Spindel problems in Gmoccapy
- tecno
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1850
- Thank you received: 127
28 Apr 2017 15:52 - 28 Apr 2017 15:53 #92279
by tecno
Replied by tecno on topic Spindel problems in Gmoccapy
Last edit: 28 Apr 2017 15:53 by tecno.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
28 Apr 2017 16:15 - 28 Apr 2017 16:21 #92281
by Todd Zuercher
Replied by Todd Zuercher on topic Spindel problems in Gmoccapy
You have 3 lines that are essentially trying to do the same thing twice.
These two lines
net spindle-index => encoder.0.phase-Z => encoder.0.phase-A
net spindle-index <= parport.0.pin-10-in
and this one line are functionally equivalent, except for the signal name.
net spindle_index parport.0.pin-10-in => encoder.0.phase-A => encoder.0.phase-Z
Here I've deleted the offending line and reconnected the original parallel port pin line.
These two lines
net spindle-index => encoder.0.phase-Z => encoder.0.phase-A
net spindle-index <= parport.0.pin-10-in
and this one line are functionally equivalent, except for the signal name.
net spindle_index parport.0.pin-10-in => encoder.0.phase-A => encoder.0.phase-Z
Here I've deleted the offending line and reconnected the original parallel port pin line.
# Generated by stepconf 1.1 at Mon Apr 17 15:16:45 2017
# If you make changes to this file, they will be
# overwritten when you run stepconf again
loadrt trivkins
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hal_parport cfg="0x378 out"
setp parport.0.reset-time 5000
loadrt stepgen step_type=0,0,0 ctrl_type=p,p,v
loadrt charge_pump
setp charge-pump.enable 1
net charge-pump <= charge-pump.out
loadrt encoder num_chan=1
loadrt scale count=1
loadrt near
net spindle-cmd-rpm => stepgen.2.velocity-cmd
setp stepgen.2.position-scale 0.9 #steps/RPM
setp stepgen.2.steplen 5000
setp stepgen.2.stepspace 5000
#setp stepgen.2.dirdelay 35000
setp stepgen.2.maxaccel 5000
addf parport.0.read base-thread
addf stepgen.make-pulses base-thread
addf charge-pump base-thread
addf parport.0.write base-thread
addf parport.0.reset base-thread
addf encoder.update-counters base-thread
addf encoder.capture-position servo-thread
addf scale.0 servo-thread
addf near.0 servo-thread
addf stepgen.capture-position servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf stepgen.update-freq servo-thread
net spindle-index => encoder.0.phase-Z => encoder.0.phase-A
net spindle-cmd-rpm <= motion.spindle-speed-out
net spindle-cmd-rpm-abs <= motion.spindle-speed-out-abs
net spindle-cmd-rps <= motion.spindle-speed-out-rps
net spindle-cmd-rps-abs <= motion.spindle-speed-out-rps-abs
net spindle-at-speed => motion.spindle-at-speed
net spindle-enable <= motion.spindle-on => stepgen.2.enable
net spindle-cw <= stepgen.2.step
net spindle-ccw <= stepgen.2.dir
#setp encoder.0.counter-mode 1
setp encoder.0.position-scale 1
setp encoder.0.counter-mode 1
setp encoder.0.x4-mode FALSE
setp scale.0.gain 60
setp near.0.scale 1.2
setp near.0.difference 10
net spindle-cmd => near.0.in1
net spindle-rpm => near.0.in2
net spindle-at-speed near.0.out => motion.spindle-at-speed
net coolant-flood <= iocontrol.0.coolant-flood
net xstep => parport.0.pin-02-out
