- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4764
- Thank you received: 1464
08 May 2017 18:32 #92857
by Todd Zuercher
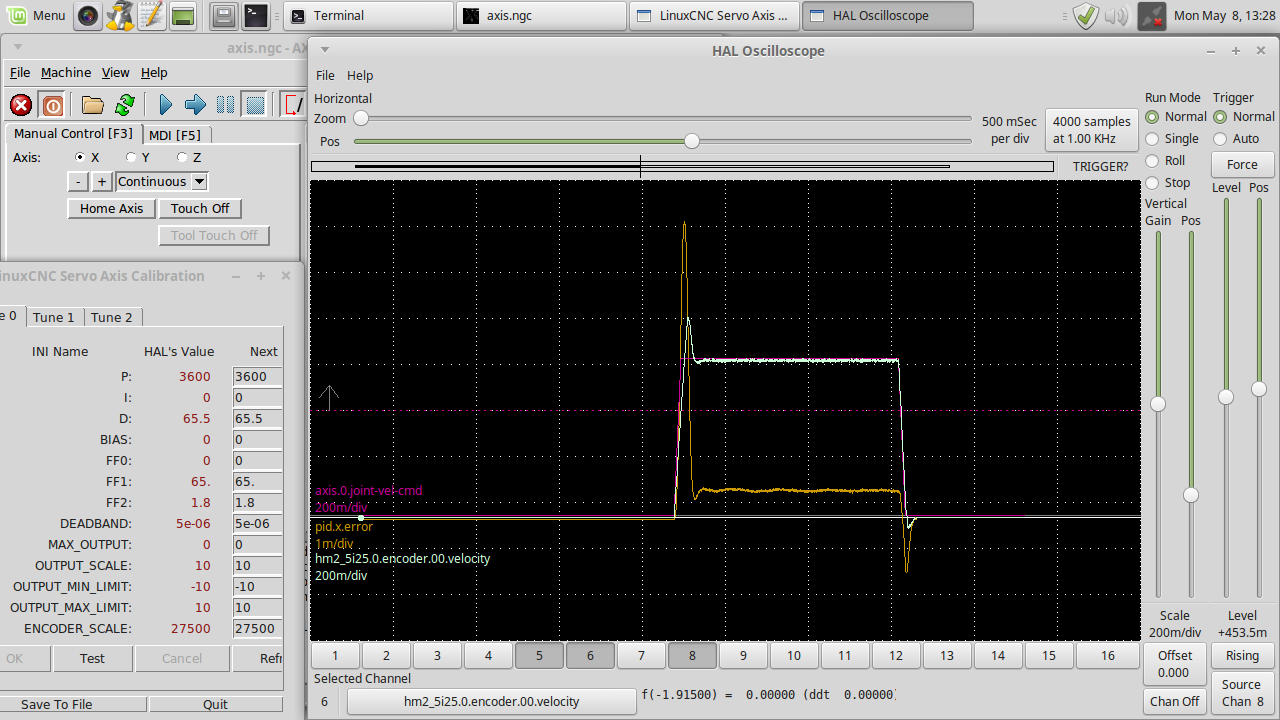
Oops, I saw the 200m/div for the vel-cmd and thought that was the scale for the following error. In that case it wasn't that bad.
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
It is showing nearly a 1 inch following error during the acceleration phase of the move.
Isn't that 6 milli-inches? Or am I misunderstanding?
(I had been interpreting it as microns, and thinking it looked quite good)
Oops, I saw the 200m/div for the vel-cmd and thought that was the scale for the following error. In that case it wasn't that bad.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 18:40 #92858
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many thanks!
The velocity trace is back on in the hal meter.
compare this to prior screenshot of nearly same name.
many thanks!
The velocity trace is back on in the hal meter.
compare this to prior screenshot of nearly same name.
many thanks!
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
08 May 2017 20:06 #92873
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Try setting your max_acceleration to 8 or 10, (and I think you might be able to set the max_velocity a bit higher try 1 or 2).
What does more FF2 do?
