2 S1 for spotting
setp plasmac.multi-tool 0
# net plasmac:scribe-arm plasmac.scribe-arm => ***YOUR_SCRIBE_ARMING_OUTPUT***
# net plasmac:scribe-on plasmac.scribe-on => ***YOUR_SCRIBE_ON_OUTPUT***
maybe something is wrong.
Last edit: 07 Mar 2021 09:47 by Giuseppe.
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
07 Mar 2021 09:00 #201263
by phillc54
Replied by phillc54 on topic Configure PlasmaC with only one BOB
connections.hal is a duplicate of the machine.
hal file
hal file
Please Log in or Create an account to join the conversation.
- Giuseppe
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 81
- Thank you received: 9
07 Mar 2021 09:48 #201269
by Giuseppe
Replied by Giuseppe on topic Configure PlasmaC with only one BOB
sorry my fault
Please Log in or Create an account to join the conversation.
- phillc54
-
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
07 Mar 2021 09:58 #201271
by phillc54
Replied by phillc54 on topic Configure PlasmaC with only one BOB
Try changing:to:
net din-001 parport.0.pin-11-in => debounce.0.2.innet din-001 parport.0.pin-11-in-not => debounce.0.2.inPlease Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.120 seconds