- Hardware & Machines
- Computers and Hardware
- Remora - Rpi Software Stepping Using External Microcontroller via SPI
Remora - Rpi Software Stepping Using External Microcontroller via SPI
- scotta
-

- Offline
- Platinum Member
-

- Posts: 959
- Thank you received: 489
So i didn't realize the step limitation of remora I thought the LPC could do 100k+.
My setup uses 1204 ballscreaws and 1/16 micro steps = 800Steps Per MM, I have a 30k rpm spindle and can cut @ 2000mm/m. based on the above 20khz limitation it will only drive it at a max of 1500mm per, is this correct?
Hi, your calculations are correct. To get your 2000mm/min you would need a base thread frequency >55khz. Worth a try but you would need to update the configs and compile the Remora component and firmware to test. As long as the base thread can execute and have some free time for other threads within the thread period it should work.
BR
Scott
Please Log in or Create an account to join the conversation.
- Bari
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
- Posts: 639
- Thank you received: 234
www.nxp.com/products/processors-and-micr...ackage:LPC1768FBD100
We should be able to fix this using STM32.
Please Log in or Create an account to join the conversation.
- Cncninja
- Offline
- Premium Member
-

- Posts: 109
- Thank you received: 2
Attachments:
Please Log in or Create an account to join the conversation.
- Cncninja
- Offline
- Premium Member
-
- Posts: 109
- Thank you received: 2
Please Log in or Create an account to join the conversation.
- Cncninja
- Offline
- Premium Member
-
- Posts: 109
- Thank you received: 2
forum.pjrc.com/threads/61622-Teensy-4-1-Based-CNC-Controller
Please Log in or Create an account to join the conversation.
- Bari
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 639
- Thank you received: 234
Just a suggestion, you are free to run around the room and scream if you wish
")
Please Log in or Create an account to join the conversation.
- Cncninja
- Offline
- Premium Member
-
- Posts: 109
- Thank you received: 2
Please Log in or Create an account to join the conversation.
- cakeslob
- Offline
- Platinum Member
-
- Posts: 926
- Thank you received: 278
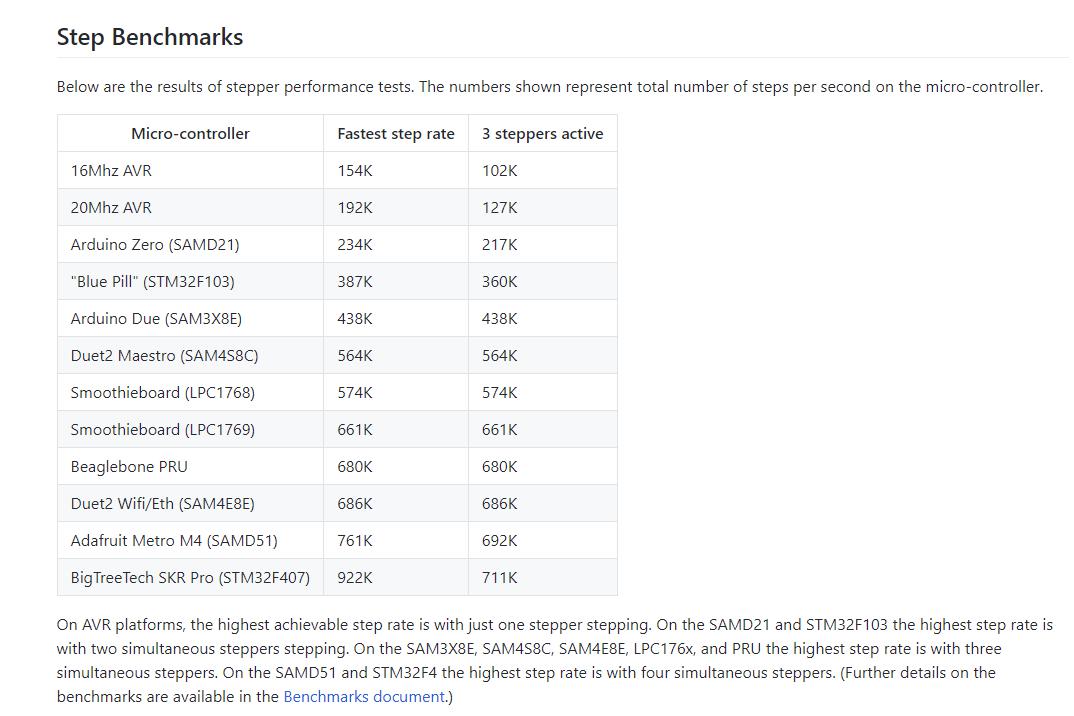
scotta explains the steprate limitation on the previous page
2. The Base Thread, which the step generator runs in, runs by default at 40khz. For a step on and off this takes two cycles so the fastest theoretically is 20khz. Below is a trace of both threads. There is some idle cpu time, but how fast do we need to go. On a typical 3D printer setup this is > 200mm sec.
At these higher speeds your setup needs to be done well to avoid following errors. ie stepgen acceleration set appropriately , joint velocity > max velocity so that the joint can actually make up any following error. Marlin and other firmwares don't monitor the actual step generation and just push out pulses. Remora does, so the configuration needs to be such to allow the control loop to do its job.
I think the grblhal thing is more about being inspired by linuxcnc hal implementation for making it easier to port for all the different supported boards , because its firmware has a lot more going on like the kinmatics/interp/planner. I think the 3d printer software klipper is more like what we want for linuxcnc as it seems to operate the same way with an spi link to the pi to offload stepgen to the microcontrollers if my understanding is correct.
what resolution is that screen you are using? 1080*640?This is the beginning of my stand alone controller
Also picked up a SKR 2.0 with the stm32f407, its almost identical to the skr 1.4, except for a few revisions and the stm32. it would appear this is meant to be a replacement for the skr 1.4 probably related to the chip shortage, as board layout, size and mounting holes are all in the same location.
Please Log in or Create an account to join the conversation.
- scotta
-
- Offline
- Platinum Member
-
- Posts: 959
- Thank you received: 489
LPC17XX can do much faster step rates ??? where is the bottleneck. What's the point of 25khz the built-in I/O of the RPI can do that.
Hi, for clarity. Remora uses software step generation using a DDS accumulator, the same logic that the standard LinuxCNC step generator uses. Please don't compare to firmwares that utilise hardware PWM that have no feedback into the control loop. Remora, like the standard Stepgen monitors every step produced (physical lost steps require encoder feedback) and adjusts step frequency to minimise follow error.
For my 3D printer application 250mm is more than adequate, and as another member said. Do you really need the resolution of 16 micro stepping?
Please Log in or Create an account to join the conversation.
- scotta
-
- Offline
- Platinum Member
-
- Posts: 959
- Thank you received: 489
Since Rommel shared his STM32 port I have been tempted to have a crack at this. I've now got a BTT SKR v2 with the STM32F407 on the way. 168Mhz is attractive to start testing speeds but how fast do we really need...Can't the LPC17xx handle higher real time thread rates? OH! Maybe not , only 100/120 MHZ ARM core.
www.nxp.com/products/processors-and-micr...ackage:LPC1768FBD100
We should be able to fix this using STM32.
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- Remora - Rpi Software Stepping Using External Microcontroller via SPI