setp parport.0.pin-02-out-reset 1
net xdir => parport.0.pin-03-out
#setp parport.0.pin-04-out-invert 1
net zstep => parport.0.pin-04-out
setp parport.0.pin-04-out-reset 1
setp parport.0.pin-05-out-invert 1
net zdir => parport.0.pin-05-out
net spindle-cw => parport.0.pin-06-out
net spindle-ccw => parport.0.pin-07-out
net coolant-flood => parport.0.pin-09-out
net charge-pump => parport.0.pin-14-out
net spindle-index <= parport.0.pin-10-in
net home-z <= parport.0.pin-11-in-not
net home-x <= parport.0.pin-12-in-not
net estop-ext <= parport.0.pin-15-in-not
net spindle-index-enable motion.spindle-index-enable <=> encoder.0.index-enable
net spindle-rps encoder.0.velocity => scale.0.in
net spindle-rpm scale.0.out
setp stepgen.0.position-scale [AXIS_0]SCALE
setp stepgen.0.steplen 1
setp stepgen.0.stepspace 0
setp stepgen.0.dirhold 35000
setp stepgen.0.dirsetup 35000
setp stepgen.0.maxaccel [AXIS_0]STEPGEN_MAXACCEL
net xpos-cmd axis.0.motor-pos-cmd => stepgen.0.position-cmd
net xpos-fb stepgen.0.position-fb => axis.0.motor-pos-fb
net xstep <= stepgen.0.step
net xdir <= stepgen.0.dir
net xenable axis.0.amp-enable-out => stepgen.0.enable
net home-x => axis.0.home-sw-in
setp stepgen.1.position-scale [AXIS_2]SCALE
setp stepgen.1.steplen 1
setp stepgen.1.stepspace 0
setp stepgen.1.dirhold 35000
setp stepgen.1.dirsetup 35000
setp stepgen.1.maxaccel [AXIS_2]STEPGEN_MAXACCEL
net zpos-cmd axis.2.motor-pos-cmd => stepgen.1.position-cmd
net zpos-fb stepgen.1.position-fb => axis.2.motor-pos-fb
net zstep <= stepgen.1.step
net zdir <= stepgen.1.dir
net zenable axis.2.amp-enable-out => stepgen.1.enable
net home-z => axis.2.home-sw-in
net estop-ext => iocontrol.0.emc-enable-in
loadusr -W hal_manualtoolchange
net tool-change iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-changed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Last edit: 28 Apr 2017 16:21 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Apr 2017 16:27 - 28 Apr 2017 16:42 #92282
by tecno
Replied by tecno on topic Spindel problems in Gmoccapy
Now no errors so I can start. But still no rpm show on screen.
I am a bit suspicious on the pulse length that Mach needs quite long pulse.
So maybe there must be some filters schmitt-trigger to make pulse suitable for LCNC.
How to measure incoming pulse width on pin 10?
Found the halscope in gmoccapy. pulsewidth 45/46 ms at low rpm of approx 200rpm
I am a bit suspicious on the pulse length that Mach needs quite long pulse.
So maybe there must be some filters schmitt-trigger to make pulse suitable for LCNC.
How to measure incoming pulse width on pin 10?
Found the halscope in gmoccapy. pulsewidth 45/46 ms at low rpm of approx 200rpm
Last edit: 28 Apr 2017 16:42 by tecno.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
28 Apr 2017 16:51 - 28 Apr 2017 16:51 #92286
by Todd Zuercher
Replied by Todd Zuercher on topic Spindel problems in Gmoccapy
You can easily look at parport.0.pin-10-in with Halscope.
But there are some other issues.
Not sure why you added a scale component for the encoder, the encoder has a scale built in.
Try this:
But there are some other issues.
Not sure why you added a scale component for the encoder, the encoder has a scale built in.
