Lichuan 4 axis stepper need help-
- NWE
-

- Away
- Elite Member
-

Less
More
- Posts: 219
- Thank you received: 67
06 Feb 2026 06:01 #342525
by NWE
Replied by NWE on topic Lichuan 4 axis stepper need help-
Lichuan promptly (as in 'same day') responded to my request for manual and software. They're shared here:
git.gitcoding.net/nwe/lcec_4x_stepper.git
git.gitcoding.net/nwe/lcec_4x_stepper.git
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
06 Feb 2026 06:40 #342527
by Hakan
Replied by Hakan on topic Lichuan 4 axis stepper need help-
Awesome! Rony didn't come back to me.
Please Log in or Create an account to join the conversation.
- NWE
-
- Away
- Elite Member
-
Less
More
- Posts: 219
- Thank you received: 67
06 Feb 2026 08:01 - 06 Feb 2026 08:04 #342532
by NWE
Replied by NWE on topic Lichuan 4 axis stepper need help-
Here is what I managed to squeeze out for velocity. It seems 10000 set 60rpm so I must have had them at 3000rpm. They were really squealing. If I bumped it up to 600000 they stalled and sat there squealing.
>halcmd: setp lcec.0.0.0-target-velocity 500000
In the process of trying this, I made an interesting observation: I knew my 24V 5A psu is too small and will lose out at some point. It tripped about 2-4 seconds after I changed the 4th motor from target-velocity 0 to target-velocity 500000. All 4 motors stalled and the drive's LED's blanked. The psu reset, the drive lit up, then a few seconds later, all 4 motors resumed full speed. This cycle continued about twice, then I stopped two motors.
I checked dmesg, sure enough, it showed ethercat had come and gone several times.
The fascinating part is the way the drive remembered its previous state after a power droop. I have this running in velocity mode. Position mode 8 would hardly be affected by the following scenario: I envision the potential of a power droop stopping the pc then moments later the servos continue in their most recent trajectory, meanwhile the pc slowly boots... I guess on machinery where this would matter, the e-stop ciruit would also release, preventing anything from moving uncontrolled.
Earlier today I disassebled this drive and discovered it appears the encoder feedback part of the pcb is fully populated except for the connectors. I will try to connect an encoder and try to activate that... see if I get counts in velocity mode.
One more observation I made while I had it apart: the pcb is conformal coated - a sure sign of decent quality!
>halcmd: setp lcec.0.0.0-target-velocity 500000
In the process of trying this, I made an interesting observation: I knew my 24V 5A psu is too small and will lose out at some point. It tripped about 2-4 seconds after I changed the 4th motor from target-velocity 0 to target-velocity 500000. All 4 motors stalled and the drive's LED's blanked. The psu reset, the drive lit up, then a few seconds later, all 4 motors resumed full speed. This cycle continued about twice, then I stopped two motors.
I checked dmesg, sure enough, it showed ethercat had come and gone several times.
The fascinating part is the way the drive remembered its previous state after a power droop. I have this running in velocity mode. Position mode 8 would hardly be affected by the following scenario: I envision the potential of a power droop stopping the pc then moments later the servos continue in their most recent trajectory, meanwhile the pc slowly boots... I guess on machinery where this would matter, the e-stop ciruit would also release, preventing anything from moving uncontrolled.
Earlier today I disassebled this drive and discovered it appears the encoder feedback part of the pcb is fully populated except for the connectors. I will try to connect an encoder and try to activate that... see if I get counts in velocity mode.
One more observation I made while I had it apart: the pcb is conformal coated - a sure sign of decent quality!
Last edit: 06 Feb 2026 08:04 by NWE.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
06 Feb 2026 08:13 #342534
by Hakan
Replied by Hakan on topic Lichuan 4 axis stepper need help-
It can be that the motor speed needs to be ramped up, like it is by linuxcnc.
Setting 6000 rpm as a step is quite challenging.
Anyway, 3000 rpm is more than decent for a stepper motor.
Consider to use csp mode, that's what most people do.
The position feedback is lagging two servo cycles when using ethercat
and a velocity loop has a hard time.
If you use csp, the position update will stop in your scenario, and the motors will stop.
Check out the SDO listing, there is a max current setting (per motor).
Setting 6000 rpm as a step is quite challenging.
Anyway, 3000 rpm is more than decent for a stepper motor.
Consider to use csp mode, that's what most people do.
The position feedback is lagging two servo cycles when using ethercat
and a velocity loop has a hard time.
If you use csp, the position update will stop in your scenario, and the motors will stop.
Check out the SDO listing, there is a max current setting (per motor).
The following user(s) said Thank You: NWE
Please Log in or Create an account to join the conversation.
- rodw
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 12007
- Thank you received: 4089
06 Feb 2026 12:17 #342542
by rodw
Its interesting your feedback about motor performance. I di wonder about how I would go not using Lichuan motors. 3000 rpm is up where I was expecting!