What does more FF2 do?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 21:19 #92877
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
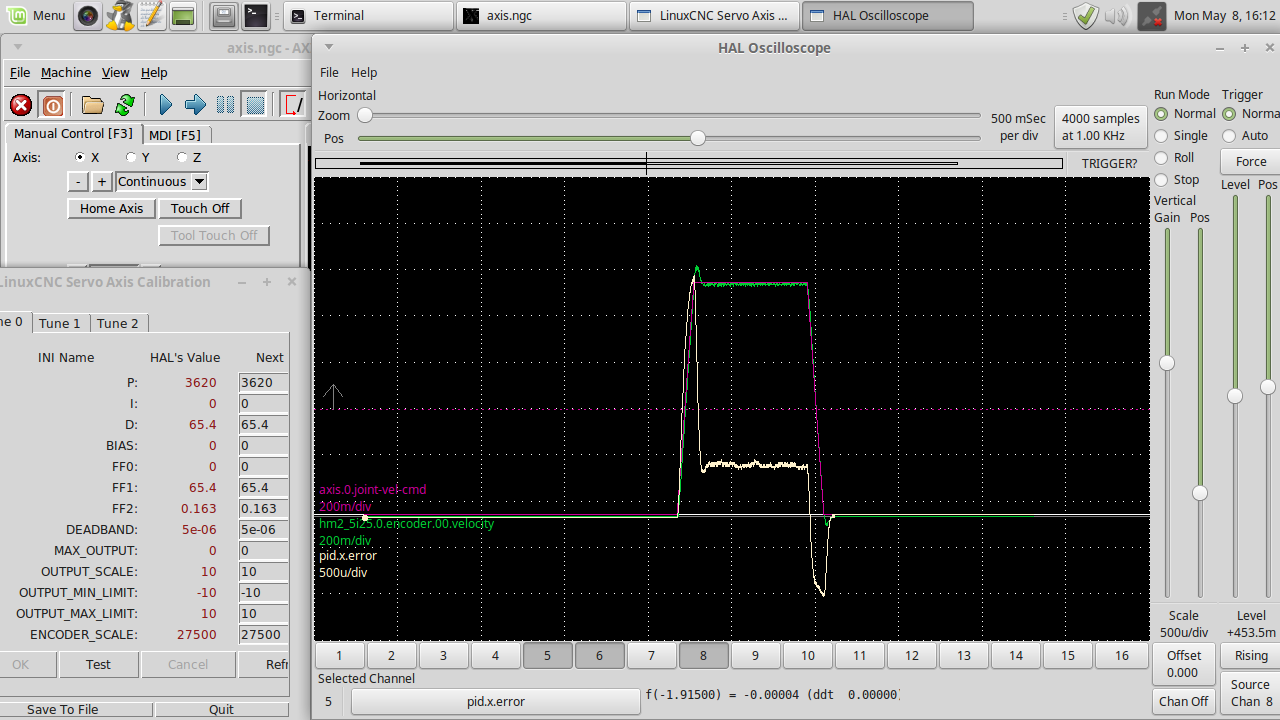
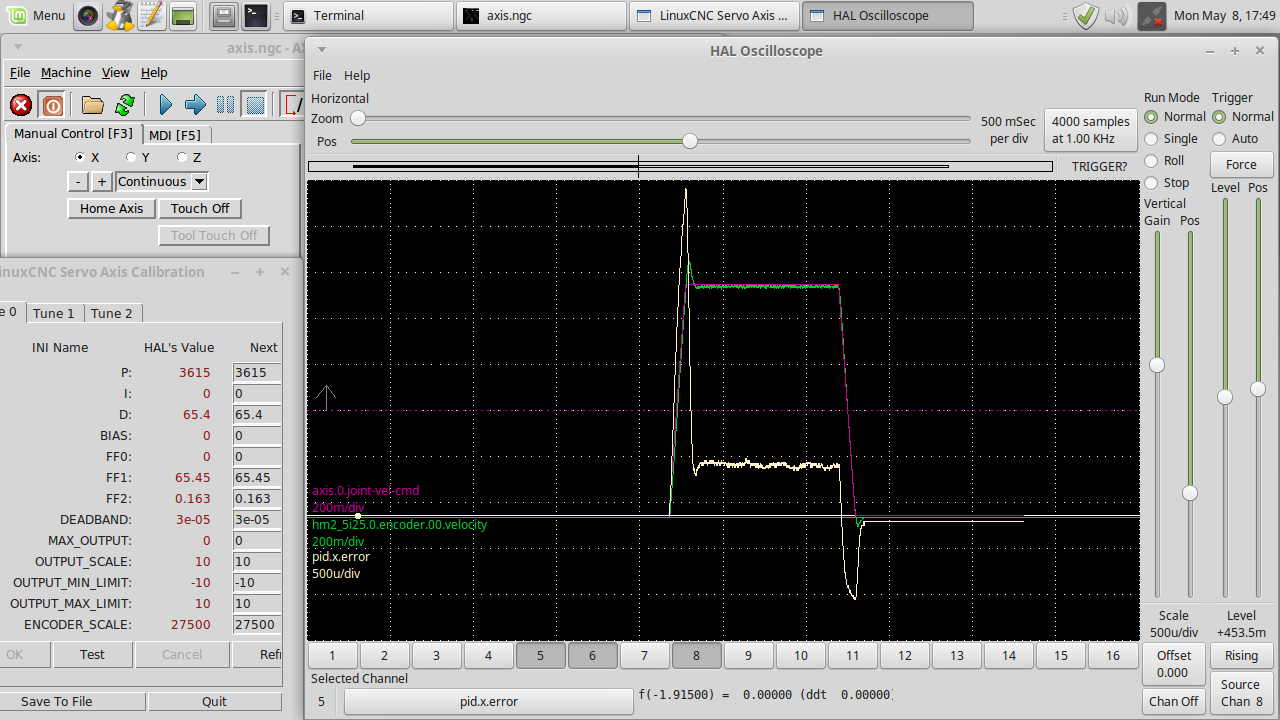
Many thanks, Todd! The f.error is best yet.
