Remora - ethernet NVEM / EC300 / EC500 cnc board
- DarkPhoinix
- Offline
- Premium Member
-

- Posts: 107
- Thank you received: 6
I have a nvem v5 with rt1052.
forum.linuxcnc.org/18-computer/55914-nve...xcnc-remora-firmware
Please Log in or Create an account to join the conversation.
- DarkPhoinix
- Offline
- Premium Member
-
- Posts: 107
- Thank you received: 6
Hi,Hey Scott,
Sorry to bug you again, but just wanted to let you know I finally managed to flash the firmware and ping 10.10.10.10! Next up is diving into the LinuxCNC side of things.
I’m planning to document everything I did to get it all working and might make a YouTube video showing the steps once my exams are out of the way next week. Also, I was thinking it’d be cool to contribute to the project documentation if there’s any way I can help out.
Thanks again for all your help – really appreciate it!
how did you solve the flash problems?
could you please insert the strings you inserted? Photos of the connection pins? Did you power the NVEM V5 at 12V or 24V? Did you press the button?
Please Log in or Create an account to join the conversation.
- DarkPhoinix
- Offline
- Premium Member
-
- Posts: 107
- Thank you received: 6
Hi,
pyocd reset --target mimxrt1050_quadspi
pyocd erase --chip --target mimxrt1050_quadspi
pyocd reset --target mimxrt1050_quadspi
pyocd flash remora-rt1052-3.1.3.bin --target mimxrt1050_quadspi
pyocd reset --target mimxrt1050_quadspi
I tried with stlink and j-link with errors.I also tried reversing swdio and swclk, because I saw images of pins connected differently.