Try this:
# Generated by stepconf 1.1 at Mon Apr 17 15:16:45 2017
# If you make changes to this file, they will be
# overwritten when you run stepconf again
loadrt trivkins
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hal_parport cfg="0x378 out"
setp parport.0.reset-time 5000
loadrt stepgen step_type=0,0,0 ctrl_type=p,p,v
loadrt charge_pump
setp charge-pump.enable 1
net charge-pump <= charge-pump.out
loadrt encoder num_chan=1
loadrt scale count=1
loadrt near
net spindle-cmd-rpm => stepgen.2.velocity-cmd
setp stepgen.2.position-scale 0.9 #steps/RPM
setp stepgen.2.steplen 5000
setp stepgen.2.stepspace 5000
#setp stepgen.2.dirdelay 35000
setp stepgen.2.maxaccel 5000
addf parport.0.read base-thread
addf stepgen.make-pulses base-thread
addf charge-pump base-thread
addf parport.0.write base-thread
addf parport.0.reset base-thread
addf encoder.update-counters base-thread
addf encoder.capture-position servo-thread
addf scale.0 servo-thread
addf near.0 servo-thread
addf stepgen.capture-position servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf stepgen.update-freq servo-thread
net spindle-index => encoder.0.phase-Z => encoder.0.phase-A
net spindle-cmd-rpm <= motion.spindle-speed-out
net spindle-cmd-rpm-abs <= motion.spindle-speed-out-abs
net spindle-cmd-rps <= motion.spindle-speed-out-rps
net spindle-cmd-rps-abs <= motion.spindle-speed-out-rps-abs
net spindle-at-speed => motion.spindle-at-speed
net spindle-position encoder.0.position => motion.spindle-revs
net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
net spindle-enable <= motion.spindle-on => stepgen.2.enable
net spindle-cw <= stepgen.2.step
net spindle-ccw <= stepgen.2.dir
#setp encoder.0.counter-mode 1
setp encoder.0.position-scale 1
setp encoder.0.counter-mode 1
setp encoder.0.x4-mode FALSE
setp scale.0.gain 60
setp near.0.scale 1.2
setp near.0.difference 10
net spindle-cmd => near.0.in1
net spindle-rpm => near.0.in2
net spindle-at-speed near.0.out => motion.spindle-at-speed
net coolant-flood <= iocontrol.0.coolant-flood
net xstep => parport.0.pin-02-out
setp parport.0.pin-02-out-reset 1
net xdir => parport.0.pin-03-out
#setp parport.0.pin-04-out-invert 1
net zstep => parport.0.pin-04-out
setp parport.0.pin-04-out-reset 1
setp parport.0.pin-05-out-invert 1
net zdir => parport.0.pin-05-out
net spindle-cw => parport.0.pin-06-out
net spindle-ccw => parport.0.pin-07-out
net coolant-flood => parport.0.pin-09-out
net charge-pump => parport.0.pin-14-out
net spindle-index <= parport.0.pin-10-in
net home-z <= parport.0.pin-11-in-not
net home-x <= parport.0.pin-12-in-not
net estop-ext <= parport.0.pin-15-in-not
net spindle-index-enable motion.spindle-index-enable <=> encoder.0.index-enable
#net spindle-rps encoder.0.velocity => scale.0.in
#net spindle-rpm scale.0.out
setp stepgen.0.position-scale [AXIS_0]SCALE
setp stepgen.0.steplen 1
setp stepgen.0.stepspace 0
setp stepgen.0.dirhold 35000
setp stepgen.0.dirsetup 35000
setp stepgen.0.maxaccel [AXIS_0]STEPGEN_MAXACCEL
net xpos-cmd axis.0.motor-pos-cmd => stepgen.0.position-cmd
net xpos-fb stepgen.0.position-fb => axis.0.motor-pos-fb
net xstep <= stepgen.0.step
net xdir <= stepgen.0.dir
net xenable axis.0.amp-enable-out => stepgen.0.enable
net home-x => axis.0.home-sw-in
setp stepgen.1.position-scale [AXIS_2]SCALE
setp stepgen.1.steplen 1
setp stepgen.1.stepspace 0
setp stepgen.1.dirhold 35000
setp stepgen.1.dirsetup 35000
setp stepgen.1.maxaccel [AXIS_2]STEPGEN_MAXACCEL
net zpos-cmd axis.2.motor-pos-cmd => stepgen.1.position-cmd
net zpos-fb stepgen.1.position-fb => axis.2.motor-pos-fb
net zstep <= stepgen.1.step
net zdir <= stepgen.1.dir
net zenable axis.2.amp-enable-out => stepgen.1.enable
net home-z => axis.2.home-sw-in
net estop-ext => iocontrol.0.emc-enable-in
loadusr -W hal_manualtoolchange
net tool-change iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-changed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Last edit: 28 Apr 2017 16:51 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Apr 2017 17:04 #92288
by tecno
Replied by tecno on topic Spindel problems in Gmoccapy
Scale is in Norberts code
No difference, still same 45-46ms pulse width
No difference, still same 45-46ms pulse width
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4764
- Thank you received: 1464
28 Apr 2017 18:30 #92296
by Todd Zuercher
Replied by Todd Zuercher on topic Spindel problems in Gmoccapy
Sorry, I didn't look close enough to Norbert's post.