Attached are a few pics and .ini file, read file name for description of trace.
many, many thanks to all that have been part of this project!
Attached are a few pics and .ini file, read file name for description of trace.
many, many thanks to all that have been part of this project!
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 23:07 - 08 May 2017 23:11 #92881
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
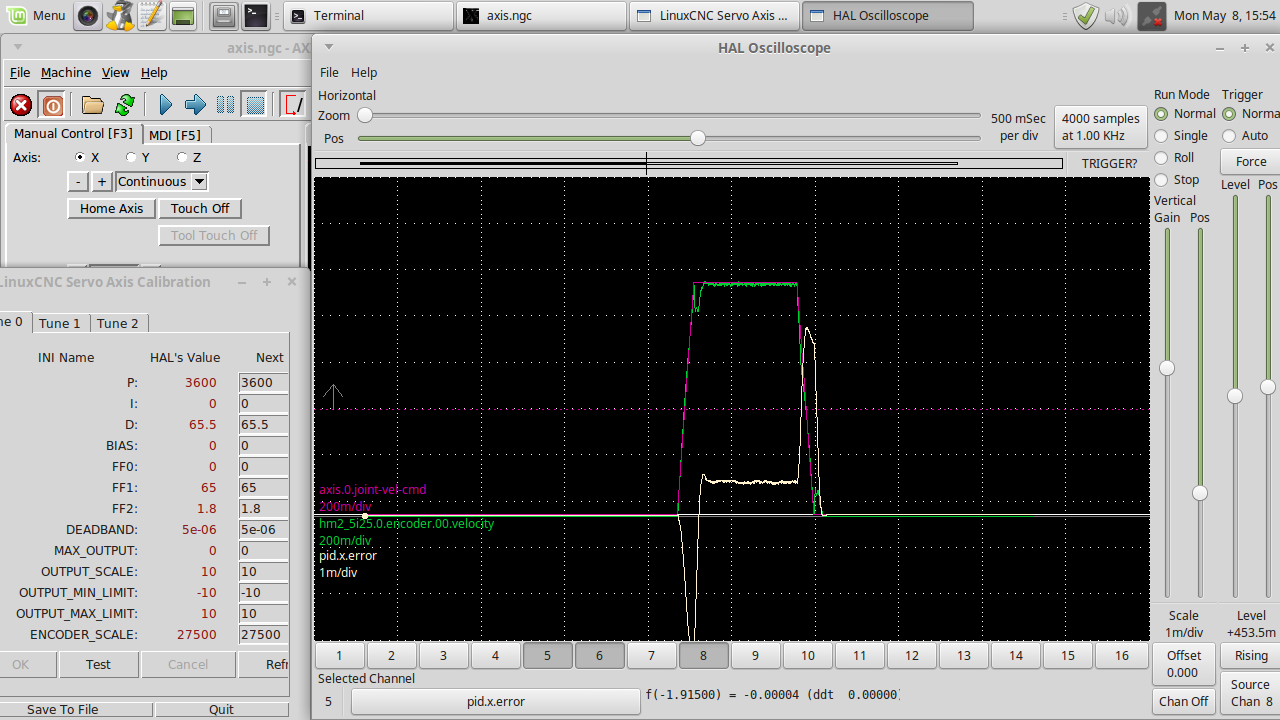
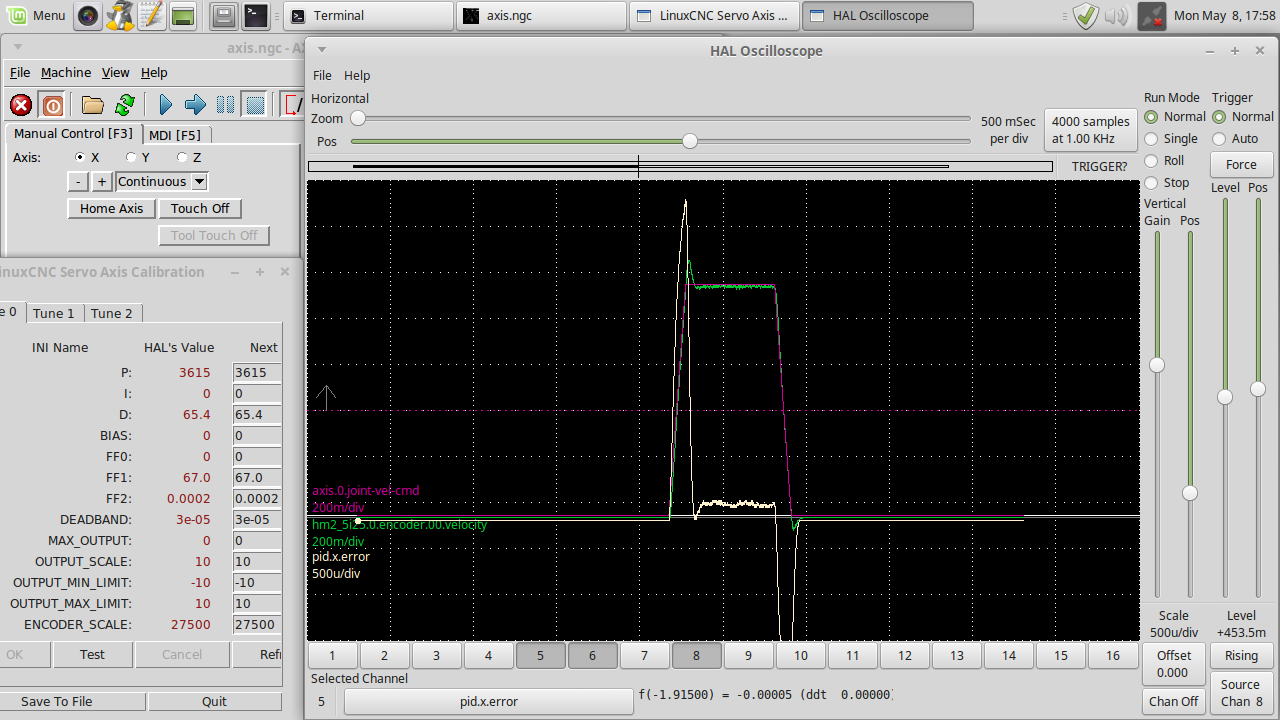
Many thanks!
Attached are a few pics of hal trace after ini file max- vel go from 1.0 (in prior post) to 1.5 and then to 2.0, read file name.
Edit: This is the best f.error setting,(the gain is set very high!) : forum.linuxcnc.org/media/kunena/attachme...00003_2017-05-08.png
The f.error is lower than ever!
Many, many thanks!
Attached are a few pics of hal trace after ini file max- vel go from 1.0 (in prior post) to 1.5 and then to 2.0, read file name.
Edit: This is the best f.error setting,(the gain is set very high!) : forum.linuxcnc.org/media/kunena/attachme...00003_2017-05-08.png
The f.error is lower than ever!
Many, many thanks!
Last edit: 08 May 2017 23:11 by new2linux.
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
09 May 2017 12:26 #92914
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Thanks to Todd, Andy, tommylight and lakeweb for your kindly help!