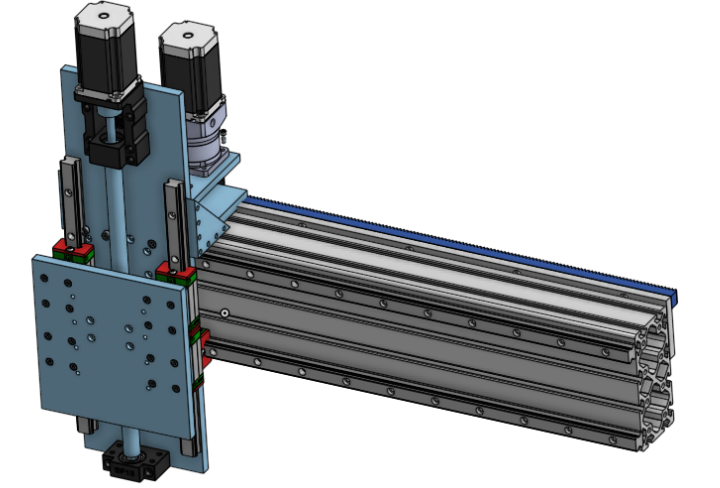
I've had a change of pace and been doing some CAD cos I gotta use these things! Slowly coming together with a scrap of gear rack I had lying around.
Replied by rodw on topic Lichuan 4 axis stepper need help-
If you are going shopping for power supplies, Lichuan recommend to use 36 volts. I bought a nice little 5 amp din rail mount one which will do my 2 amp motors.. I meant to get 36 volts but force of habit I bought 48v!It can be that the motor speed needs to be ramped up, like it is by linuxcnc.
Setting 6000 rpm as a step is quite challenging.
Anyway, 3000 rpm is more than decent for a stepper motor.
Consider to use csp mode, that's what most people do.
The position feedback is lagging two servo cycles when using ethercat
and a velocity loop has a hard time.
If you use csp, the position update will stop in your scenario, and the motors will stop.
Check out the SDO listing, there is a max current setting (per motor).
Its interesting your feedback about motor performance. I di wonder about how I would go not using Lichuan motors. 3000 rpm is up where I was expecting!
I've had a change of pace and been doing some CAD cos I gotta use these things! Slowly coming together with a scrap of gear rack I had lying around.
Attachments:
The following user(s) said Thank You: NWE
Please Log in or Create an account to join the conversation.
- NWE
-
- Away
- Elite Member
-
Less
More
- Posts: 219
- Thank you received: 67
06 Feb 2026 15:12 #342549
by NWE
Higher inductance motors need higher voltage to produce the same speed and torque. This is the first thing that comes to mind, seeing what these motors can do.
Frankly, I'm quite impressed I got this kind of speed out of them. They must have relatively low phase inductance. They're labelled hybrid stepper motors. I'll hazard a guess they're wound to similar specs as a BLDC motor, but in 2 phase configuration. Its been a while since I messed with steppers, the ones I previously used would never have got this speed on 24V, hardly even at 48V.
Replied by NWE on topic Lichuan 4 axis stepper need help-
I know the motor's phase inductance or voltage rating can make a huge difference in top speed attainable. These motors do not have either of those specs listed, making it harder to compare specs, but when I get a chance, I'll try to measure phase inductance.Its interesting your feedback about motor performance. I di wonder about how I would go not using Lichuan motors. 3000 rpm is up where I was expecting!
Higher inductance motors need higher voltage to produce the same speed and torque. This is the first thing that comes to mind, seeing what these motors can do.
Frankly, I'm quite impressed I got this kind of speed out of them. They must have relatively low phase inductance. They're labelled hybrid stepper motors. I'll hazard a guess they're wound to similar specs as a BLDC motor, but in 2 phase configuration. Its been a while since I messed with steppers, the ones I previously used would never have got this speed on 24V, hardly even at 48V.
Please Log in or Create an account to join the conversation.
- NWE
-
- Away
- Elite Member
-
Less
More
- Posts: 219
- Thank you received: 67
06 Feb 2026 15:44 #342550
by NWE
>needs to be ramped up...
Yes, another detail I failed to remark on: I noticed when operating in opmode 9 this drive uses a sane accel/decel rate, which kind of surprised me.
I can change target velocity in big jumps and it ramps smoothly to my target velocity. But if I set controlword = 6, the addressed motor stops BAM!
If I set target velocity first, then controlword = 15, it does not move. I changed target velocity to 0 then to 10000 then it started. Didn't check whether I actually had to set target velocity = 0 first.
As far as I can tell, in opmode 8, it behaves as you described. If I set position in any size of small or big jump, it tries to move there instantaneously. Small jumps move the motor, big jumps just make a "chirp".
