Bridgeport Torq Cut 22 Retrofit
- tommylight
-

- Away
- Moderator
-

- Posts: 21708
- Thank you received: 7417
./my_LinuxCNC_machine.hal:30: parameter or pin 'hm2_7i92.0.dpll.01.timer-us' not foundPlease Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-

- Posts: 335
- Thank you received: 59
I erased that and then got a similar error for stepgen timer and also deleted that in hal. Both of those seemed important. Any reason they would be generated in pncconf but not actually needed?
I now have the GUI up. Time to start connecting things and testing operations.
Please Log in or Create an account to join the conversation.
- bevins
-

- Offline
- Platinum Member
-
- Posts: 1942
- Thank you received: 338
Thank you.
I erased that and then got a similar error for stepgen timer and also deleted that in hal. Both of those seemed important. Any reason they would be generated in pncconf but not actually needed?
I now have the GUI up. Time to start connecting things and testing operations.
Nice choice on the DYN4 stuff. I just used 4 of those 750 AC servo and drives with planetary gearboxes. Unbelievably smooth.
Easy to setup.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-
- Posts: 17966
- Thank you received: 5268
Thank you.
I erased that and then got a similar error for stepgen timer and also deleted that in hal. Both of those seemed important. Any reason they would be generated in pncconf but not actually needed?
I now have the GUI up. Time to start connecting things and testing operations.
What firmware are you using? it really should have the DPLL though I know there are some
older bitfiles that lack the DPLL
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
- Posts: 335
- Thank you received: 59
Nice choice on the DYN4 stuff. I just used 4 of those 750 AC servo and drives with planetary gearboxes. Unbelievably smooth.
Easy to setup.
Interesting you should say that. I was having some issues setting up the DYN4 servos. I got things moving but in tuning I could never get it past making a chug/lurch motion at all speeds and PID settings in speed/velocity mode.
I ran the DMM auto tune and was really surprised with how easy the motors could be forced to turn by hand when enables. Running from the DMM software in position mode the servos were stiff, made no noise and would position great. Once the auto tune was complete and the setting switched to speed/velocity mode you could hear and see the difference as the Z axis made a slow roll to the table.
Here is a pic of the DMM servo menu:

I messed around all day with different settings in the drive and finally found that if I moved the drive acceleration way up they worked fine and smooth, responding to the controllers PID. I had not messed with the accel setting because the manual said it resets to 12 at power off. Fortunately the setting would save higher than 12 and I was able to start tuning.
I put everything to zero and moved the P up. In earlier testing (pre finding out the accel issue) I was able to move P up until I got a visible bounce and then back it off. Now I have been able to get P well past that original setting and I believe what I am seeing is a very small oscillation before the axis comes to a stop. Here are some pictures of the HAL scope at P100, 200, 300, 400 I think around P170 I get the single over shoot when I stop. Trying to make sense of it all.
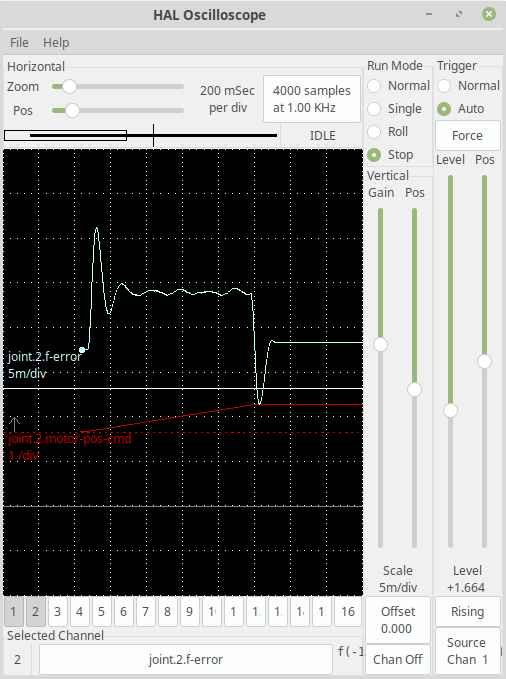
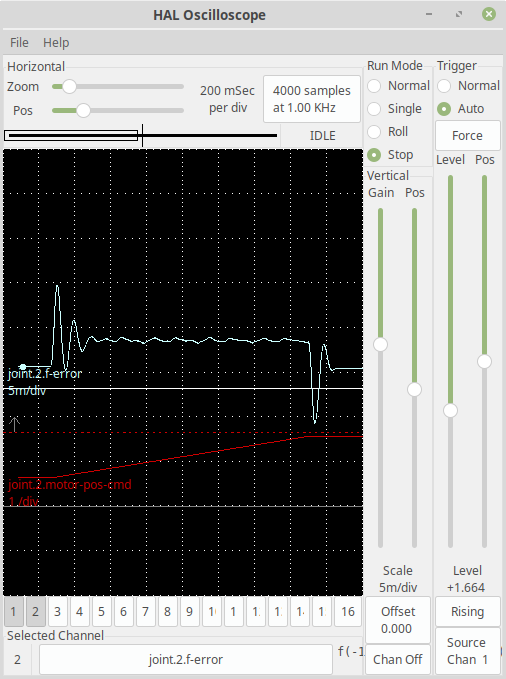
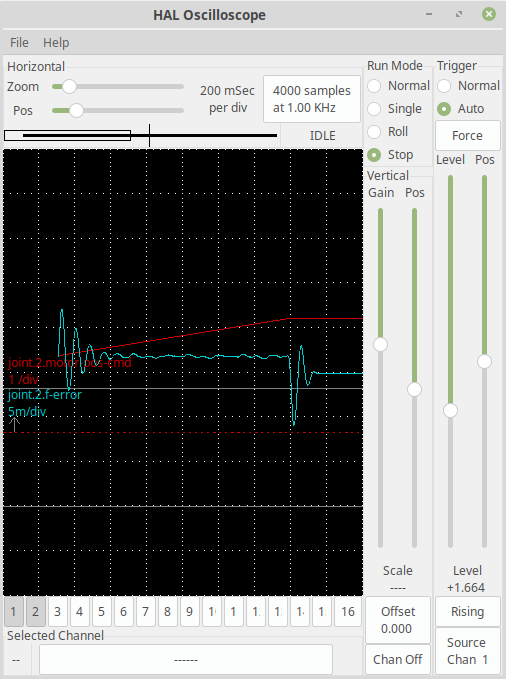
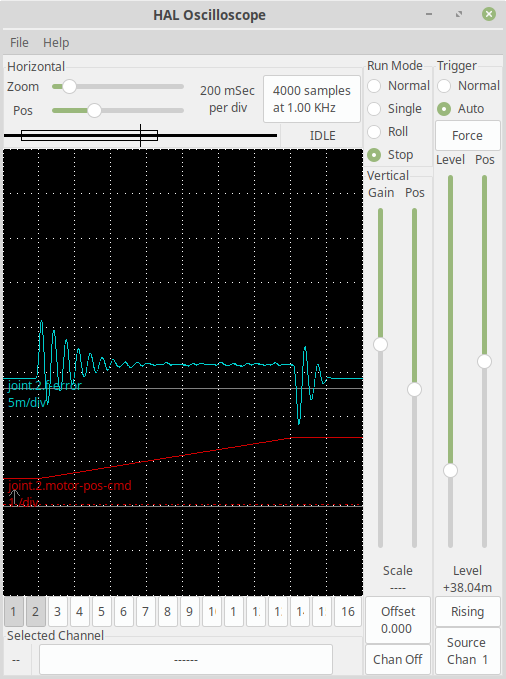
Attachments:
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
- Posts: 335
- Thank you received: 59
What firmware are you using? it really should have the DPLL though I know there are some
older bitfiles that lack the DPLL
I downloaded the 7i92.zip and used the 7i92_7i77x2.bit with file date in 2015. I am also not getting a signal (red LED is on) to my 7i84 for some reason but was going to cross that bridge later.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
- Posts: 17966
- Thank you received: 5268
Your tuning looks like you have not set FF1 correctly (constant error at cruise)
and perhaps have faster acceleration than your drives can handle.
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
- Posts: 335
- Thank you received: 59
My output scale on this axis is 9.84 (-output, -min, max). My acceleration was set to whatever came up in pncconf. I believe it is 30in/sec2.
I was having a lot of issues with the axis drive after auto tune and messing with the parameters to try and get smooth motion. I was able to get a decent tune that stayed within f error=1 up to 300 ipm but not higher than that. Settings were around P450 FF1=1 FF2=.045
This being my first machine with rapids this high, after seeing that much mass move that fast I am rethinking the wisdom of it all.
Also I originally was adjusting P by jogging at 4ipm and moved up to 40ipm for the hal scope pictured. Any suggestions on speeds to sue for tuning?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
- Posts: 17966
- Thank you received: 5268
(FF1 = 1.0 only works if the output scale is exactly right)
You should be able to null the error at a constant velocity
by adjusting FF1
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-
- Posts: 335
- Thank you received: 59
Please Log in or Create an account to join the conversation.