Changing this line I think might get you there.
net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
to
net spindle-rpm encoder.0.velocity => motion.spindle-speed-in
Sorry about that.
Changing this line I think might get you there.
net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
to
net spindle-rpm encoder.0.velocity => motion.spindle-speed-in
Sorry about that.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
28 Apr 2017 19:45 #92302
by tecno
Replied by tecno on topic Spindel problems in Gmoccapy
Will try this tomorrow, thanks.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
29 Apr 2017 09:34 - 29 Apr 2017 09:35 #92324
by tecno
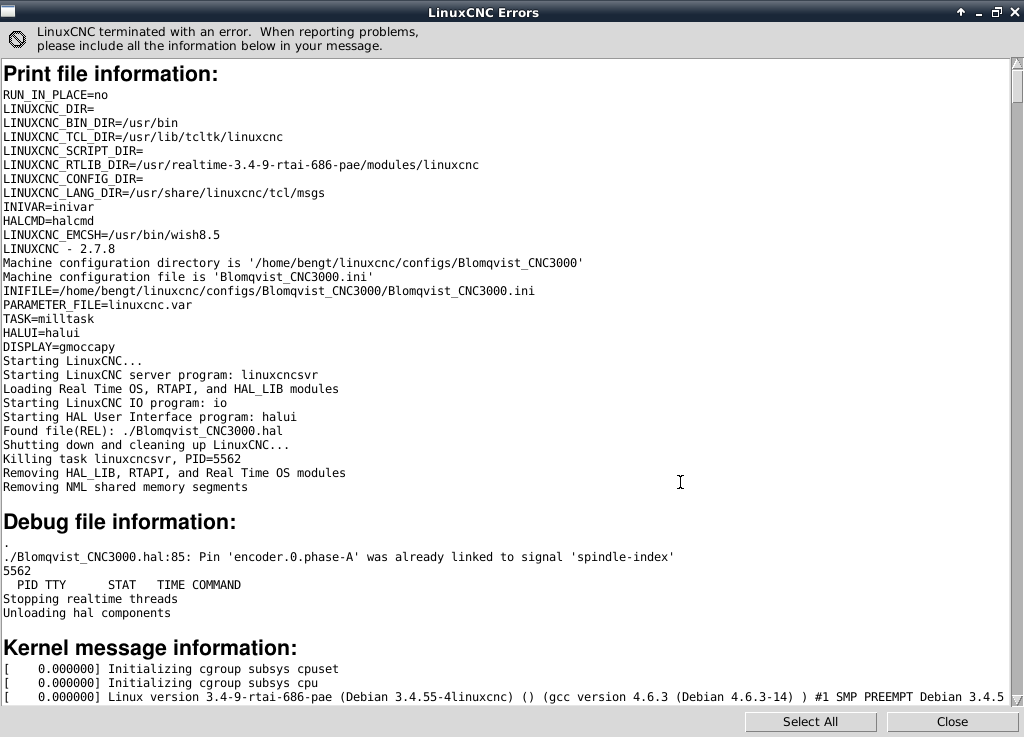
No such line in hal!
Added that line, nothing. No numbers showing real rpm yet.
Replied by tecno on topic Spindel problems in Gmoccapy
Sorry, I didn't look close enough to Norbert's post.
Changing this line I think might get you there.
net spindle-velocity encoder.0.velocity => motion.spindle-speed-in
to
net spindle-rpm encoder.0.velocity => motion.spindle-speed-in
Sorry about that.
No such line in hal!
Added that line, nothing. No numbers showing real rpm yet.
Last edit: 29 Apr 2017 09:35 by tecno.
Please Log in or Create an account to join the conversation.
- newbynobi
-
- Offline
- Moderator
-

Less
More
- Posts: 1931
- Thank you received: 394
29 Apr 2017 09:47 - 29 Apr 2017 09:48 #92327
by newbynobi
Replied by newbynobi on topic Spindel problems in Gmoccapy
I have tried to get your hal file OK.