>If you use csp,
Good idea. I just had to play with my new toy.

Replied by NWE on topic Lichuan 4 axis stepper need help-
If I got my math correct, target velocity 500000 = 3000rpm, target velocity 600000 = 3600rpmIt can be that the motor speed needs to be ramped up, like it is by linuxcnc.
Setting 6000 rpm as a step is quite challenging.
Anyway, 3000 rpm is more than decent for a stepper motor.
Consider to use csp mode, that's what most people do.
The position feedback is lagging two servo cycles when using ethercat
and a velocity loop has a hard time.
If you use csp, the position update will stop in your scenario, and the motors will stop.
Check out the SDO listing, there is a max current setting (per motor).
>needs to be ramped up...
Yes, another detail I failed to remark on: I noticed when operating in opmode 9 this drive uses a sane accel/decel rate, which kind of surprised me.
I can change target velocity in big jumps and it ramps smoothly to my target velocity. But if I set controlword = 6, the addressed motor stops BAM!
If I set target velocity first, then controlword = 15, it does not move. I changed target velocity to 0 then to 10000 then it started. Didn't check whether I actually had to set target velocity = 0 first.
As far as I can tell, in opmode 8, it behaves as you described. If I set position in any size of small or big jump, it tries to move there instantaneously. Small jumps move the motor, big jumps just make a "chirp".
>If you use csp,
Good idea. I just had to play with my new toy.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 12007
- Thank you received: 4089
06 Feb 2026 19:52 #342563
by rodw
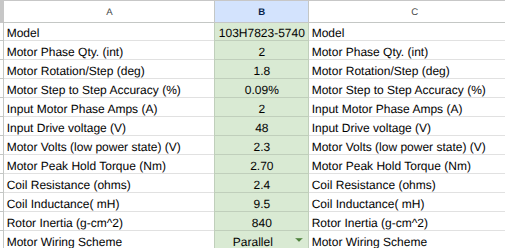
If you can find these specs, mainly inductance, I'll run it over your drive.
I ran countless NEMA 23,24 and 34 motors through this model.
I then validated his model by replacing motors on my plasma table with those that passed the spreadsheet test.
After testing countless motors, For all that is said about low inductance, We busted that myth. Some of the better performing motors had quite high inductance. Rotor inertia seemed to be more imortant.
Some failed because they needed too much voltage (beyond what you could buy a power supply for,
Others failed because they drew to much current (above the motors rated amps),
And some failed because the estimated ambiant temperature eise would have melted the wiring (which is usually rated at about 130 deg C)
This particular Sanyo Denki has insanely high rotor inertia and weighs accordingly! I speculated that the reason this was limited to 2 amps was because there simply wasn't enough room left in the drive for heavier wire! On my plasma table X axis, I achieved 60000 mm/min rapids and 8000 mm/s/s acceleration with a 30mm dia pinion and 3:1 gearing. I paid about $20 AUD per drive on eBay and another $10 for the wiring harness. After this testing, I saw the guy had a few left and bought the lot. the RRP of the drives is still around AUD $250. They run silently as smooth as silk.
So I had a few left and thought I'd better use them. I have some DM542a stepper drives here I could have used but my pc doesn't have a parallel port so by the time I bought a card and breakouts or even a Chinese 7i92, I might as well buy a multiaxis Ethercat drive.
Anyway, that's why I am here. My next step is to check I have phase polarity correct. I have a feeling I might have changed something early in the piece trying to get things to work because I know these drives deliver.
Replied by rodw on topic Lichuan 4 axis stepper need help-
During COVID, I worked with Marshall, a US engineer as we were going to design a plasma table together. He (mostly) and I (the tester) developed an insanely comprehensive spreadsheet model that benchmarks a stepper drive for current consumption, voltage requirement ambiant heat generation. We wanted to utilize stepper motors insane low down torque for acceleration which we thought trunped a geared down servo (which is a lot easier to design for).
I know the motor's phase inductance or voltage rating can make a huge difference in top speed attainable. These motors do not have either of those specs listed, making it harder to compare specs, but when I get a chance, I'll try to measure phase inductance.
Higher inductance motors need higher voltage to produce the same speed and torque. This is the first thing that comes to mind, seeing what these motors can do.
sed with steppers, the ones I previously used would never have got this speed on 24V, hardly even at 48V.
If you can find these specs, mainly inductance, I'll run it over your drive.
I ran countless NEMA 23,24 and 34 motors through this model.
I then validated his model by replacing motors on my plasma table with those that passed the spreadsheet test.
After testing countless motors, For all that is said about low inductance, We busted that myth. Some of the better performing motors had quite high inductance. Rotor inertia seemed to be more imortant.