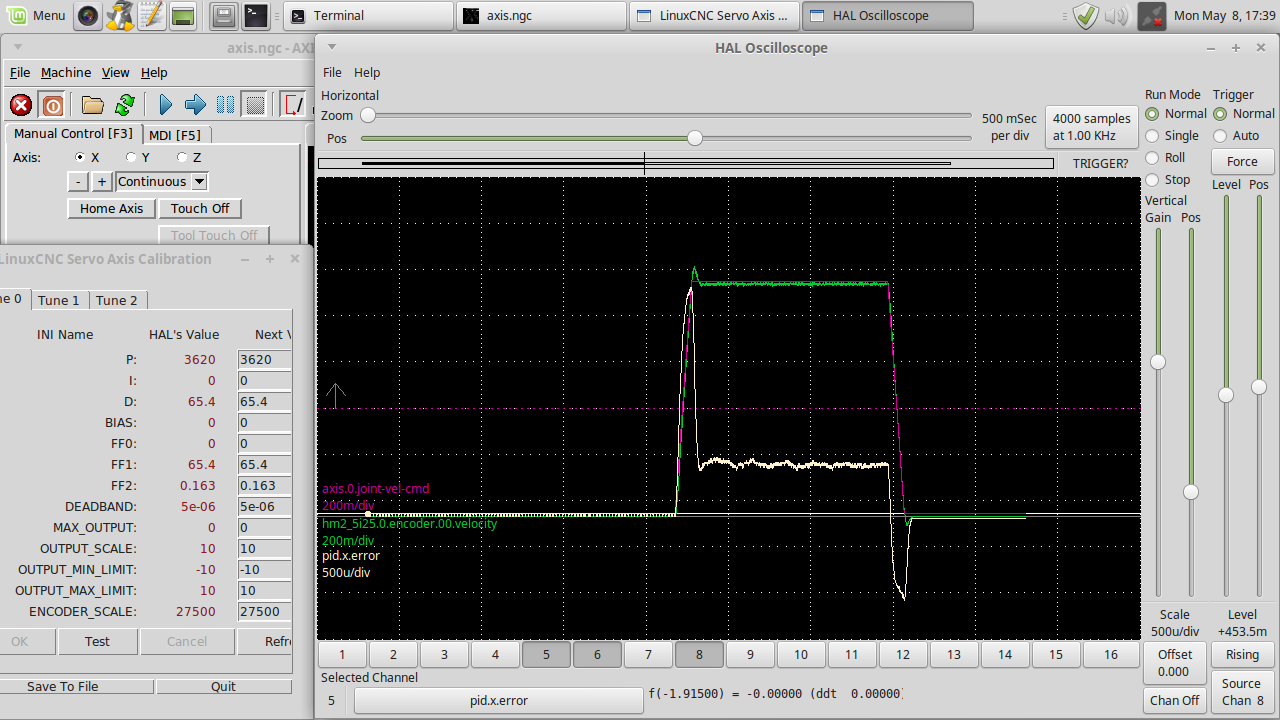
This is the lowest hal scope trace of the f.error value, notice the gain is set lower than the other hal trace so far. I am very thankful to all, that make this place happen!
many thanks
This is the lowest hal scope trace of the f.error value, notice the gain is set lower than the other hal trace so far. I am very thankful to all, that make this place happen!
many thanks
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
09 May 2017 12:42 #92918
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
In this image forum.linuxcnc.org/media/kunena/attachme...iniacc10.0vel1.0.png you were able to invert the following error spike during acceleration. This tells us that you should be able to almost completely zero it out by finding just the right amount of FF2 to apply.
It looks like you will eventually find a very well tuned set up. Don't be afraid to experiment with higher maximum velocities. You may find that you can achieve as high or maybe even slightly higher rapid travel rates than you had with the original control. The limit will be the maximum voltage of your servo power supply. The limit for your max acceleration is the maximum current your servo drives can supply. It is probably best to leave a little headroom here because under load the current needed will be higher (In other words, it won't be able to accelerate as fast under load.)
It looks like you will eventually find a very well tuned set up. Don't be afraid to experiment with higher maximum velocities. You may find that you can achieve as high or maybe even slightly higher rapid travel rates than you had with the original control. The limit will be the maximum voltage of your servo power supply. The limit for your max acceleration is the maximum current your servo drives can supply. It is probably best to leave a little headroom here because under load the current needed will be higher (In other words, it won't be able to accelerate as fast under load.)
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
11 May 2017 13:04 #93023
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Todd, many thanks for all your help!