Please Log in or Create an account to join the conversation.
- DarkPhoinix
- Offline
- Premium Member
-
- Posts: 107
- Thank you received: 6
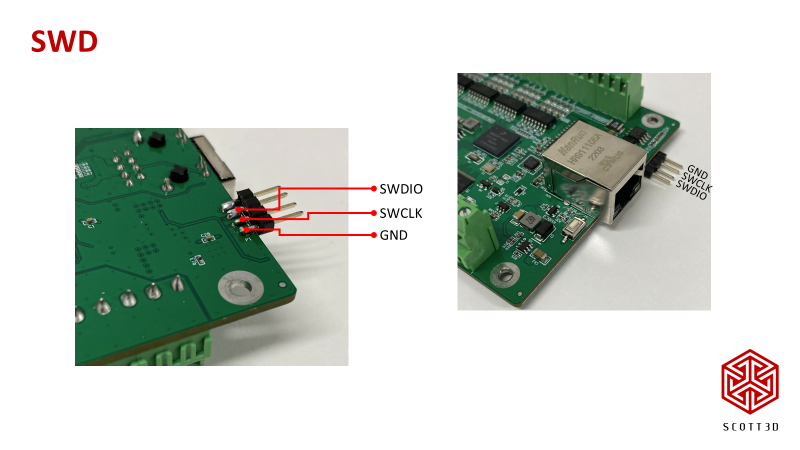
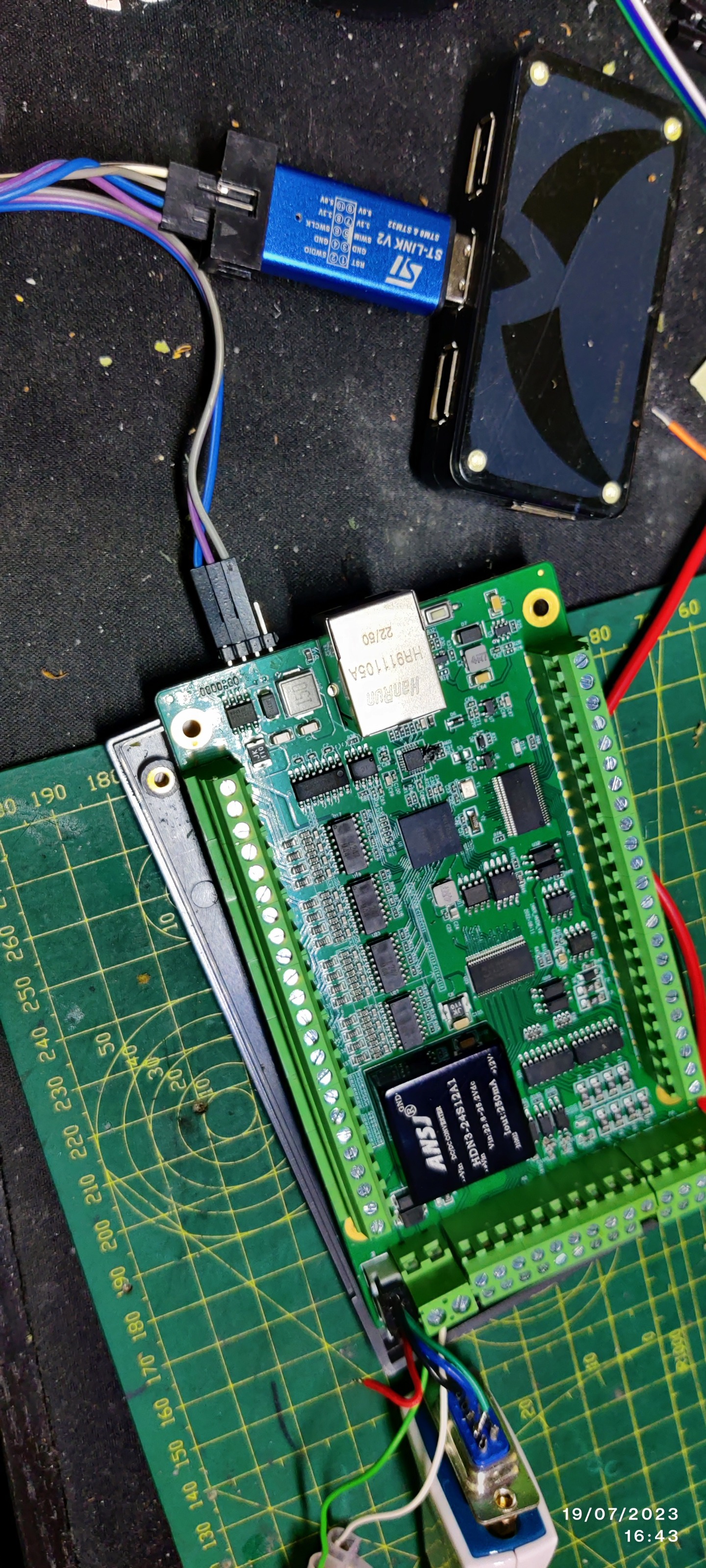
These are photos showing different connection diagrams with swdio and swclk reversed
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

- Posts: 21625
- Thank you received: 7383
For future reference, all users are able to delete their own posts.
Edit:
Apparently you did try and failed to delete the posts.
Can you edit them?
-
No matter what or how, feel free to do the same, namely request us to delete the posts.
Thank you.
Please Log in or Create an account to join the conversation.
- DarkPhoinix
- Offline
- Premium Member
-
- Posts: 107
- Thank you received: 6
I apologize, I accidentally pressed the Submit button twice and I was no longer able to delete, I didn't find any options, I even tried to delete the content to try to delete the post.As requested, deleted the empty posts.
For future reference, all users are able to delete their own posts.
Edit:
Apparently you did try and failed to delete the posts.
Can you edit them?
-
No matter what or how, feel free to do the same, namely request us to delete the posts.
Thank you.
I noticed a bug that if you quote a post and then edit the message your reply gets wrapped up in the quoted person's message
Anyway I'm still trying to figure out how to delete my posts I can't find an option when I edit, do I have to do it from the profile perhaps?