Some failed because they needed too much voltage (beyond what you could buy a power supply for,
Others failed because they drew to much current (above the motors rated amps),
And some failed because the estimated ambiant temperature eise would have melted the wiring (which is usually rated at about 130 deg C)
This particular Sanyo Denki has insanely high rotor inertia and weighs accordingly! I speculated that the reason this was limited to 2 amps was because there simply wasn't enough room left in the drive for heavier wire! On my plasma table X axis, I achieved 60000 mm/min rapids and 8000 mm/s/s acceleration with a 30mm dia pinion and 3:1 gearing. I paid about $20 AUD per drive on eBay and another $10 for the wiring harness. After this testing, I saw the guy had a few left and bought the lot. the RRP of the drives is still around AUD $250. They run silently as smooth as silk.
So I had a few left and thought I'd better use them. I have some DM542a stepper drives here I could have used but my pc doesn't have a parallel port so by the time I bought a card and breakouts or even a Chinese 7i92, I might as well buy a multiaxis Ethercat drive.
Anyway, that's why I am here. My next step is to check I have phase polarity correct. I have a feeling I might have changed something early in the piece trying to get things to work because I know these drives deliver.
Attachments:
The following user(s) said Thank You: NWE
Please Log in or Create an account to join the conversation.
- NWE
-
- Away
- Elite Member
-
Less
More
- Posts: 219
- Thank you received: 67
06 Feb 2026 22:02 #342574
by NWE
Replied by NWE on topic Lichuan 4 axis stepper need help-
I found some specs for my LC60HS112 motors in the catalog:
model: LC60HS112
step angle 1.8
holding torque 4.0NM
rated current 4.0A
phase resistance 1.56 ohms
phase inductance 3.9 mH
rotor inertia 1200 g.cm2
motor weight 1.807 Kg
shaft dia. 8mm
Here are details on my motors that don't match the above catalog specs to some degree:
motor weight 1.79 Kg
shaft dia. 10mm
I messaged Lichuan to see what they say.
model: LC60HS112
step angle 1.8
holding torque 4.0NM
rated current 4.0A
phase resistance 1.56 ohms
phase inductance 3.9 mH
rotor inertia 1200 g.cm2
motor weight 1.807 Kg
shaft dia. 8mm
Here are details on my motors that don't match the above catalog specs to some degree:
motor weight 1.79 Kg
shaft dia. 10mm
I messaged Lichuan to see what they say.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 12007
- Thank you received: 4089
07 Feb 2026 04:11 #342582
by rodw
Replied by rodw on topic Lichuan 4 axis stepper need help-
There you go. I've spent a few hours today updating this to add cutting forces as it was initially built for plasma table design.I don't know what kind of machine you are planning but I have put it beside my drive X (yours is Y, Z ignore.)This is based on the work energy method and assumes a 3 second cut with a 1% trapezoidal profile. eg 1% accel, (98%) cruising and 1% decell at a cut speed of 5000 m per minute. 150 N cutting forces. Assumes a 45mm dia pinion (40 tooth Mod 1.25 gear) with 5:1 gearbox they don't seem to make a 30mm (20 tooth) pinion for a 14mm dia output shast which is the normal one found on a planetary gearbox.It draws a trapezoid profile of the test cut.I almost left your power supply at 24 volts as it actually would do the job for those specs. I put a derating to 24v in and it shows no reduction. But it halves the available power to the same as my 2 amp motor @ 48v. So the sheet goes through all of the physical power and torque requirements
We calculate motor Average power and RMS power. I would use Average power with cutting forces. This number must be less than the available power lists further down
So we can see that your drive under these conditions only needs 2 amps RMS at 22 volts. Further up there is a magic ratio, the System to Rotor Inertia Ratio. It should be 1:1 but not exceed it. In your case, its massively oversized for my project. And so is mine but the price is right.
Finally, we calculate the ambient heat rise. It must not exceed the drive's rating which is usually around 130 deg C when the insulation could melt. SO you can see that is not an issue and that 100deg C is usually safe.
So all in all both motors simply idle and will never be called upon to exceed their available power at which point you could loose straps. SInsummary, they can run 24/7 without the risk of loosing position!
We calculate motor Average power and RMS power. I would use Average power with cutting forces. This number must be less than the available power lists further down
So we can see that your drive under these conditions only needs 2 amps RMS at 22 volts. Further up there is a magic ratio, the System to Rotor Inertia Ratio. It should be 1:1 but not exceed it. In your case, its massively oversized for my project. And so is mine but the price is right.
Finally, we calculate the ambient heat rise. It must not exceed the drive's rating which is usually around 130 deg C when the insulation could melt. SO you can see that is not an issue and that 100deg C is usually safe.
So all in all both motors simply idle and will never be called upon to exceed their available power at which point you could loose straps. SInsummary, they can run 24/7 without the risk of loosing position!
The following user(s) said Thank You: NWE
Please Log in or Create an account to join the conversation.
Time to create page: 0.306 seconds