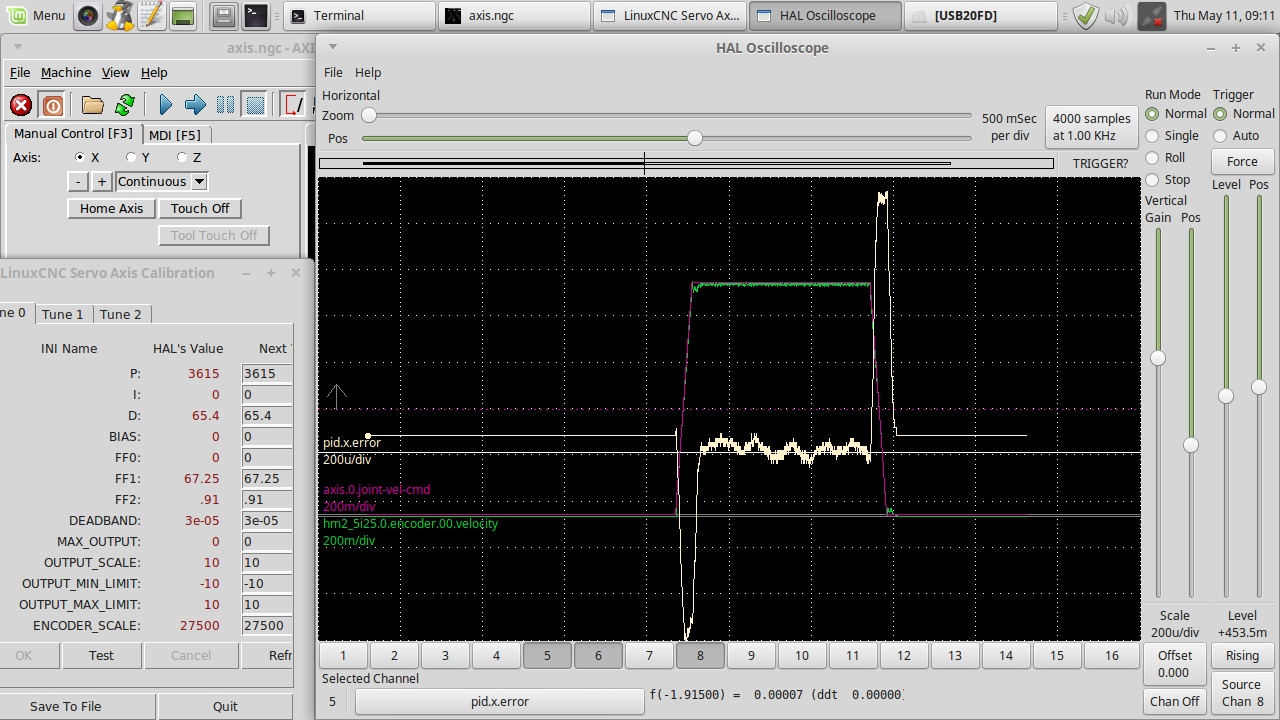
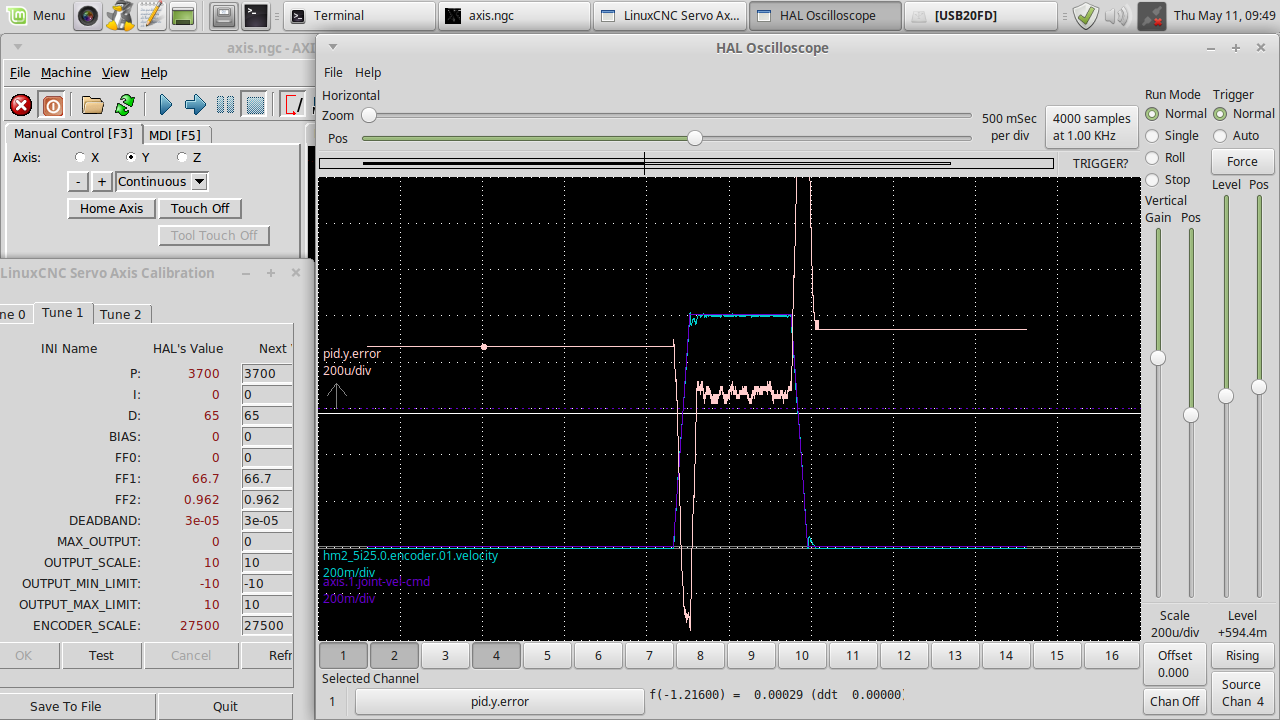
Attached are a few pics of the best yet of x and y axes traces. The max acceleration helped a great deal, will post .ini file next time. How do the axes trace look, both are the same "gain" scale, the f.error I can move/shift the 0.0 of the trace, but not having a lot of luck reducing the spike. The trace will vary about 1/10th of the scale w/o changing any settings, just push jog again.
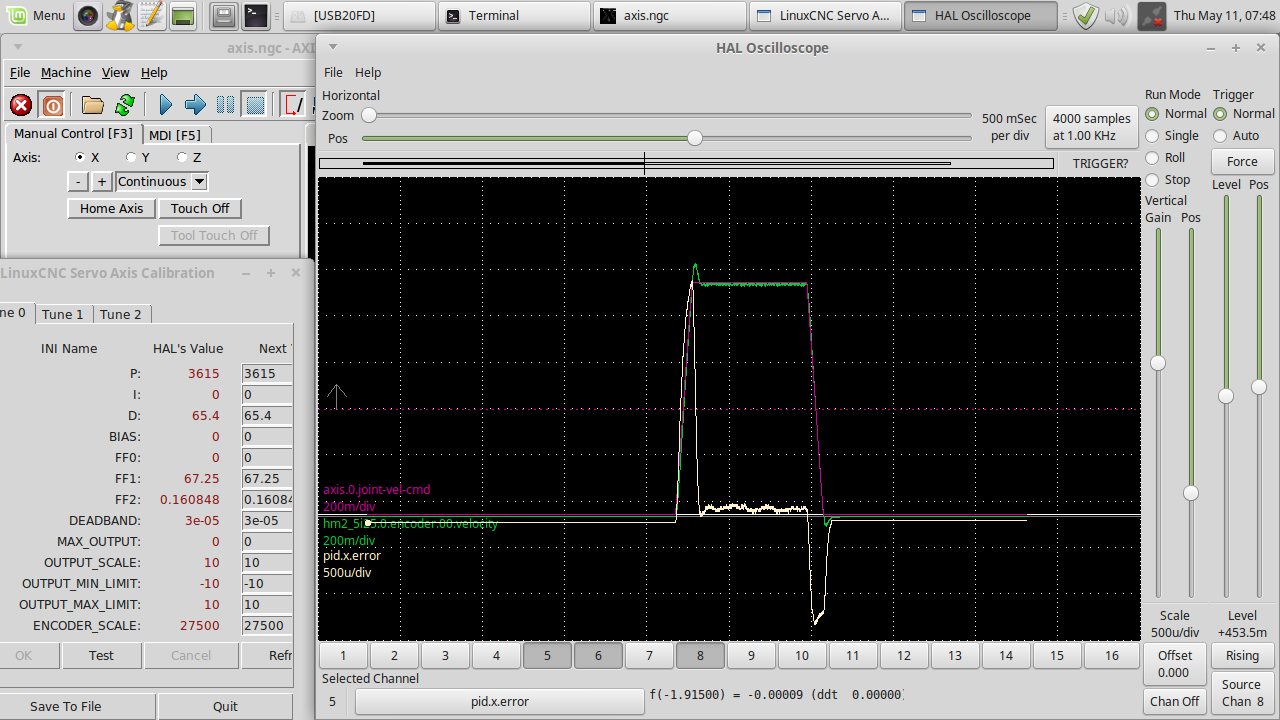
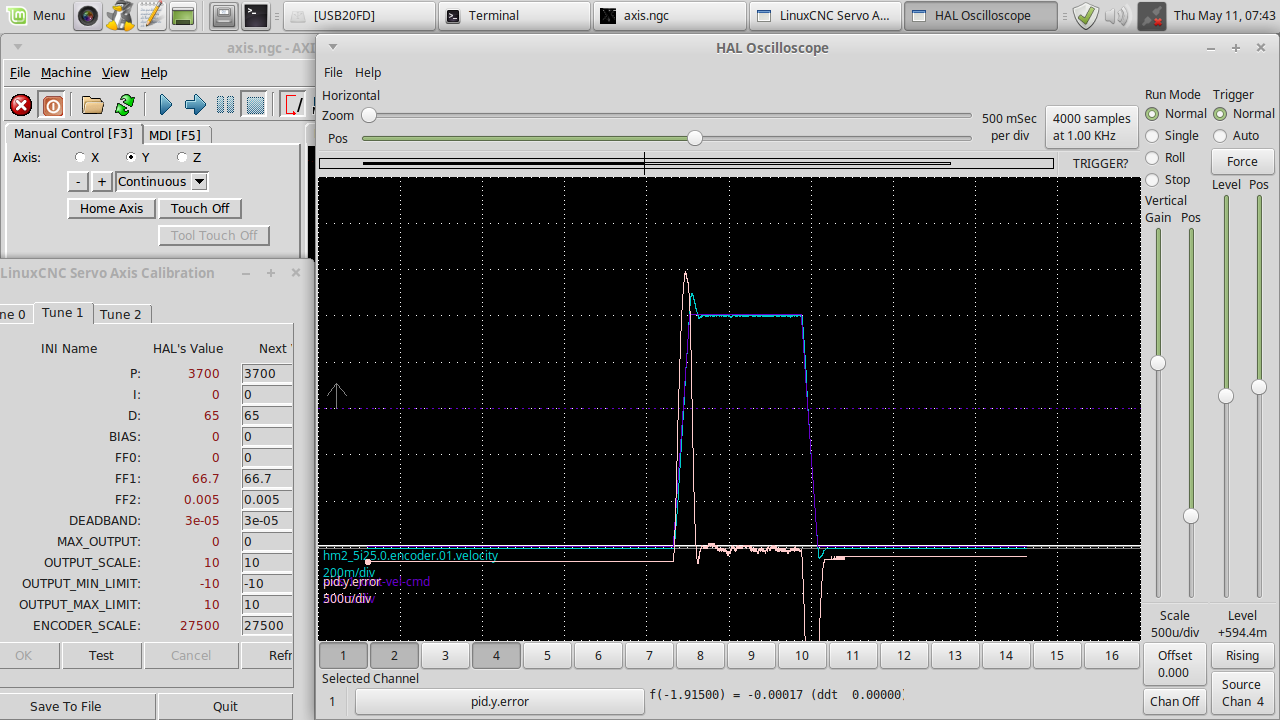
Many thanks! Your comments/suggestions are warmly welcomed.
Attached are a few pics of the best yet of x and y axes traces. The max acceleration helped a great deal, will post .ini file next time. How do the axes trace look, both are the same "gain" scale, the f.error I can move/shift the 0.0 of the trace, but not having a lot of luck reducing the spike. The trace will vary about 1/10th of the scale w/o changing any settings, just push jog again.
Many thanks! Your comments/suggestions are warmly welcomed.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
11 May 2017 13:18 #93024
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
What happens to the spike, with FF2 set to about 1 for the X axis and about 0.1 for the Y?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
11 May 2017 15:02 - 11 May 2017 15:05 #93027
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
thanks, Todd!
Attached are several pics of the x and y axes hal scope trace. I inserted the lowest f.error trace below: The other screenshots are of the FF2 as per your request.
Many thanks!
Edit: the "gain" was changed in some of the screenshots, beware.
Attached are several pics of the x and y axes hal scope trace. I inserted the lowest f.error trace below: The other screenshots are of the FF2 as per your request.
Many thanks!
Edit: the "gain" was changed in some of the screenshots, beware.
Last edit: 11 May 2017 15:05 by new2linux. Reason: clearify
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Time to create page: 0.407 seconds