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
- Posts: 21625
- Thank you received: 7383
Please Log in or Create an account to join the conversation.
- DarkPhoinix
- Offline
- Premium Member
-
- Posts: 107
- Thank you received: 6
Thank you, very kind of you.No worries, you are welcomed here always.
Please Log in or Create an account to join the conversation.
- DarkPhoinix
- Offline
- Premium Member
-
- Posts: 107
- Thank you received: 6
Are MCUXpresso and the sdk for rt1050 necessary for pyocd?
Thanks to all people for the work of this project LinuxCNC and Remora!
Please Log in or Create an account to join the conversation.
- DarkPhoinix
- Offline
- Premium Member
-
- Posts: 107
- Thank you received: 6
is that correct?
or I have to do: git clone github.com/scottalford75/Remora-RT1052-cpp
remora-docs.readthedocs.io/en/latest/sof...mp-installation.html
I went a bit by instinct and installed this:
github.com/scottalford75/Remora-RT1052-c.../remora-rt1052-basic
linuxcnc gives me this error:
Error report created by /usr/lib/tcltk/linuxcnc/show_errors.tcl:
Print file information:
RUN_IN_PLACE=no
LINUXCNC_DIR=
LINUXCNC_BIN_DIR=/usr/bin
LINUXCNC_TCL_DIR=/usr/lib/tcltk/linuxcnc
LINUXCNC_SCRIPT_DIR=
LINUXCNC_RTLIB_DIR=/usr/lib/linuxcnc/modules
LINUXCNC_CONFIG_DIR=
LINUXCNC_LANG_DIR=/usr/lib/tcltk/linuxcnc/msgs
INIVAR=inivar
HALCMD=halcmd
LINUXCNC_EMCSH=/usr/bin/wish8.6
LINUXCNC - 2.9.4
Machine configuration directory is '/home/cnc/linuxcnc/configs/remora-rt1052-basic'
Machine configuration file is 'remora-ec500.ini'
INIFILE=/home/cnc/linuxcnc/configs/remora-rt1052-basic/remora-ec500.ini
VERSION=1.1
PARAMETER_FILE=linuxcnc.var
TPMOD=
HOMEMOD=
TASK=milltask
HALUI=halui
DISPLAY=axis
COORDINATES=X Y Z
KINEMATICS=trivkins coordinates=XYZ
Starting LinuxCNC...
Starting LinuxCNC server program: linuxcncsvr
Loading Real Time OS, RTAPI, and HAL_LIB modules
Starting LinuxCNC IO program: io
Starting HAL User Interface program: halui
linuxcnc TPMOD=tpmod HOMEMOD=homemod EMCMOT=motmod
Found file(REL): ./remora-ec500.hal
Found file(REL): ./remora-nv-mpg.hal
Shutting down and cleaning up LinuxCNC...
Removing HAL_LIB, RTAPI, and Real Time OS modules
Removing NML shared memory segments
Debug file information:
Note: Using POSIX realtime
nvmpg: dlopen: /usr/lib/linuxcnc/modules/nvmpg.so: cannot open shared object file: No such file or directory
./remora-nv-mpg.hal:6: waitpid failed /usr/bin/rtapi_app nvmpg
./remora-nv-mpg.hal:6: /usr/bin/rtapi_app exited without becoming ready
./remora-nv-mpg.hal:6: insmod for nvmpg failed, returned -1
3286
Stopping realtime threads
Unloading hal components
Note: Using POSIX realtime
-----------------------------------------------------------------------
Info report created by linuxcnc_info:
The file: /tmp/linuxcnc_info.txt
can be posted to a forum or a web site like:
http://pastebin.com
in order to provide information about the linuxcnc
system and configuration.