So first I splitted it up. So in your INI you must load two hal files and one postgui hal file. Please find the modified files attached.
I did that, because this way it is easier to maintain and debug and correct.
I would recommend to split it even more so that you have one file for each part of your machine.
Please see also, that I did a little formating.
Also included the gmoccapy tool change and the tool offset connections.
Norbert
P.S. you must rename the files to fit your needs.
So first I splitted it up. So in your INI you must load two hal files and one postgui hal file. Please find the modified files attached.
I did that, because this way it is easier to maintain and debug and correct.
I would recommend to split it even more so that you have one file for each part of your machine.
Please see also, that I did a little formating.
Also included the gmoccapy tool change and the tool offset connections.
Norbert
P.S. you must rename the files to fit your needs.
Last edit: 29 Apr 2017 09:48 by newbynobi.
Please Log in or Create an account to join the conversation.
- tecno
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1850
- Thank you received: 127
29 Apr 2017 10:28 #92335
by tecno
Replied by tecno on topic Spindel problems in Gmoccapy
Thank you for the cleanup = much appreciated!
Still the problem remains = no real rpm shown.
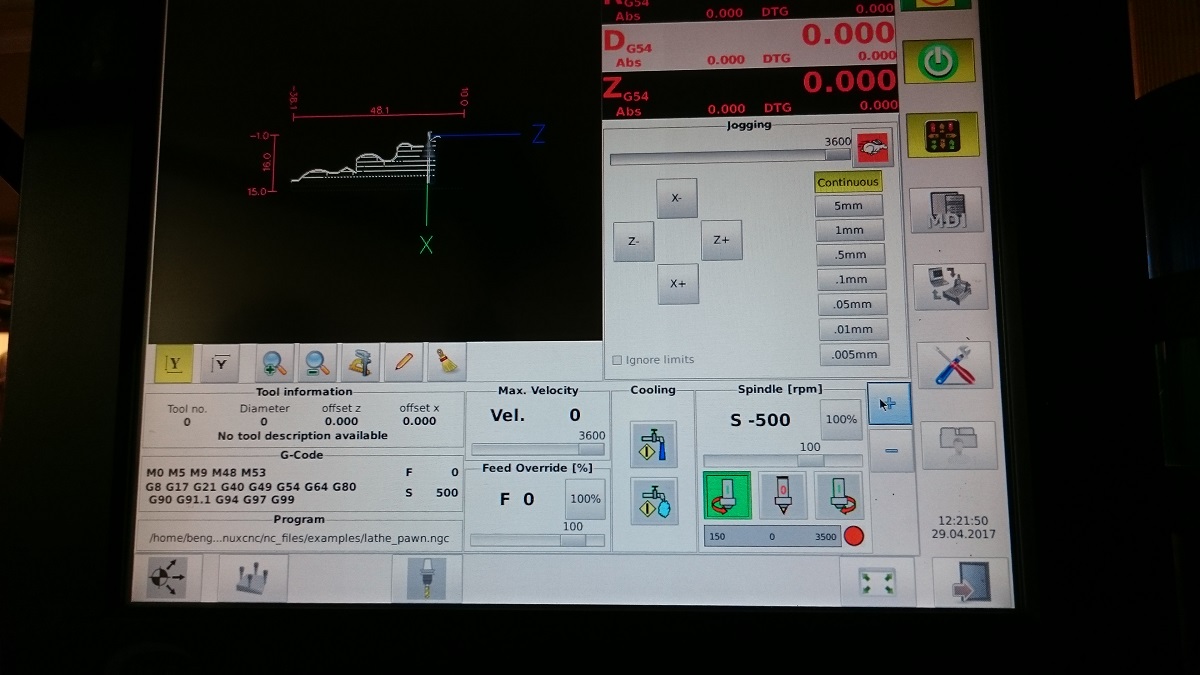
Also M3/M4. Lathe front tooling spindle rotation shown as negative.
Still the problem remains = no real rpm shown.
Also M3/M4. Lathe front tooling spindle rotation shown as negative.
Please Log in or Create an account to join the conversation.
Moderators: newbynobi, HansU
Time to create page: 0.351 seconds