Date: sab 19 apr 2025, 16:46:59, CEST
UTC Date: sab 19 apr 2025, 14:46:59, UTC
this program: /usr/bin/linuxcnc_info
uptime: 16:46:59 up 12 min, 1 user, load average: 1,33, 1,38, 0,81
lsb_release -sa: Debian Debian GNU/Linux 12 (bookworm) 12 bookworm
linuxcnc: /usr/bin/linuxcnc
pwd: /home/cnc/linuxcnc/configs/remora-rt1052-basic
USER: cnc
LOGNAME: cnc
HOME: /home/cnc
EDITOR:
VISUAL:
LANGUAGE:
TERM: dumb
COLORTERM:
DISPLAY: :0.0
DESKTOP: lightdm-xsession
display size: 1920x1200 pixels (508x317 millimeters)
PATH: /usr/bin:/home/cnc/linuxcnc/configs/remora-rt1052-basic/bin:/usr/bin:/usr/local/bin:/usr/bin:/bin:/usr/local/games:/usr/games
uname items:
nodename -n: cnc
kernel-name -s: Linux
kernel-vers -v: #1 SMP PREEMPT_RT Debian 6.1.133-1 (2025-04-10)
machine -m: x86_64
processor -p: unknown
platform -i: unknown
oper system -o: GNU/Linux
/proc items:
cmdline: BOOT_IMAGE=/boot/vmlinuz-6.1.0-33-rt-amd64 root=UUID=e5282ae9-3e96-4f4e-9c6c-19b3dd421c80 ro initrd=/install/gtk/initrd.gz quiet
model name: Intel(R) Core(TM) i5-3470 CPU @ 3.20GHz
cores: 4
cpu MHz: 3425.725
parport: 0000-0000 : parport0 0000-0000 : parport0
serial: 0000-0000 : serial
Versions:
gcc: gcc (Debian 12.2.0-14) 12.2.0
python: Python 3.11.2
git: git version 2.39.5
git commit: NA
tcl: 8.6
tk: 8.6
glade: not_in_PATH
linuxcnc_var all:
LINUXCNCVERSION: 2.9.4
LINUXCNC_AUX_GLADEVCP: /usr/share/linuxcnc/aux_gladevcp
LINUXCNC_AUX_EXAMPLES: /usr/share/linuxcnc/aux_examples
REALTIME: /usr/lib/linuxcnc/realtime
RTS: uspace
HALLIB_DIR: /usr/share/linuxcnc/hallib
PYTHON: /usr/bin/python3
dpkg -l '*linuxcnc*':
Voluto=U (non noto)/I (installato)/R (rimosso)/P (rimosso totale)/H (in attesa)
| Stato=Non/Inst/Conf-files/Unpacked/halF-conf/Half-inst/trig-aWait/Trig-pend
|/ Err?=(nessuno)/R (reinstallazione richiesta) (Stato,Err: maiuscolo=grave)
||/ Nome Versione Architettura Descrizione
+++-===================-============-============-=====================================================================
un linuxcnc <nessuna> <nessuna> (nessuna descrizione disponibile)
un linuxcnc-dev <nessuna> <nessuna> (nessuna descrizione disponibile)
un linuxcnc-doc <nessuna> <nessuna> (nessuna descrizione disponibile)
ii linuxcnc-doc-de 1:2.9.4 all motion controller for CNC machines and robots (German documentation)
ii linuxcnc-doc-en 1:2.9.4 all motion controller for CNC machines and robots (English documentation)
ii linuxcnc-doc-es 1:2.9.4 all motion controller for CNC machines and robots (Spanish documentation)
ii linuxcnc-doc-fr 1:2.9.4 all motion controller for CNC machines and robots (French documentation)
un linuxcnc-sim <nessuna> <nessuna> (nessuna descrizione disponibile)
un linuxcnc-sim-dev <nessuna> <nessuna> (nessuna descrizione disponibile)
ii linuxcnc-uspace 1:2.9.4 amd64 motion controller for CNC machines and robots
ii linuxcnc-uspace-dev 1:2.9.4 amd64 PC based motion controller for real-time Linux Please Log in or Create an account to join the conversation.